Расчет структурно-алгоритмической схемы системы автоматического регулирования
Московский государственный текстильный университет им. А.Н. Косыгина
Кафедра автоматики и промышленной электроники
Курсовая работа
по дисциплине: «Теория автоматического управления»
на тему: «Расчет структурно-алгоритмической схемы системы автоматического регулирования»
Выполнил: студент гр. 14ВД-06
Кириллов М.В.
Принял: Ермолаев Ю.М.
Москва, 2011 г.
Перечень подлежащих разработке вопросов (содержание расчетно-пояснительной записки)
Математические модели, используемые при выполнении курсовой работы
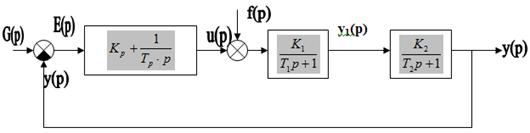
1. По заданным математическим моделям получить структурно-алгоритмическую схему системы автоматического регулирования
2. Определить передаточные функции разомкнутой системы Y(p) / G(p), замкнутой системы Y(p) / G(p), Y(p) / F(p), E(p) / G(p), E(p) / F(p)
3. Для заданных исходных данных построить область устойчивости системы в плоскости параметров регулятора
4. Для заданной допустимой ошибки регулирования 5% определить значение Kp регулятора, при условии, что регулятор обеспечивает «П» - закон регулирования
5. Для значений параметров регулятора, выбранных произвольно из области устойчивости системы, построить кривые Михайлова и Найквиста
6. Повторить п. 5 задания для значений параметров регулятора, выбранных из области неустойчивой системы
7. Рассчитать настройки регулятора, обеспечивающие минимальное значение интегральной оценки качества
8. Построить переходные характеристики системы по задающему и возмущающему воздействию для значений параметров регулятора выбранных по пп. 5 и 7
9. Определить показания качества системы
Математические модели, используемые при выполнении курсовой работы
Исходные данные: K1 = 2; K2 = 0,7; T1 = 1; T2 = 0,5.
1. По заданным математическим моделям получить структурно-алгоритмическую схему системы автоматического регулирования
а) ![]() - уравнение сумматора
- уравнение сумматора
б) ![]() - уравнение регулятора
- уравнение регулятора
Применяя операторный метод Лапласа, получим:
![]() ;
;
в) ![]() - апериодическое звено на выходе
- апериодическое звено на выходе ![]()
Применяя операторный метод Лапласа, получим:
![]()
![]()
![]() ;
;
г) ![]() - апериодическое звено (инерционное) на выходе
- апериодическое звено (инерционное) на выходе ![]()
Применяя операторный метод Лапласа, получим:
![]()
![]()
![]()
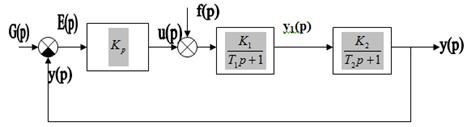
Из данных нам математических моделей составим общую структурно-алгоритмическую схему системы автоматического регулирования:
2. Определить передаточные функции разомкнутой системы Y() / G(), замкнутой системы Y() / G(), Y() / F(), E() / G(), E() / F()
Передаточная функция – это отношение изображений по Лапласу выходной величины к входной при нулевых начальных условиях.
![]()
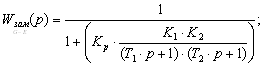
Передаточная функция разомкнутой системы:
![]()

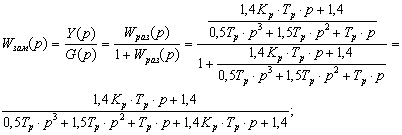
Передаточная функция для замкнутой системы:
![]()
![]()

![]()
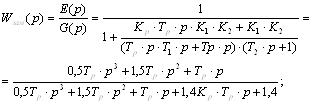
![]()
3. Для заданных исходных данных построить область устойчивости системы в плоскости параметров регулятора

Чтобы получить характеристическое уравнение нашей системы, приравняем знаменатель передаточной функции ![]() к нулю.
к нулю.
Система третьего порядка:
![]()
![]()
Представим:
a0 = 0,5Tp; a1 = 1,5Tp; a2 = Tp (1+1,4Kp); a3 = 1,4;
Используем критерии устойчивости Гурвица.
Необходимо и достаточно, чтобы выполнялись следующие условия:
1) ![]() (все коэффициенты характеристического уравнения положительны);
(все коэффициенты характеристического уравнения положительны);
2) ![]() >
>![]()
при равенстве а1а2=а0а3 система находится на границе устойчивости.
Система будет устойчива, если:
Тр>0;
![]()
![]()
![]()
![]()
![]()
![]()
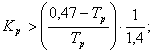
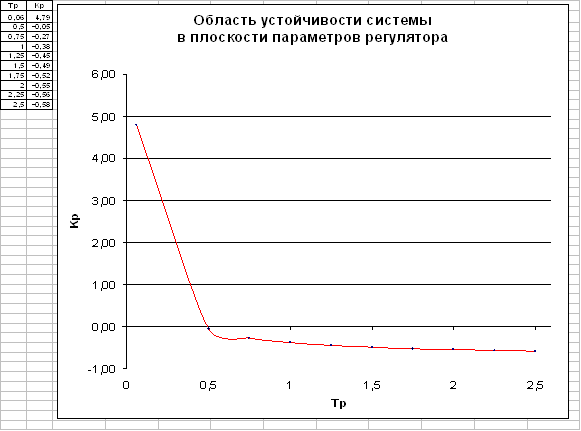
По найденному графику функции ![]() построим область устойчивости системы в плоскости параметров регулятора.
построим область устойчивости системы в плоскости параметров регулятора.
4. Для заданной допустимой ошибки регулирования 5% определить значение Кр регулятора, при условии, что регулятор обеспечивает «П» - закон регулирования
Структурная схема при использовании «П» - закона регулирования:
Еуст= 5 % = 0,05;
![]()
Wp = Kp;
G(p) = 1(t);
G(p) = g(t);
g(t) = A = 1;
G(p)=![]() ;
;
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
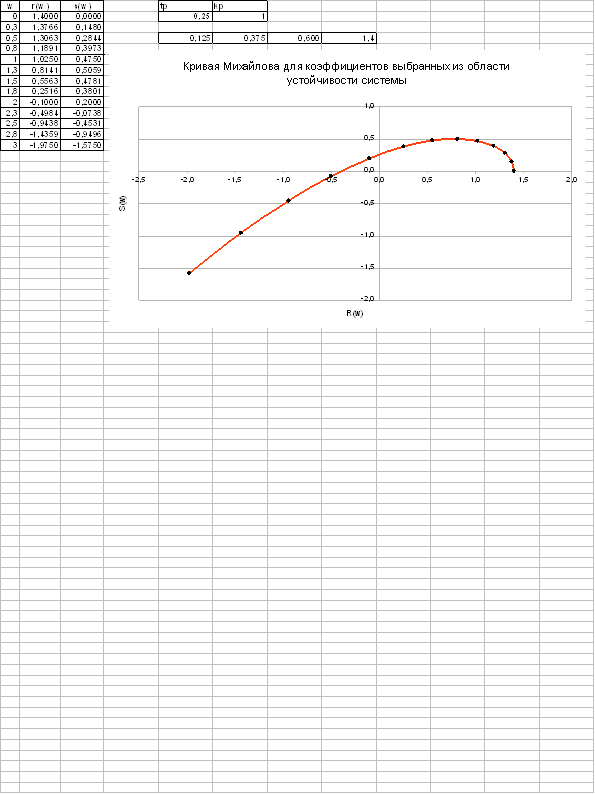
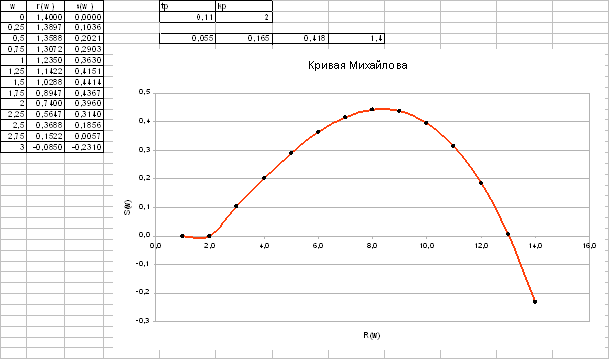
5. Для значений параметров регулятора, выбранных произвольно из области устойчивости системы, построить кривые Михайлова и Найквиста
Выберем произвольно из области устойчивости системы параметры:
Тр=0,25; Кр=1;
Построим кривую Михайлова и Найквиста.
Кривая Михайлова
Характеристическое уравнение нашей системы:
![]()
![]()
![]()
Заменим p на ![]() получим:
получим:
![]()
![]()
![]() ;
; ![]()
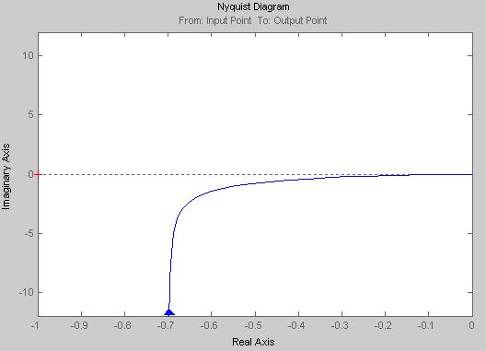
Кривая Найквиста
Строим при помощи MatLab 6.5;
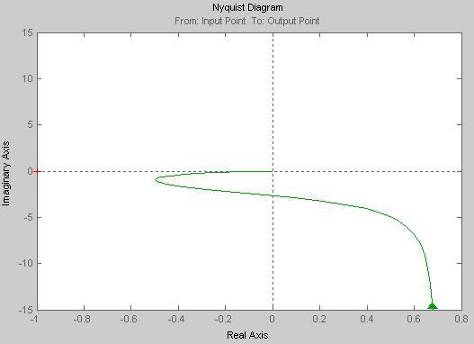
6. Повторить п. 5 задания для значений параметров регулятора, выбранных из области неустойчивой системы
Выберем произвольно из области неустойчивости системы параметры:
Тр=2; Кр=0,11;
Построим кривую Михайлова и Найквиста.
Кривая Михайлова
Характеристическое уравнение нашей системы:
![]()
![]()
![]()
Заменим p на ![]() получим:
получим:
![]()
![]()
![]() ;
; ![]()
Кривая Найквиста
Строим при помощи MatLab 6.5;
7. Рассчитать настройки регулятора, обеспечивающие минимальное значение интегральной оценки качества
Вычислим квадратичную интегральную оценку методом Мандельштама.
![]()

Для получения ![]() и
и ![]() вычислим квадратичную интегральную оценку.
вычислим квадратичную интегральную оценку.
К1=2; К2=0,7; Т1=1; Т2=0,5; Кр=13,57;
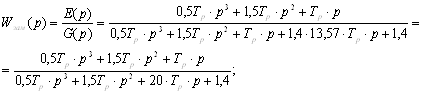 (1)
(1)
![]()

![]()
Запишем знаменатель выражения (1) в виде:
![]()
Обозначим: а0=0,5Тр; а1=1,5Тр; а2=20Тр; а3=1,4;
![]() (2)
(2)
Обозначим: ![]() .
.
Умножаем поочередно уравнение (2) на ![]() .
.
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
2) Почленно интегрируем уравнения (3), (4) и (5).




В итоге, интегрирование (3) уравнения дает:
![]()

![]()
Уравнение (4):
![]()

В итоге, интегрирование (4) уравнения дает:
![]()

![]()
Уравнение (5):



В итоге, интегрирование (5) уравнения дает:
![]()

![]()
3) Получаем систему из трех уравнений относительно 3-х неизвестных:
Выразим ![]() и
и ![]() :
:


Выразим ![]() :
:
![]()
![]()
![]()
![]()
4) Берем производную по ![]() и приравниваем к нулю:
и приравниваем к нулю:
![]()
![]()
![]()
![]()
![]()
8. Построить переходные характеристики системы по задающему и возмущающему воздействию для значений параметров регулятора выбранных по пп. 5 и 7
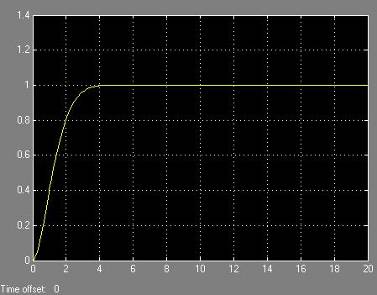
Переходная характеристика по задающему воздействию для значений параметров регуляторов выбранных из пункта № 5.
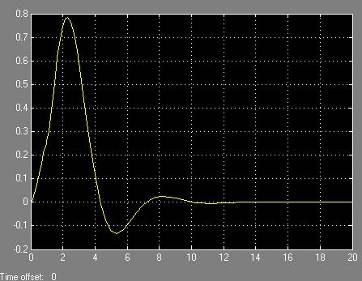
Переходная характеристика по возмущающему воздействию для значений параметров регуляторов выбранных из пункта № 5.
автоматический кривая михайлов найквист регулятор
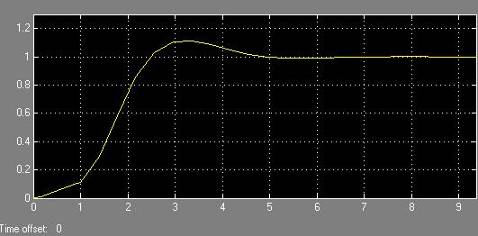
Переходная характеристика по задающему воздействию для значений параметров регуляторов выбранных из пункта № 7.
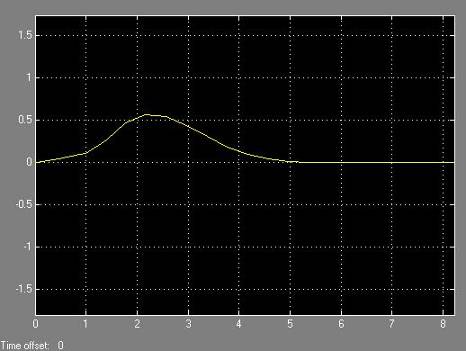
Переходная характеристика по возмущающему воздействию для значений параметров регуляторов выбранных из пункта № 7.
9. Определить показатели качества системы
Переходная характеристика по задающему воздействию для значений параметров регуляторов выбранных из пункта № 5.
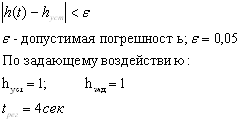
Время регулирования
Теоретически время достижения выходной координаты до заданного значения равно бесконечности, поэтому вводится допустимая погрешность.
В момент, когда выходная координата попадает в область допустимых значений и больше из нее не выходит, считается окончанием процесса регулирования.
Статическая точность
![]()
Характеризует статический режим в системе и не зависит от динамики переходного процесса.
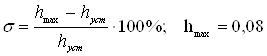
Величина перерегулирования
Перерегулирование – это максимальное превышение регулируемой величины над установившемся значением.

Колебательность
Система совершила за время регулирования 2 полных колебания.
По возмущающему воздействию:
tрег = 5,5 сек
![]()
По пункту 7
По задающему воздействию:
tрег = 2,2 сек
![]()
![]()
1 полное колебание.
По возмущающему воздействию:
tрег = 18 сек
![]()