Цифровой согласованный обнаружитель сигналов
Основным назначением любого приемника является выделение (обнаружение) полезного сигнала или его параметров из действующей на входе приемника аддитивной смеси сигнала и помехи (шума). Среди прочих задач можно выделить задачу обнаружения полезного сигнала, она состоит в том, чтобы определить, имеется ли в действующем на входе приемника колебании полезный сигнал или оно образовано только помехой (шумом). Приемник в результате решения этой задачи должен дать ответ типа “да” или “нет”, т.е. имеется ли полезный сигнал или нет.
Обнаружение, прием и обработка сигналов производится по определенным правилам, а оптимальная решающая схема построения приемного устройства, работающего в условиях различных помех, находится методом теории статистических решений, при заданном критерии качества. Приемник с оконечными устройствами, работающими по определенным правилам, будет выдавать различные решения, одни из которых будут верными (о наличии сигнала в анализируемой смеси), а другие ошибочными.
Для решения задач обнаружения строят оптимальные приемники, в состав которых входят линейные фильтры, а именно согласованные. Выбор критерия оптимальности определяется решаемой задачей.
В данной курсовой работе входными сигналами является пачка, состоящая из линейных частотно – манипулированных (ЛЧМ) сигналов с заданными значением частоты девиации.
1 Анализ технического задания
Согласно заданию, необходимо спроектировать цифровой согласованный обнаружитель сигналов для пачки, состоящей из пяти ЛЧМ – импульсов с заданным значением частоты девиации, а именно девиация равна 1 МГц, а частота входного сигнала 4 МГц, тогда по теореме Котельникова (частота дискретизации должна быть как минимум в 2 раза больше максимальной частоты сигнала) возьмем частоту дискретизации равной 10 МГц.
Необходимо организовать согласованный прием каждого импульса, накопление, для этого используем накопитель, и детектирование сжатых сигналов, для этого используем детектор, состоящий из фильтра низких частот и устройства взятия модуля . По заданию должен осуществляться когерентный прием, то есть он происходит при следующих условиях:
· передаваемые сигналы полностью известны
· канал связи имеет известные параметры
· помеха носит аддитивный характер
· синхронизация сигналов является идеальной
Согласно этим условиям и осуществляется когерентный прием.
Так как параметры ЛЧМ - сигнала должны быть известны, то примем изначально, что фаза равна нулю.
Структуру обнаружителя можно определить следующим образом:
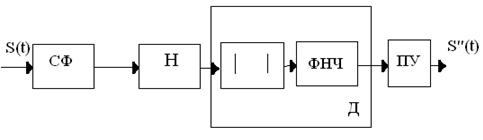
Рисунок 1- Структурная схема цифрового согласованного обнаружителя сигналов
2 Линейные частотно – манипулированные сигналы
Подобный сигнал изображен на рисунке 2,а, а закон изменения частоты заполнения импульса – на рисунке 2,б.
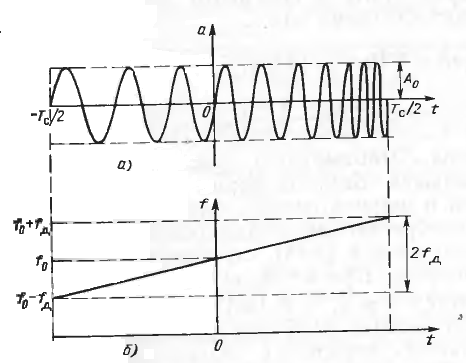
Рисунок 2 – ЛЧМ – импульс (а) и
изменение частоты его заполнения(б).
Мгновенную частоту заполнения ![]() можно определить выражением:
можно определить выражением:
![]()
![]() (1)
(1)
где ![]() (2)
(2)
есть скорость линейного изменения частоты внутри импульса. Тогда мгновенное значение колебания, представленного на рисунке 2, а, можно записать в виде:
![]() ,
, ![]() (3)
(3)
Произведение полной девиации частоты на длительность импульса
![]() (4)
(4)
является основным параметром ЛЧМ – сигнала.(1)
3 Согласованный фильтр
Оптимальный по критерию максимума отношения:
![]() , (5)
, (5)
где ![]() - возможный максимум (пика) сигнал y(nT);
- возможный максимум (пика) сигнал y(nT);
T – период дискретизации;
![]() - среднеквадратичное (эффективное) значение шума линейный фильтр называется согласованным (СФ) с сигналом.
- среднеквадратичное (эффективное) значение шума линейный фильтр называется согласованным (СФ) с сигналом.
Согласованный фильтр, являясь линейным, полностью описывается импульсной hСФ(nT) и частотной HСФ(ejwt) характеристиками, которые связаны между собой преобразованием Фурье:
 (6)
(6)
Импульсная характеристика СФ является «зеркальным отражением» согласованного с ним сигнала:
![]() (7)
(7)
Соответственно амлитудо – частотная характеристика (АЧХ) определится как модуль частотной:
![]() (8)
(8)
а фазочастотная характеристика(ФЧХ) как аргумент частотной. (2)
4 Моделирование
Моделирование будем выполнять в программной среде MATLAB 7.0. Для начала необходимо создать один ЛЧМ - сигнал, а затем сформировать из пяти таких импульсов пачку, пропустить через СФ, подать на накопитель для формирования сжатого сигнала, после чего детектировать с помощью детектора. Затеи отправить на пороговое устройство, чтобы определить наличие полезного сигнала и дать решение о том, сигнал был или нет. Рассмотрим каждый из этих этапов более подробно.
4.1 Создание ЛЧМ импульса
Исходными данными являются частота входного сигнала f0= 4МГц, девиация равна 1 МГц, это значит, что частота линейно изменяется от 3 МГц до 5 МГц. Длительность импульса равна 50 мкс.
Для того чтобы построить ЛЧМ – импульс, необходимо определить и построить закон изменения частоты. В результате получаем ![]() , изобразим его:
, изобразим его:
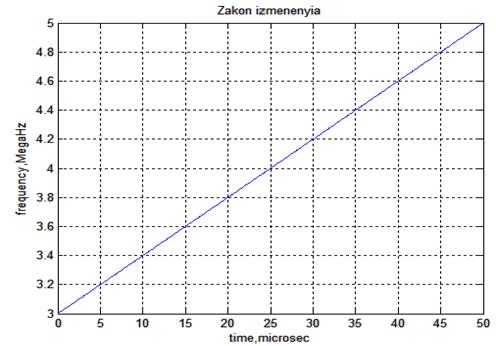
Рисунок 3 – Закон изменения частоты заполнения
Построим сам импульс в соответствии с данным законом изменения частоты заполнения.
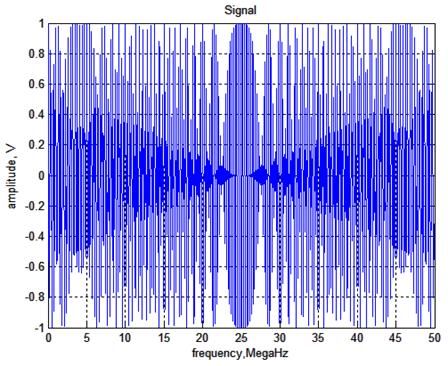
Рисунок 4 – ЛЧМ – импульс
Теперь сформируем пачку из пяти таких импульсов периодом следования Т=500 мкс и добавим в канал аддитивный шум, так как он необходим для когерентного приема. Получаем:
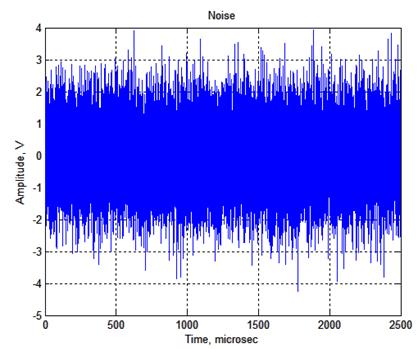
Рисунок 5 – Изображение шума
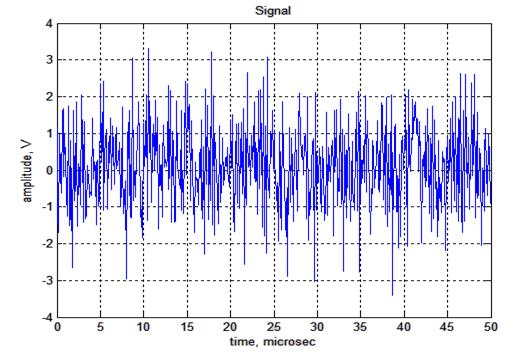
Рисунок 6 – ЛЧМ – импульс с шумом
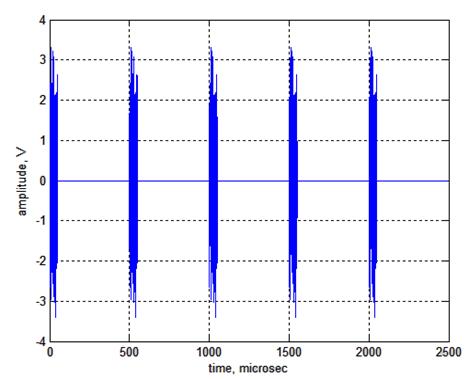
Рисунок 7 – Пачка из пяти ЛЧМ – импульсов с шумом
Как видно из рисунка 5, амплитуда шума больше амплитуды сигнала, поэтому отношение С/Ш в данном случае равно 0.0683.
4.2 Создание согласованного фильтра и его импульсной характеристики
При синтезе исходим из того, что импульсная характеристика согласованного фильтра (СФ) должна представлять собой “зеркальную” копию выделяемого сигнала с обращенным во времени порядком следования отдельных позиций. Получаем:
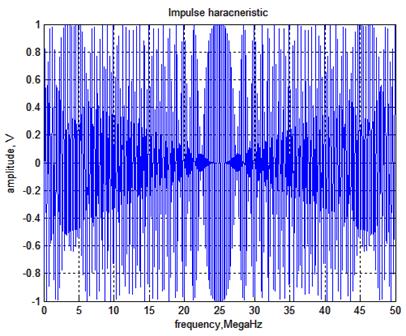
Рисунок 8 – Изображение импульсной характеристики СФ без шума
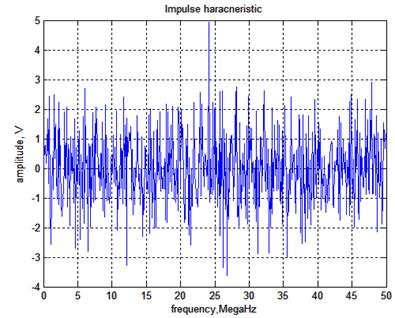
Рисунок 9 – Изображение импульсной характеристики СФ с шумом
Все дальнейшие операции, то есть накопление и детектирование, будем производить при наличии аддитивного шума, изображенного на рисунке 5.
4.3 Прохождение через согласованный фильтр
Как было сказано выше, в канале присутствует шум.
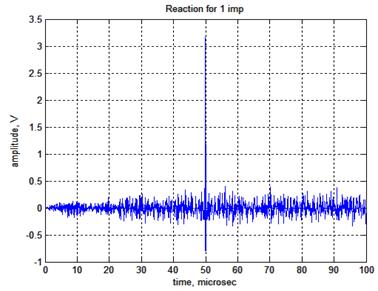
Рисунок 10 – Реакция СФ на один ЛЧМ – импульс
4.4 Создание накопителя и прохождение через него
обнаружитель сигнал частотный фильтр
Накопитель создадим с помощью блоков повторения через период Т=500мкс, таким образом, их будет четыре, так как необходимо получить пачку из пяти импульсов, и с помощью сумматора, который суммирует их и получит сжатый сигнал . После всех этих операций получаем:
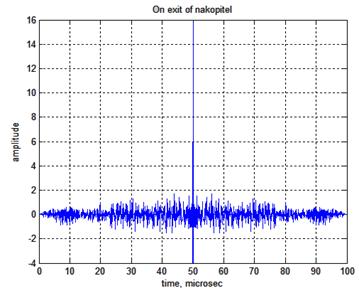
Рисунок 11 – Сигнал на выходе накопителя
4.5 Создание детектора и прохождение через него
Как было показано в структурной схеме, детектор состоит из устройства взятия модуля и ФНЧ. Для подавления лепестков сжатого сигнала используем метод взвешивания импульсной характеристики. Новая импульсная характеристика формируется по правилу:
h' (nT) = W (nt) * h (nT)
где W (nT) - весовая функция или "сглаживающее окно".
Находят применение различные типы окон, например "окно Хэмминга”:
W=0.42+0.5*cos(2*pi*n/N)+0.08*cos(4*pi*n/N); с помощью этого окна «взвесим» импульсную характеристику ФНЧ. На выходе детектора получаем следующий сигнал:
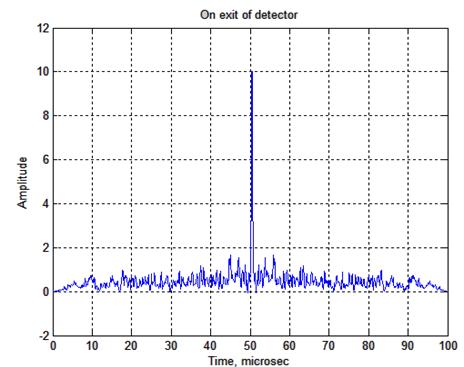
Рисунок 12 – Сигнал на выходе детектора
4.6 Создание порогового устройства и анализ полученного результата
Значение порога выбираем экспериментально, возьмем значение порога равным пяти, сравним возможный максимум (пик) полученного сигнала с этим порогом, при этом примем, что если полезный сигнал присутствует, то на выходе порогового устройства выдается прямоугольный импульс с амплитудой 1 на заданном интервале времени. Получаем следующий результат.
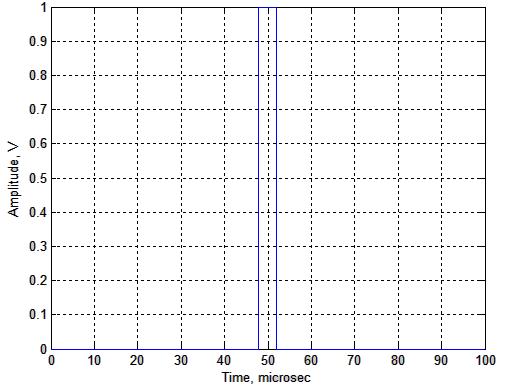
Рисунок 13 – Сигнал на выходе порогового устройства
По рисунку 13, определяем, что в канале в интервале от 48мкс до 52 мкс присутствует полезный сигнал.
Здесь продемонстрирован прием лишь при одном значении С/Ш, использовали это значение, так как оно показывает наиболее реальную ситуацию, когда шум больше сигнала. Таким образом, можно сделать вывод, сто чем больше отношения С/Ш, тем лучше будет прием сигналов.
5 Функциональная схема цифрового согласованного обнаружителя сигналов

Порог
![]()
![]()
![]() «1»
«1»
Рисунок 14 - Функциональная схема цифрового согласованного обнаружителя сигналов
Заключение
В ходе выполнения данной курсовой работы был спроектирован цифровой согласованный обнаружитель сигналов, с помощью согласованного фильтра, накопителя, состоящего из блоков повторения через период и сумматора, детектора, состоящего из устройства взятия модуля и ФНЧ, и с помощью порогового устройства.
Была сформирована пачка из пяти ЛЧМ – импульсов , для этих импульсов были заданны длительность и периодом повторения, а также частота входного сигнала и девиация, была получена импульсная характеристика используемого согласованного фильтра.
Согласно заданию было необходимо организовать согласованный прием каждого импульса, что и было сделано с помощью среды моделирования MATLAB.
Приложение 1 : Текст написанной программы
clc;
clear all;
Fd=10; % Частота дискретизации, МГц
f0=4; % Частота сигнала, МГц
t=0:1/Fd:2500; % время в микросекундах
T=1/Fd; % период дискретизации
f=0.04*t+3;%построим закон изменения частоты
figure (1);
plot (t(1:500),f(1:500));
grid on;
xlabel('time,microsec');
ylabel ('frequency,MegaHz');
title('Zakon izmenenyia');
% создание шума
Noise=randn(1,25001);
figure (2); % вывод на экран изображение шума
plot (t(1:25000),Noise (1:25000));
xlabel ('Time, microsec');
ylabel ('Amplitude, V');
grid on;
title ('Noise');
% % создание ЛЧМ-импульса
S=cos(2*pi*(0.04*t+3).*t)+ Noise;
% S=cos(2*pi*(0.04*t+3).*t)
figure (3);
plot(t(1:500),S(1:500));
grid on;
xlabel('time, microsec');
ylabel ('amplitude, V');
title('Signal')
% создаем соглаcованный фильтр
for q=1:1:500
h_SF(q)=S(501-q);
end
figure (4);
plot (t(1:500),h_SF(1:500));
grid on;
xlabel('frequency,MegaHz');
ylabel ('amplitude, V');
title('Impulse haracneristic')
% реакция согласованного фильтра на один ЛЧМ-импульс
ReactionSF1=filter (h_SF,1,S)./(0.5*50*10);
figure (5); % вывод на экран реакции
plot (t(1:1000),ReactionSF1(1:1000));
grid on;
xlabel('time, microsec');
ylabel ('amplitude, V');
title('Reaction for 1 imp');
% создание пачки из 5 ЛЧМ-импульсов
P=zeros(1,25000);
for i=1:5000:25000
P(i+1:i+500) = S(1:500);
end
figure(6);
plot(t(1:25000),P(1:25000));
grid on;
xlabel('time, microsec');
ylabel ('amplitude, V');
% Вычисляем уровень сигнал\шум
Noise_v_kv = power (Noise,2);
z=trapz(t,Noise_v_kv); % вычисление среднеквадратичного значения шума
P_N=max(abs(P))./sqrt(z);
disp (P_N);
% формируем накопитель
for q=1:1:500;
for i=1:5000:25000;
h_1(q) = P((501-q)+i);
end
end
ReactionSF = filter(h_1,1,P)./(0.5*50*10);
figure (7);
plot(t(1:25000),ReactionSF(1:25000));
grid on;
xlabel ('time, microsec');
ylabel ('amplitude, V');
title('Reaction for 5 imp');
for i = 5000:5000:25000
Reaction=ReactionSF(1:1000)+ReactionSF(i+1:i+1000);
figure (8);
plot(t(1:1000),Reaction(1:1000));
grid on;
xlabel ('time, microsec');
ylabel ('amplitude');
title('On exit of nakopitel')
%создание детектора
reaction=abs(Reaction);
figure (9);
plot(t(1:1000),reaction(1:1000));
%создание ФНЧ, входящего в состав детектора
N =10;
f1=0.2; f2=0.3;
f0=(f1+f2)/2;
d1=3; d2=50;
n = -(N-1)/2:1:(N-1)/2; %отсчеты
N0=(f2-f1)/2;
Hn =sin(f0*2*pi*n)./(n*pi); %задание ИХ
(H,w)=freqz(Hn,1,1024);% АЧХ фильтра
W1=HAMMING(N)'; % применяем окно в качестве взвешивающей функции
(Hw1,ww1)=freqz(W1,1,1024); % часть характеристики окна
h1=Hn.*W1;
(H1,w1)=freqz(h1,1,1024);
F_h=filter(h1,1,reaction);
figure(10);
plot(t(1:1000),F_h(1:1000));
grid on;
xlabel ('Time, microsec')
ylabel ('Amplitude');
title('On exit of detector');
% пороговое устройство
priem=zeros (1, 1000);
if max (reaction)> 2; % порог
priem(480:520) = 1;% max (vuhod_modul);
disp('сигнал был');% вывод на экран
end
figure (11);
plot(t(1:1000),priem(1:1000));
grid on;
xlabel ('Time, microsec');
ylabel ('Amplitude, V');
title ('Priem');