Радиоэлектронные средства навигации и связи
Аналитический обзор аэродромных РЛС
Назначение, размещение и особенности аэродромных РЛС
Нормативы ICAO для аэродромных РЛС
Расчет технических параметров РЛС
Описание упрощенной структурной схемы РЛС и принципов ее работы
Заключение
Список использованных источников
Введение
Безопасность и регулярность полетов воздушных судов, а также экономические показатели воздушного движения самолетов гражданской авиации в значительной степени определяются радиотехническими средствами обеспечения полетов. С помощью радиотехнических средств диспетчеры службы движения решают такие задачи, как управление движением ВС на земле и в полете, предотвращение конфликтных ситуаций в воздухе, обеспечение безопасных интервалов между воздушными судами в вертикальной и горизонтальной плоскостях, принятие своевременных мер по оказанию помощи экипажам при особых случаях в полете.
Среди радиотехнических средств обеспечения полетов особое место занимают радиолокационные станции (РЛС). К их характерным свойствам относятся:
высокая оперативность получения данных о координатах самолетов и дополнительной полетной информации, необходимой для УВД (номер рейса, высота, запас топлива, вектор скорости, сигналы об аварийных ситуациях);
достаточно высокая степень объективности полученных данных, поскольку субъективный фактор в радиолокационных станциях проявляется лишь на последней стадии переработки информации при считывании ее диспетчером;
полнота информации о состоянии воздушной обстановки во всей контролируемой зоне управления;
наглядность представления информации о местоположении самолетов и в некоторых случаях даже траекторий их движения, так как радиолокационное изображение воздушной обстановки на экранах индикаторов РЛС, как правило, является как бы уменьшенной моделью реального расположения самолетов в пространстве;
высокая точность и надежность наземных РЛС, поскольку условия работы аппаратуры на земле в стационарных условиях позволяют использовать резервирование, уменьшить диапазон климатических воздействий на оборудование, увеличить размеры антенн, защитить антенны от аэродинамических нагрузок, облегчить условия обслуживания аппаратуры. Потребители радиолокационной информации предъявляют к РЛС различные зачастую противоречивые требования, удовлетворить которым одновременно одна РЛС не может. Поэтому они дифференцируются по определенным группам в зависимости от функций различных служб, использующих информацию РЛС. Так существуют трассовые, аэродромные, посадочные, обзора летного поля, метеорологические и другие виды РЛС. В некоторых случаях разрабатываются радиолокационные комплексы (РЛК), совмещающие функции двух или большего числа видов радиолокационных станций.
Начало развития радиолокационных систем в России относится к тридцатым годам прошлого столетия. Непосредственным толчком к созданию радиолокационных методов обнаружения объектов послужило развитие военной авиации и возникновение в связи с этим необходимости заблаговременного обнаружения ВС противника. Этим объясняется и то обстоятельство, что основным заказчиком и потребителем радиолокационной техники и в нашей стране, и за рубежом были на первых этапах развития радиолокации различного рода военные ведомства.
Современный этап развития авиации характеризуется широким внедрением автоматизированных систем управления воздушным движением (АС УВД), использованием последних достижений вычислительной техники, более современных радиоэлектронных средств управления воздушным движением, навигации, посадки и связи, совершенствованием методов и средств технической эксплуатации авиационной техники.
Аналитический обзор аэродромных РЛС
Аэродромные обзорные РЛС (ОРЛ-А) предназначены для получения информации о воздушной обстановке, необходимой при контроле и УВД в районе аэродрома и для ввода ВС в зону действия посадочных средств. В нормах, принятых в ГА и выработанных постоянной комиссией по радиотехнической и электронной промышленности, ОРЛ-А обозначены ПРЛ-В2 и делятся на следующие классы: ПРЛ-В1 с Rmax=150 км; ПРЛ-В2 с Rmax=80 км и ПРЛ-В3 с Rmax=46 км.
Информация, получаемая с помощью аэродромных обзорных станций, используется диспетчерам аэродромных центров АС УВД, диспетчерских пунктов подхода (ДПП), главных диспетчерских пунктов подхода (ГДПП), диспетчерских пунктов круга (ДПК), диспетчерских пунктов системы посадки (ДПСП) и местных диспетчерских пунктов (МДП).
Технические характеристики аэродромных обзорных РЛС должны обеспечивать разрешающую способность и точность определения координат ЛА в соответствии с международными и отечественными нормами. Кроме того, они должны иметь эффективные средства подавления сигналов, отраженных от местных предметов и гидрометеоров. Аэродромные станции должны обнаруживать и определять местоположение целей, находящихся на небольших высотах и на близком удалении от РЛС. Требования к максимальной дальности действия аэродромных радиолокаторов дифференцируются в зависимости от конкретного назначения станции и класса аэропорта, где предполагается установить радиолокатор. Для большой интенсивности полетов необходимо использовать аэродромные обзорные радиолокаторы варианта "В 1" с дальностью действия ≈ 150 км.
В менее крупных аэропортах целесообразно устанавливать аэродромные радиолокаторы варианта "В 2" с максимальной дальностью действия ≈ 80 км. Для того чтобы обеспечить необходимой информацией диспетчера круга, достаточно в соответствии с рекомендациями ICAO иметь радиолокатор варианта "В 3" с дальностью действия ≈ 46 км.
Назначение, размещение и особенности аэродромных РЛС
Аэродромные диспетчерские радиолокационные станции предназначены для контроля и управлением воздушным движением в районе аэродрома и вывода воздушных судов в зону действия посадочного радиолокатора. Контроль и управление воздушным движением осуществляется на основе информации о дальности, азимуте, а также дополнительной информации о воздушных судах, получаемой с помощью радиолокационных станций и самолетных ответчиков. Эта информация должна быть полной и точной, в связи с чем аэродромные диспетчерские радиолокационные станции должны удовлетворять требованием международной организацией гражданской авиации ИКАО. Технические характеристики аэродромных РЛС должны обеспечивать разрешающую способность и точность определения координат ЛА в соответствии с международными и отечественными нормами. Кроме того, они должны иметь эффективные средства подавления сигналов, отраженных от местных предметов и гидрометеоров. Аэродромные станции должны обнаруживать и определять местоположение целей, находящихся на небольших высотах и небольшом удалении от РЛС.
Требования к максимальной дальности действия аэродромных радиолокаторов дифференцируются в зависимости от конкретного назначения станции и класса аэропорта, где предполагается установить радиолокатор.
Аэродромный РЛК располагается в сторону от оси ВПП, чтобы обеспечить минимум переотражений по вторичному каналу и ослабить влияние вредного СВЧ - излучения. Кроме того, нужно учесть, что вдоль ВПП на 120 м от оси проходит критическая зона КРМ, поэтому РЛС располагается за ее пределами (120-185м от оси ВПП, по возможности ближе к КТА).
Состав и размещение оборудования АОРЛ-85:
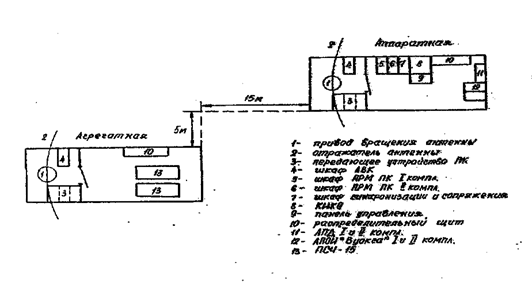
Аппаратура РЛК смонтирована в специальных контейнерах, имеющих все необходимые условия для работы аппаратуры и персонала (вентиляция, кондиционирование воздуха, освещение, пожарная и охранная сигнализация и т.д.), на позиции контейнеры монтируются в сборку из двух контейнеров, образуя единое техническое здание. Такое конструктивное решение сводит к минимуму строительно-монтажные работы на позиции. Двухлучевая антенная система с помощью специального перекрытия верхнего и нижнего лучей обеспечивает формирование зоны обзора в вертикальной плоскости в диапазоне углов от 0,5 до 45 градусов. Нижний луч, формируемый верхним облучателем и отражателем, работает как на передачу, так и на прием. Верхний луч работает только на прием. Использование информации верхнего приемного луча в ближней зоне позволяет снизить уровень помех от подстилающей поверхности примерно на 20 дБ. В горизонтальной плоскости зона обзора обеспечивается механическим вращением антенны со скоростью 12 или 15 об/мин. Зондирующие сигналы, формируемые двухканальной передающей системой, излучаются одновременно на двух несущихся на 56 Мгц, обеспечивая двухчастотный режим облучения цели. С целью обеспечения необходимого потенциала ПРЛ наряду с минимальной дальностью и высокой разрешающей способностью в каждом периоде повторения излучаются два зондирующих сигнала различной длительности: монохроматический и сложный с внутриимпульсной ЛЧМ. В состав приемной антенны входит аппаратура аналоговой и цифровой обработки сигналов, оценки параметров сигналов (карта помех), некогерентного и когерентного накопления, селекции движущихся целей, вычисления координат.
В ПРЛ организован специальный метеоканал. Прием метеоинформации в режиме работы при круговой поляризации осуществляется с ортогонального входа поляризатора верхнего облучателя антенны. Аппаратура приёма и обработки метеоканала идентична основному каналу. При работе в режиме линейной поляризации метеоинформация извлекается из нулевого доплеровского фильтра основного канала. Программно-вычислительное устройство ПРЛ производит вычисления координат ВС и формирует контуры метеооброзований в шести градациях.
Головной процессор РЛК производит объединение отметок ПРЛ и ВРЛ, трассы целей, выполняя, таким образом, функции вторичной обработки информации. Кроме того, он одновременно используется как процессор автоматизированной системы контроля и управления ЛРК. Вычислительные средства головного процессора имеют полное автоматическое резервирование и способны адаптироваться к перегрузкам.
Автоматизированная система контроля и управления (АСКУ) позволяет как с местного, так и дистанционного (например, с КДП) производить управление режимами работы РЛК, оценку технического состояния, диагностику неисправностей и автоматическую реконфигурацию комплекса (переход на резерв).
Встроенное контрольное оборудование позволяет осуществлять диагностику и поиск неисправностей до типового элемента замены. Высокая степень автоматизации РЛК наряду с его высокой надежностью обеспечивают возможность работы без постоянного присутствия на радиолокационной позиции обслуживающего персонала.
Нормативы ICAO для аэродромных РЛС
Зона обнаружения. Аэродромный радиолокатор должен обнаруживать ВС с эффективной отражающей площадью 15 м2 и более, находящихся в зоне прямой видимости (из точки расположения антенны) в пределах пространства, охватываемого вращением на 360 град вокруг вертикальной оси антенны плоской фигуры. В то же время нормами ICAO рекомендуется увеличить зону обнаружения.

Точность. Погрешность в определении положения отметки цели по азимуту не должна быть больше ±2 град.
Погрешность индикации дальности не должна превышать 5% от действительного расстояния до цели или 150 м в зависимости от того, какая из этих величин больше, т.е.: σmax r ≤ 0,05 r; σmax r ≥ 150 м, где r - наклонная дальность до цели.
Для новых РЛС, спроектированных после принятия норм ICAO, погрешность индикации дальности не должна превышать 3% от действительного расстояния до цели или 150 м и в зависимости от того, какая из этих величин больше.
Разрешающая способностьстанции по азимуту должна быть не хуже 4 град.
Разрешающая способность по дальности должна быть не хуже 1% расстояния от антенны радиолокатора до цели или 230 м в зависимости от того, какая из этих величин больше, т.е.: δr≤ 0,01 r; δr ≥ 230 м
Скорость возобновления информации. Информация о дальности и азимуте ВС, находящимся в пределах зоны обнаружения радиолокатора, должна возобновляться не реже, чем каждые 4 с.
Основные требования ИКАО для обзорных аэродромных радиолокаторов приведены в таблице 1.
Таблица 1.
| Характеристика | Рекомендации ИКАО |
| Максимальная дальность, км | 46 |
| Вероятность правильного обнаружения | 0,9 |
| Вероятность ложных тревог | 10-6 |
Эквивалентная площадь цели, м2 | 15 |
| Угол места, градус | 0,5-30 |
| Скорость обзора, об/мин | 15 |
Разрешающая способность: по дальности, м по азимуту, градус | 230 или 1% от Rmax 4 |
Погрешность измерения (СКП) дальности: по индикатору (после цифровой обработки), м | 150 или 0.03% от Rmax |
Точность азимута по индикатору, градус | 2 |
Коэффициент подпомеховой видимости, дБ 1 этап | Максимальный |
Подобные работы:
Разработка PIC-контроллера устройства измерения временных величин сигналов
Разработка блока определяющего длительность стимулирующего импульса для аппарата электроанальгезии
Разработка блока управления фотоприёмником для волоконно-оптических систем передачи информации
Разработка детектора высокочастотного излучения