Оптимізація параметрів динамічної системи підресорювання корпуса БТР
ВСТУП
Розвитку бронетранспортерів (БТР) в останні часи приділяється значна увага у багатьох країнах. Хоча на розробку машин цього класу значний вплив має конструкція танків, однак розвиток деяких властивостей БТР йде своїми шляхами, що витікає із призначення та особливостей їх бойового застосування.
Бронетранспортери отримали достатньо широке застосування вже під час другої світової війни. Вони використовувались в мотопіхотних підрозділах, для розвідки, встановлення на них різного озброєння, в тому числі й зенітного, транспортування гармат та розташування боєприпасів на самому бронетранспортері, в якості штабних та різних спеціальних машин. За типом рушія розрізняють бронетранспортери колісні, гусеничні та напівгусеничні.
Гусеничний рушій забезпечує простоту конструкції в цілому, високу проходимість в різних умовах руху та значну живучість на полі бою. Але він значно поступається колісному рушію по терміну роботи та коефіцієнту корисної дії, що відображається на витраті палива, запасі ходу та потребує максимальної потужності двигуна.
Колісний рушій, крім того, працює безшумно та дозволяє рухатись по штучним дорогам. Важливою обставиною при використанні колісного рушія на БТР є також наявність широкої виробничої бази – автомобільної промисловості.
За сучасними поглядами, БТР повинні бути пристосовані до руху через ділянки радіоактивного, хімічного та бактеріального зараження місцевості.
Для підвищення рухливості військ необхідно, щоб БТР був плаваючим та авіа транспортабельним.
Також дуже важливою особливістю БТР є його здатність ефективно вирішувати бойові завдання в будь-яких дорожніх умовах. При русі по шосе бронетранспортер розвиває максимальну швидкість 90 км/годину. Його прохідність на пересіченій місцевості близька до прохідності гусеничної машини. Тому велике значення мають властивості й характеристики підвіски.
Підвіска колісної машини виконує одночасно кілька важливих функцій, від її конструкції й робочих характеристик залежать керованість, стійкість та плавність ходу. Так, на динамічність, стійкість і керованість колісної машини впливають кінематичні характеристики підвіски. Надійність багато в чому залежить від надійності коліс і підвіски, тому що вони знаходяться ближче всього до дороги й піддаються найважчим умовам експлуатації. Від властивостей підвіски залежить фізіологічний й емоційний стан водія й пасажирів, оскільки вібрації, швидкі й різкі зміни положення тіла сильно стомлюють людину, відомо, що утома прямо залежить від змін прискорення й частоти коливань. Також від властивостей підвіски залежіть ефективність ведення вогню з ходу, що є однією з найголовніших задач БТР.
Основна проблема конструювання підвісок полягає в тому, що вимоги до підвіски з боку стійкості, керованості й комфортності виявляються суперечливими. Так, з одного боку, підвіска повинна бути по можливості більше м'якої, щоб виключити відрив коліс від дорожнього полотна при наїзді на нерівність, а також збільшити комфортність автомобіля для пасажирів і водія, забезпечити якість перевезених вантажів. З іншого боку, підвіска повинна бути по можливості більш жорсткою, щоб збільшити стійкість і керованість колісної машини, а саме - щоб не виникали небезпечні крени на поворотах, не було різких коливань корпуса при розгоні й гальмуванні, при швидкому руху по пересічної місцевості.
Властивості підвіски визначаються її характеристиками, основні з яких описують пружність пружини й в'язкість амортизатора залежно від різних фаз їхнього руху. У більшості звичайних автомобілів характеристики підвіски вибираються в результаті пошуку компромісу між суперечливими вимогами стійкості, керованості й комфортності. Характеристики підвіски оптимізують з погляду середньостатистичних умов, у яких буде працювати даний автомобіль. Розраховується усереднене значення маси автомобіля з урахуванням можливої ваги його вантажу, оцінюється й ураховується характер й якість дорожнього покриття тих доріг, для яких розробляється даний автомобіль, вимоги до динамічних властивостей даного автомобіля, що залежать від його призначення. Характеристики таких підвісок не змінюються в процесі експлуатації автомобіля, якщо не вважати на зміни, пов'язані із зносом деталей підвіски.
Однак очевидно, що підвіска, оптимізована у всьому діапазоні умов експлуатації БТР, виявляється неоптимальною в кожній з конкретних поточних дорожніх ситуацій, що відрізняються від розрахункової середньостатистичної. Так, при русі колісної машини по порівняно гладкій дорозі оптимальної є більше жорстка підвіска, при русі цього ж автомобіля по нерівній дорозі хотілося б, щоб підвіска ставала більш м'якою. При русі по прямій ділянці дороги можна мати більш м'яку підвіску, що збільшує плавність ходу, а при проходженні поворотів, при розгоні й гальмуванні підвіска повинна ставати більш твердою, щоб забезпечити стійкість автомобіля, не допускати великого крену, тим більше - перекидання. Хотілося б також змінювати твердість підвіски при зміні ваги вантажу. Є й багато інших факторів, від яких можуть залежати бажані оптимальні в поточних умовах характеристики підвіски (прискорення автомобіля, радіус повороту й т.п.).
Вже давно були проведені спроби конструювання підвісок, які дозволяли б керувати їхніми характеристиками вручну або автоматично. Наприклад, водієві надається можливість налаштовувати підвіску перед виконанням конкретної поїздки відповідно до її планованих властивостей. Так, у деяких автомобілях можна змінювати висоту кліренсу (дорожнього просвіту), або жорсткість підвіски, вибираючи із двох-трьох варіантів - спортивного (жорстка підвіска) або звичайного (м'яка підвіска). Так само існують варіанти систем керування які працюють на основі електронних схем або контролерів, що реалізують значення параметрів підвіски по деякому детермінованому закону. Такі системи вимагають оснащення підвіски певними датчиками, і виконавчими пристроями. Контролер встановлює фіксоване відображення показників датчиків у заздалегідь визначені команди виконавчим пристроям, що реалізують указані значення параметрів підвіски. Очевидно, що таким способом можна реалізувати набагато більш складні детерміновані закони керування, чим за допомогою механічних і гідравлічних пристроїв. Такого роду системи можуть керувати підвіскою швидше, чим це може робити людина-водій, і можуть робити це більш точно.
Подальший розвиток різних систем керування характеристиками підвіски автомобіля і їхній синтез дозволить одержувати від автомобіля все можливе, незважаючи на стан доріг або їхню відсутність і так само дасть можливість водієві і його пасажирам більш комфортно пересуватися на транспортному засобі.
1.ОПИС ОБ'ЄКТА КЕРУВАННЯ
З тих пiр, як людство почало воювати люди намагалися захистити себе та засоби пересування. Найшвидша доставка військ до місця бою була однією з основних умов перемоги над противником.
В античності на бойові колісниці встановлювали щити. Вразливі місця бойових слонів перської армії так само були захищені. Біля десяти років тому на археологічних розкопках у Монголії був знайдений броньований візок, що належить, імовірно, Чингіз - Ханові. По сучасних мірках його броня досить тонка, але стріли й списи він витримував прекрасно. У Середні Віка солдати й наїзники захищали залізним панциром не тільки себе, але й своїх коней.
Завдяки розвитку техніки ситуація змінилася тільки наприкінці XІ століття, а на початку XX в. на "стежку війни" виходить броньований автомобіль.
З початком Першої світової війни військам потрібна була легкоброньована техніка, у зв'язку з тим, що більшість атак піхоти захлиналися в кулеметних чергах. Арміям був потрібен транспортний засіб високої прохідності, що мав би гарну маневреність на полі бою та спроможній, незважаючи на вогонь супротивника, з мінімальними втратами доставляти збройну піхоту прямо до переднього краю. Для рішення подібних завдань, військовим транспортерам поряд з забезпеченням високої прохідності, необхідно було й бронювання. До цього ж часу в тактиці ведення бойових дій відбулися кардинальні зміни, що досягли свого логічного завершення в роки Другої світової війни - бойові дії прийняли ви- сокоманеврений характер, крім того, майже в усіх операціях передбачалась участь танкових підрозділів, тісно взаємодіючих з піхотою. У цій ситуації доставляти бійців на поле бою у звичайних вантажівках вже не представлялося можливим - їхня прохідність не дозволяла рухатися безпосередньо за танками по пересіченій місцевості, крім того, солдати, перебуваючи у відкритих кузовах, не були захищені від вогню супротивника.
Перевезення піхоти безпосередньо на броні танків, крім своєї незручності не вирішувала проблеми по тій же причині. Арміям гостро була потрібна бойова машина здатна перевозити бійців під захистом броні. І такі машини з'явилися – к кінцю 1930- х років у світі почав складатися новий тип бойової техніки - бронетранспортер (БТР).
На полі бою бронетранспортер з'явився в ході Другої світової війни й з тих пір став незмінним супутником піхоти. Крім того, виявилось, що бронетранспортери зручно використовувати й в обороні, для охоронної служби, ведення розвідки й при перекиданнях військ на великі відстані. Таким чином, бронетранспортер виявився універсальною бойовою машиною.
Після закінчення Другої світової війни радянські конструктори активно прийнялися створювати різні види колісної й гусеничної бронетехніки призначеної для перевезення й прикриття піхоти, мінометних і артилерійських розрахунків, військ зв'язку й забезпечення. Так на початку 1980- х років після успішних заводських і державних випробувань на озброєння Радянської Армії був прийнятий бронетранспортер БТР-80, розроблений у КБ ГАЗА під керівництвом И.С.Мухіна й Е.М.Мурашкіна. Підприємством - Виробником був визначений АМЗ - Арзамаський машинобудівний завод. Перший серійний БТР-80 покинув заводські цехи 24 лютого 1984 року.
Бронетранспортер БТР-80 являє собою бойову колісну плаваючу машину, що володіє озброєнням, броньовим захистом і високою рухливістю. Він призначений для використання в мотострілкових підрозділах сухопутних військ. Бронетранспортер БТР-80 обладнаний десятьма посадковими місцями для розміщення відділення в складі командира відділення (машини), механіка водія, навідника й сьоми мотострелків. У башні бронетранспортера розміщається кулеметна установка, що складається з 14, 5-мм і 7, 62-мм кулеметів. У корпусі є люки для стрілянини з автоматів. Для забезпечення внутрішнього зв'язку між членами екіпажу бронетранспортер укомплектований переговорним пристроєм. На машині застосовані пристрої, призначені для захисту екіпажа, десанту й внутрішнього обладнання від впливу ударної хвилі й проникаючої радіації при вибуху ядерних боєприпасів, для захисту від хімічної й біологічної зброї, а також для захисту від радіоактивного пилу при русі машини по радіоактивно зараженій місцевості. Бронетранспортер - чотиривісна, восьмиколісна машина з усіма ведучими колесами, здатна пересуватися за танками, переборювати з ходу окопи, траншеї й водні перешкоди. БТР-80 обладнаний системою запуску димових гранат для постановки димових завіс із метою маскування.
Для гасіння пожежі в машині є протипожежне обладнання. Бронетранспортер пристосований для авіа транспортування. По розміщенню обладнання усередині машина умовно розділена на три відділення: керування, бойове, силове відділення
Відділення керування розташоване в передній частині машини. В ньому розміщуються місця командира відділення (машини) та механіка-водія. Перед сидінням механіка-водія знаходиться кермове колесо та педалі подачі палива, гальма та зчеплення. Поряд з сидінням знаходиться важіль перемикання передач, важіль стояночного гальма, кран керування підкачкою шин з показником тиску, розподілювач керування гідроприводом навісного обладнання ( хвилевідбивний щит, заслонка водомету). Також там знаходяться всі контрольно-вимірювальні прилади: спідометр, тахометр, показник тиску масла в двигуні, показник температури охолоджуючої рідини, показники кількості палива, пульт керування протипожежним обладнанням (ППО) та колективним захистом, перемикачі керування електрообладнанням та запобіжники. Позаду на спинці сидіння закріплена сумка з документацією машини. Перед сидінням командира знаходиться радіостанція, під сидінням – підігрівач.
Бойове відділення складає об’єм корпусу машини від спинок сидінь командира та механіка-водія до перегородки відділення силової установки. В бойовому відділенні розташовуються кабіна баштового модулю, що обертається з місцем оператора та місця для розташування десанту. В цьому відділенні розташовуються: на бокових стінках – місця для вкладання особистої зброї, додаткового комплекту патронів до кулемету, укладка двох протитанкових керованих ракетних снарядів (ПТКРС); на полу – домкрати, аптечка для ремонту шин; на моторній перегородці – медична аптечка, рятівні жилети членів екіпажу, гачки для кріплення речових мішків, коробки з боєкомплектом для гранатомета, вимикач маси, інструментальний ящик, баки з питною водою. Під сидінням знаходяться калоріфери, а між сидіннями роздаточна коробка.
Відділення силової установки розташоване в задній частині корпусу та ізольоване від бойового відділення герметичною перегородкою. В ньому знаходиться двигун, системи, що його обслуговують (системи живлення паливом, киснем, змащення, охолодження, випуску відпрацьованих газів), паливні баки, корпус водомету та коробка передач зі зчепленням.
Корпус і башня машини служать для розміщення екіпажу та десанту, озброєння, агрегатів і механізмів і для захисту їх від поразки вогнем стрілецької зброї. Корпус являє собою жорстку конструкцію, зварену зі сталевих броньових листів. Він складається з носової частини, бортів, кормової частини, даху й днища. У носовій частині розташований люк лебідки, хвилевідпромінюючий щит, оглядові люки. По бортах корпуса є амбразури, бортові двері десанту, люк доступу до ФВУ. У кормовій частині корпуса розташована заслінка водометного рушія, кришки заправних горловин паливних баків. На кришці корпуса є люк командира, люк механіка водія, виріз баштової установки, верхні люки бойового відділення, люки над силовою установкою. У днищі машини є вхідний отвір водометного рушія й отвору для зливу експлуатаційних матеріалів із систем двигуна й вузлів трансмісії. Башня бронетранспортера - конусоподібної форми, зварена зі сталевих броньових аркушів. Вона встановлена на кульковій опорі над вирізом у підбашеному листі даху корпуса машини. У передній частині башні є амбразура для установки спарених кулеметів. Двигун - дизель, чотиритактний, 8 - циліндровии, V- Образний, з турбокомпресорним наддувом, рідинного охолодження. Потужність двигуна - 260 л.с. На машині може бути встановлений такий же двигун, але без турбокомпресорного наддуву потужністю 210 л.с. У системі живлення БТР-80 застосовується дизельне паливо. Система змащення - комбінована під тиском і розбризкуванням, з "мокрим" картером (тобто нижня частина картера двигуна є ємністю для масла).
Масло в систему заправляється через заливну горловину картера двигуна й перевіряється щупом. Заправна ємність системи - 28 л. Система охолодження - рідинна, вентиляторна, закрита, із примусовою циркуляцією охолоджувальної рідини. Система полегшення пуску двигуна складається із двох частин: електрофакельного пристрою й підігрівника. Електрофакельний пристрій призначений для підігріву повітря у впускних трубопроводах двигуна під час його пуску. Підігрівник служить для підігріву охолоджувальної рідини в умовах низьких температур. Підігрівник змонтований на двигуні машини. Трансмісія БТР-80 - механічна, ступінчата. Вона складається з наступних агрегатів і вузлів: головного фрикціона, коробки передач, роздаточної коробки, карданних передач, мостів, колісних редукторів, вузлів приводу насоса водомета, вузлів приводу лебідки. Головний фрикціон - "сухий", двухдисковий, з тертям сталі по фрикційному матеріалу, з гідравлічним приводом керування. Коробка передач - механічна, п'ятиступінчата, з механічним приводом керування. Ходова частина складається з колісного рушія й підвіски. Колісний рушій складається з восьми ведучих коліс. Колеса знімні, з рознімним ободом. Шини безкамерні, з регульованим тиском. Підвіска - незалежна, торсіонна, з гідравлічними телескопічними амортизаторами. Водохідний рушій БТР-80 являє собою один водомет з осьовим насосом, розташований у кормовій частині машини. Керування колісним рушієм і водометом здійснюється за допомогою кермового механізму. Поворот машини при русі на суші здійснюється поворотом коліс двох передніх мостів, а на плаву - одночасним поворотом водяних рулів, заслінок і коліс. Кермовий механізм - механічний, з гідравлічним підсилювачем. Бронетранспортер може транспортуватися вантажними літаками Мул-76 і АН-22.
Таблиця 1.1 Транспортно - технічні характеристики БТР-80
| ТТХ БТР-80 | |
| Бойова маса, т | 13,6 |
| Довжина, ширина, висота, м | 7,6х2,9х2,3 |
| Кулемети | спарений 14,5 мм; 7,62 мм зенітний |
| Максимальна швидкість по шосе, км/год | 80 |
| Максимальна швидкість на плаву, км/год | 9 |
| Запас ходу по шосе, км | 600 |
| Двигун | восьмициліндровий багатопаливний дизель |
| Потужність двигуна | 260 л.с. (191 кВт) |
| Трансмісія (число передач КП) | 5/1 |
2 ОГЛЯД СИСТЕМ КЕРУВАННЯ ПІДВІСКОЮ ТА ЇХНІЙ РОЗВИТОК
2.1 Розвиток керованих підвісок
Інтерес до підвісок з регульованими параметрами виник давно. Три найпоширеніших пружних елементи: пружина, торсіон і ресора, маючи лінійні характеристики опору навантаження, не забезпечували необхідну комфортабельність порожнього й навантаженого автомобіля, а до того ж мали обмежену енергоємність, що знижує швидкість і прохідність машини в різних дорожніх умовах (1).
Застосувати замість пружин стиснене повітря як пружний елемент на легковому автомобілі спробували ще 77 років тому. В 1931р. з'явився автомобіль “Ricotti” з резинокордними балонами замість кручених пружин у передній підвісці. Причому кожен такий елемент складався із чотирьох секцій. Подальші експерименти, проведені в 30-40-х роках рядом фірм, успіху не принесли.
Однак в 1953р. корпорація General Motors першою у світі освоїла випуск міських автобусів на пневмопідвісці. Тут зіграла роль та обставина, що вимога сталості висоти кузова автобуса над дорогою іншими засобами виконати не вдавалося. Першим легковим автомобілем масового виробництва на пневматичній підвісці був “Citroen DS19”, випуск якого почався в 1955 р. Ніби у відповідь на цю винятково вдалу конструкцію, в 1956 р. американська компанія “Packard“ запропонувала модель із регульованою підвіскою, у якій жорсткість торсіонів змінювалася в результаті їхнього закручення електродвигунами (9).
З 1957 р. пневмопідвіски стали замовленим обладнанням на легкових автомобілях багатьох фірм США, а в 1961р. почалося виробництво моделі MercedesBenz 300 SE, також із пневмоелементами замість гвинтових пружин. Але йшли роки, і інтерес до цього дорогого й ненадійного пристрою згас. Через тридцять років він відродився у зв'язку з розробкою й впровадженням у життя електронних керуючих систем, що замінили механічні регулятори. Крім того, саме вдосконалювання конструкції автомобіля підштовхнуло фахівців до того, щоб знову розгорнути роботи з регульованих підвісок. Їхня актуальність обумовлена й масовим переходом на передній привід (як відомо, при такому компонуванні навантаження на задню вісь змінюється в значних межах), і збільшеними швидкостями руху по автомагістралях. З'явилася потреба змістити центр ваги автомобіля вниз і підвищити за допомогою електроніки здатність машини опиратися крену на поворотах.
2.2 Огляд існуючих систем керування підвіскою
2.2.1 Система Hydractive
Законодавцями «моди» на інтелектуальні підвіски стали конструктори «Citroen», що вперше використали гідропневматичні пружні елементи в моделі DC-19 (серійний випуск якого почався в 1955 р.). У верхній частині її стійок замість пружин установлена сфера, що усередині розділена мембраною на дві частини. Угорі перебуває стиснений газ, а знизу - рідина. Камера зі стисненим газом працює як пневматичний пружний елемент, а рідина служить для передачі зусилля до мембрани. Клапани в гідравлічній частині дозволяють реалізувати функції амортизатора. Принципова схема гідропневматичної підвіски представлена на Рисунку 2.1.
Згодом така схема підвіски застосовувалася на більшості автомобілів марки «Citroen» й увесь час вдосконалювалася. Схема передньої підвіски автомобіля Ситроен представлена на Рисунку 2.2. На ньому добре видна конструкція передньої підвіски McPherson і рейкового рульового керування. Всі деталі й вузли змонтовані на підрамнику. У верхній частині стійок - «сфери» із стислим азотом.
. 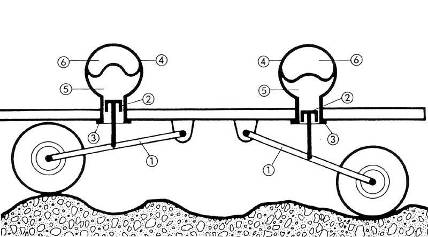
1-важіль підвіски; 4 — «Сфера»;
2-поршень гідроциліндра; 5-масло LHM;
3-корпус гідроциліндра; 6 – стислий азот.
Рисунок 2.1. - Принципова схема гідропневматичної підвіски
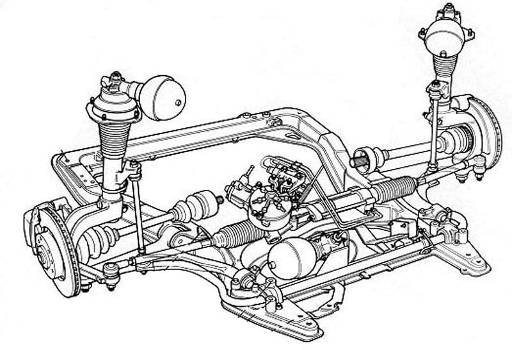
Рисунок 2.2- Схема передньої підвіски автомобіля «Ситроен»
Сфера входить до складу так званого пружнього елемента (Рисунок.2.3), що складається з відкритого знизу циліндра, у якому ковзає поршень із відносно довгою спідницею. У верхній половині сферичної частини перебуває стислий азот, що робить амортизуючу роботу. Для запобігання вспінюванню зазначена газова порожнина відділена мембраною від рідини, що заповнює нижню півкулю й циліндр. Сили передаються штовхальником, що вгорі має сферичне з'єднання з поршнем, а внизу опирається на поперечний важіль передньої підвіски або поздовжній важіль задньої. При ході стиску рідина продавлюється поршнем через клапан амортизатора, а при ході відбою газ продавлює стовп рідини через клапан назад униз. Для більшого ходу пружні елементи встановлюють в осі повороту важеля, збоку від якого кріпиться штанга стабілізатора. Стабілізатори як передньої, так і задньої підвісок мають великий діаметр і запобігають надмірному бічному крену кузова.
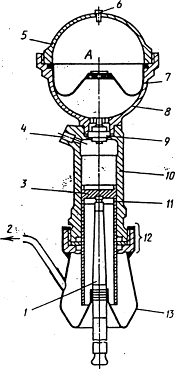
Рисунок 2.3 - Компактний пружний елемент, установлюваний фірмою «Ситроен» у передній і задній підвісках автомобіля
На Рисунку 2.3 умовно позначені наступні компоненти: А - азот; 1 - штовхальник; 2 - повернення витоків; 3 - поршень; 4 - підведення рідини; 5 - верхня півкуля; 6 - пробка наповнювального отвору; 7 - мембрана; 8 - нижня півкуля; 9 - амортизатор; 10 - циліндр;11 - сухар; 12 - ущільнювальний комплект; 13 - ущільнювальний чохол.
В 1989 році на міжнародний ринок надійшов «Ситроен ХМ» із системою електронного керування підвіскою-Hydractive. Її відмінна риса - миттєве регулювання характеристик підвіски (робота в «жорсткому» й «м'якому» режимах). «Комфортний» режим забезпечує комфортабельність і зручність керування. При цьому підвіска має більшу гнучкість і помірну амортизацію. «Спортивний» режим поліпшує стійкість автомобіля й безпеку. Підвіска в цьому випадку характеризується меншою гнучкістю, але краще захищає пасажирів і водія від несприятливих впливів хитання, поштовхів і ривків на нерівній дорозі.
Для керування жорсткістю підвіски, на додаток до звичайного «сфері» й амортизуючого клапану на колесо, додано ще по одній допоміжній «сфері», установленій на регуляторі твердості. (Рисунок. 2.4)
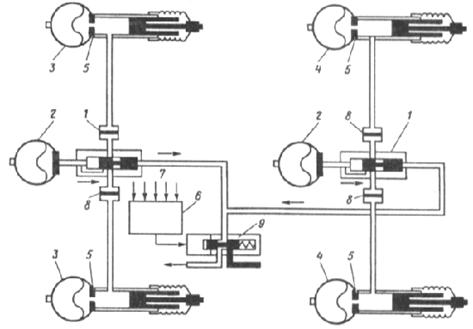
Рисунок 2.4 - Схема керування жорсткістю підвіски
На Рисунку 2.4 1 - регулятор твердості; 2 - додаткові гідропневматичні балони; 3 й 4 - гідропневматичні балони відповідно переднього й заднього мостів; 5 й 8 - відповідно основні й додаткові гідроамортизатори; 6 - мікропроцесор; 7 - датчики; 9 - електроклапан
Якщо до гідропневматичного елемента додати ще один гідропневматичний балон і гідроамортизатор, то збільшується його гнучкість (більше обсяг газу, а отже, знижується амортизація (рідина проходить через два отвори). Це - «м'який» режим роботи підвіски.
Підвіска переводиться в «спортивний» режим у результаті відключення гідроамортизатора краном (регулятор жорсткості). При цьому зменшується її гнучкість (менше обсяг газу), отже, збільшується амортизація (рідина проходить через один отвір).
Електронне керування регулятором жорсткості здійснює мікропроцесор 6 , що одержує інформацію від датчиків 7 кута повороту й кутової швидкості кермового колеса, положення дросельної заслінки, тиску в гальмовій системі, крену кузова, швидкості автомобіля.
У пам'ять мікропроцесора закладений ряд граничних параметрів та їхніх сполучень, отриманих на основі тривалих випробувань автомобілів. Ці дані порівнюють із одержуваної від датчиків інформацією, і мікропроцесор вибирає відповідний режим підвіски. Причому гідравлічна система включається негайно (час спрацьовування менш 0,05 с), випереджаючи динамічну реакцію автомобіля, що особливо важливо при швидкій їзді по звивистій дорозі.
По командах мікропроцесора регулятор жорсткості за допомогою електроклапана 9 підключає або відключає третій гідропневматичний балон, вибираючи режим підвіски.
«М'який» режим підвіски: при підключеному живленні електроклапан відкриває доступ до високого тиску з головного акумулятора в трубки живлення регуляторів жорсткості. При цьому тиск у робочій системі дорівнює тиску в головному акумуляторі. Золотник регуляторів жорсткості з'єднує три гідропневматичних балони. Рідина циркулює від гідроциліндрів підвіски до балонів через гідроамортизатори та назад.
«Спортивний» режим підвіски: при відключеному живленні електроклапан 9 закритий, трубки живлення регуляторів жорсткості з'єднані, рідина циркулює з поверненням у бак. При цьому тиск дорівнює нулю. Золотник регуляторів жорсткості перебуває в положенні, що перешкоджає проходженню рідини між двома основними й додатковими гідропневматичними балонами.
Робота підвіски залежить від одержуваної від датчиків інформації й переробки її мікропроцесором, що при виявленні якого-небудь відхилення (від попередньо уведених даних) подасть команду на перехід в «спортивний» режим.
Датчик кута повороту й кутової швидкості кермового колеса інформує про досягнення граничних значень цих параметрів. У цей момент відбувається перехід в «спортивний» режим. Підвіска залишається в даному режимі доти, поки кут повороту кермового колеса не буде нижче граничного значення. У результаті хитання зменшується й сповільнюється з однієї сторони завдяки переходу підвіски в «спортивний» режим, з іншого боку - припиненню сигналів елементів підвіски правого й лівого бортів.
Датчик тиску в гальмівній системі інформує про досягнення еталонного його значення, коли відбувається перехід в «спортивний» режим. Підвіска залишається в такому режимі до падіння тиску нижче заданої межі.
Датчик крену (коливання) кузова реєструє поворот торсіонного вала. Перехід в «Спортивний» режим відбувається при досягненні певного рівня крену кузова.
Датчик швидкості автомобіля інформує про її значення, коли необхідно визначити дані, застосовувані при переході в «спортивний» режим по сигналах інших датчиків, а також для забезпечення більшої чутливості до повороту кермового колеса на великій швидкості або до крену (коливанню) кузова на малій швидкості руху автомобіля.
На панелі приладів розташовані перемикачі, за допомогою яких водій може вибрати одну із двох програм: SPORT або AUTOMATIC.
При роботі із програми SPORT напруга на електроклапані відсутня. Підвіска працює в «жорсткому» режимі. Однак при розгоні для зрівняння тиска в елементах підвіски обох мостів автоматично міняється режим. У режимі AUTOMATIC живлення подане на електроклапан. Підвіска працює в «м'якому» режимі. Але залежно від зчитаної датчиками інформації мікропроцесор видає або не видає команду на перехід в «жорсткий» режим. У результаті є можливість забезпечення комфорту більшої частини шляху й тимчасовий перехід в «жорсткий» режим при відповідних умовах.
2.2.2 Безперервне керування демпфуванням (CDC)
Цю систему активно застосовує фірма Opel на своїх останніх версіях автомобіля Astra. В основу електронної системи керування демпфіруванням входять чотири двухтрубних амортизатори з газовим підпором і регульованими електромагнітними клапанами. Вони встановлені збоку в нижній частині амортизатора й усередині самого поршня, безупинно й точно управляють характеристиками амортизаторів з урахуванням стану дорожнього покриття, індивідуального стилю водіння, швидкості, вертикального прискорення кожного колеса, кута повороту керма.
Система CDC використовує принцип «Skyhook». Принцип «Skyhook» полягає в тому, щоб підтримувати кузов у максимально стійкому стані за рахунок змінного демпфірування, незалежно від умов руху. Для цього, система використовує як опорну крапку «так би мовити» уявну віртуальну площину (наприклад небо над автомобілем), що зберігається як обчислювальна модель у блоці керування системи CDC. Ціль полягає в тому, щоб утримувати кузов автомобіля наскільки це можливо горизонтально, щодо цієї площини. Всі вертикальні переміщення компенсуються в максимально можливому ступені приведенням у дію амортизаторів. На підставі сигналів від датчиків прискорення керуючий модуль системи CDC у режимі реального часу за допомогою спеціальної матриці параметрів розраховує оптимальні характеристики амортизаторів для кожного окремого колеса. Компоненти системи (CDC) показані на Рисунку 2.5.
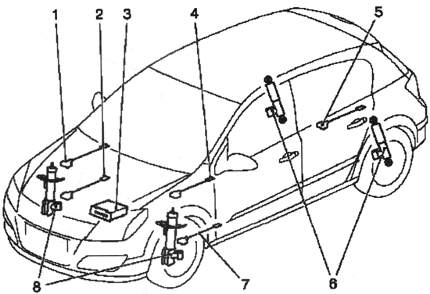
Рисунок 2.5 - Розташування компонентів системи (CDC)
На Рисунку 2.5 позначені наступні компоненти системи (CDC): 1 — передній правий датчик на кузові (прискорення кузова); 2 — правий датчик пружинної стійки (прискорення колеса);3 — блок керування CDC; 4 — передній лівий датчик на кузові (прискорення кузова); 5 — задній датчик на кузові (прискорення кузова); 6 — задній амортизатор CDC; 7 — лівий датчик пружинної стійки (прискорення колеса); 8 — передня пружинна стійка CDC
2.2.3 Магнітний контроль переміщення (MRC)
Трохи інший підхід застосувала фірма Delphi. В амортизаторах цієї фірми використана технологія MRC (Magnetic Ride Control - магнітний контроль переміщення), у ній відсутні вище описані способи регулювання характеристик. В основі цієї технології стоїть магнито-реологічна рідина, що працює як звичайне масло, але в ній утримуються магнітні частки із спеціальним покриттям, що перешкоджає їхньому злипанню. Розмір цих часток – трохи більше мікрона, і їхня кількість у рідині близько 30% від усього обсягу. Зміну перетерпів і сам амортизатор. Тепер у його поршень убудований електромагніт, струм у якому змінює окремий контролер, а проведення до поршня йдуть усередині штока. Контролер посилає струм на котушку, що створює магнітне поле. Під дією поля магнітні частки вибудовуються «у лінію», тим самим збільшуючи в'язкість масла в області отворів. Тому такий амортизатор працює тихіше, структура масла більше «однорідна», а не «скуйовджена», як у звичайних амортизаторах. Час реакції менше, ніж в описаних вище електронних системах, приблизно в 10 разів. І характеристики міняються не східчасто, як у випадку з FSD, а постійно залежно від ходу підвісок, швидкості обертання коліс, положення кермового колеса й температури самого масла.
2.2.4 Система пневматичного підресорювання
Фірма «Міцубісі» в 1984 році випустила «Галант - ройал». Це передньопривідний автомобіль, що має позаду підвіску зі зв'язаними важелями, а попереду підвіску на напрямних пружинних стійках. На відміну від інших конструкцій, тут в обох підвісках усередині пружин розміщений частково несучий пневматичний елемент. Він складається з допоміжної порожнини й пневматичного діафрагменого балона, що відкривається по корпусі стійки й має усередині звичайний гумовий додатковий пружний елемент. У верхній частині цього вузла змонтований електропневматичний клапан, що може перемикати підресорювання з «м'якого» на «жорстке» (8).
При різких поперечних кренах кузова або при інтенсивному розгоні, або раптовому гальмуванні сенсор пускає в хід цей клапан й у частки секунди здійснюється поворот керуючої штанги, розміщеної усередині порожнього штока. За допомогою золотника штанга перекриває постійний дросель у клапані амортизатора, а також перекриває з'єднання між допоміжною порожниною й пружним пневмобалоном. На Рисунку 2.6 наведений розріз по пружині й вузлу пневматичного підресорювання.
Амортизатор працює по двотрубній схемі; між основними допоміжними клапанами перебуває постійний дросель, що перекривається поворотним золотником при перемиканні з м'якого регулювання на жорстке. Тоді амортизаторна рідина додатково протікає через допоміжний клапан і демпфірування підвищується.
У цей час пружна робота відбувається тільки цим балоном, так що при «жорсткому» регулюванні жорсткість підвіски зростає приблизно на 50 %. Внаслідок чого зменшуються бічні й поздовжні крени кузова. Цьому сприяє також підвищення демпфірування, що становить приблизно 15%.
Перемикання з м'якого регулювання на тверде може відбуватися автоматично або вручну.
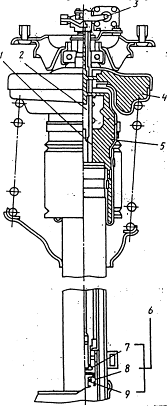
Рисунок 2.6 - Розріз по пружині та вузлу пневматичного підресорювання
На рисунку 2.6 прийняті наступні позначення:
1-шток; 6-клапан амортизатора;
2-керуюча штанга; 7-основний клапан;
3-елемент керування; 8-запасний. клапан;
4-допоміжна порожнина; 9-допоміжний клапан;
5-пневмобалон;
2.2.5 Система керування активною гідравлічною підвіскою, розроблена фірмою «Лотус»
Фірмою «Лотус» була розроблена підвіска, що встановлювалася на автомобілях «Формула I». Основою всієї системи був гідронасос, що приводиться у дію від одного з распредвалів.
З п'яти прецизійних клапанів змінювання застосовуваної пропускної здатності, один клапан приєднаний до насоса, а чотири - обслуговують пружні елементи коліс. Виконуючи роль інтерфейсу між електронікою й гідравлікою, клапани по команді змінюють твердість гідроелемента. Гідравлічний акумулятор підтримує тиск у системі на крутих поворотах, коли оберти двигуна різко падають. Він з'єднаний трубками високого тиску з гідравлічними пружними елементами кожного колеса.
На Рисунку 2.7 наведений приклад функціональної схеми активної гідравлічної підвіски.
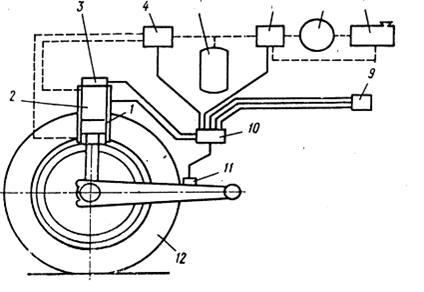
1 – датчик положення поршня в гідроциліндрі; 2 – гідроциліндр колеса;3 – датчик тиску; 4,6 – сервоклапана; 5 – ресивер; 7 – насос; 8 – масляний бак; 9 – д