Применение робототехники в хирургии. Преимущества и недостатки системы Да Винчи
Проведение хирургических операций с помощью роботов уже не является сюжетом из научно-фантастического произведения. Использование их в клинике стало не просто возможным, но и весьма перспективным. Хотя у большинства людей "робот" ассоциируется с именем Айзека Азимова, первым этот термин ввел чешский писатель Карел Чапек для обозначения механизма, обладающего так называемыми антропоморфными свойствами. На производстве и в научных исследованиях применяются промышленные роботы - программно-управляемые автоматические манипуляторы, выполняющие рабочие операции со сложными пространственными перемещениями. Доктор Davies в своей работе, посвященной достижениям робототехники, дал следующее определение для робота, используемого в хирургических целях: "… управляемая система, наделенная чувствительностью и запрограммированная для выполнения движений и манипулирования инструментами при проведении хирургических операций".
На данный момент роботов, используемых в хирургии, можно разделить на пассивных, полуактивных и активных.
Пассивный робот предназначен, как правило, для удержания инструмента в определенном положении, что облегчает выполнение и увеличивает точность какого-либо этапа оперативного вмешательства. Изменять положение инструментов система может только с помощью хирурга. Примером может служить использование робота для удержания иглы при проведении биопсии в нейрохирургии. Полуактивный робот выполняет ряд запрограммированных манипуляций, в определенной последовательности осуществляя движения в различных направлениях и плоскостях. Такой робот используется, например, для протезирования коленного сустава. Активный робот оснащен манипуляторами, подобными рукам хирурга, и фактически сам приводит в движение инструменты. В настоящее время такими системами дистанционно управляет хирург, а механические руки робота воспроизводят движения его кистей и пальцев, увеличивая точность, уменьшая усталость и устраняя тремор. Активные системы используются для трансуретральной простатэктомии, эндоскопической телероботохирургии.
Следует подчеркнуть, что задачей робота является не замещение хирурга, а расширение спектра его возможностей.
1. История робототехники в хирургии
Первый хирургический робот Unimate Puma 560 был создан в конце 1980-х в Америке. Этот робот, по сути, являлся большой рукой с двумя когтистыми отростками, которые могли вращаться друг относительно друга. Амплитуда движений – 36 дюймов. Робот имел довольно ограниченный спектр движений, использовался в нейрохирургии для удерживания инструментов при проведении стереотаксической биопсии.
В 1986 году Калифорнийский университет в Дэвисе и исследовательский центр Томаса Дж. Уотсона корпорации IBM начали совместную работу по созданию робота-хирурга. В 1992 году компания CUREXO Technology Company на основе результатов этих исследований создала систему помощника хирурга, которая так и называлась - Robodoc Surgical Assistant System. Спустя несколько лет CUREXO Technology Company была награждена престижной премией Computerworld Smithsonian Award в номинации Инновации в Искусстве и Науке в Медицине под названием Integrated Surgical System (ISS). К настоящему времени с использованием системы ROBODOC® проведено 24 000 операций, что показало меньшую травматичность и большую точность в сравнении с операциями, проводимыми вручную. ROBODOC® - хирургический робот предназначен для всех основных операций по артропластике - первичная полная артропластика тазобедренного сустава, ревизия тазобедренного сустава, полная артропластика коленного сустава.
Основные этапы применения:
1. Точное КТ сканирование Предоперационное планирование начинается с КТ сканирования пациента, после чего появляется точная структура кости для представления в систему ORTHODOC. Запатентованное программное обеспечение форматирует КТ снимок на экран из 4 рабочих окон, показывается сустав в 3 плоскостях и его трехмерное изображение (уникальная технология) кости.
2. Трехмерное изображение Использование в работе трехмерного изображения сустава позволяет выбрать подходящий имплантат, соответствующий анатомической структуре. Имплантат выбирается из предустановленной базы, включающей самые современные имплантаты мировых производителей. Возможность увидеть сустав в разных плоскостях помогают хирургу в планировании операции, кроме того врач сразу видит виртуальный результат операции в трехмерном пространстве.
3. Разработка предоперационного плана.
Планирование операции с использованием системы ORTHODOC - точная длина ноги и полный объем движений и как результат точное расположения протеза. Кроме того процесс планирования операции помогает избежать проблем и отклонений во время хирургического вмешательства. После процесса планирования операции информация передается на вспомогательную машину ROBODOC Surgical Assistant.
4. Установка.
После предоперационного планирования операции информация загружается в ROBODOC Surgical Assistant, робот устанавливается в операционной, пациент позиционируется, используя специальные фиксаторы, затем хирург вскрывает сустав. После вскрытия сустава робот показывает хирургу, куда необходимо приложить специальный регистратор (DigiMatch™) для получения наиболее точной пространственной картины кости.
5. Хирургическая точность.
Под контролем хирурга, рука робота наводится на операционное поле. Затем робот начинает пилить кость с субмиллиметровой точностью. После подготовки кости к имплантации рука робота удаляется из операционного поля и хирург устанавливает протез так, как это было спланировано заранее.
В те же девяностые годы в Имперском Колледже в Лондоне был создан робот для трансуретральной резекции гиперплазированной предстательной железы - Probot, допущенный к клиническим испытаниям в 1996 году. Он состоит из трех осей движения и четвертой оси для перемещения резектоскопа, как показано рисунке.
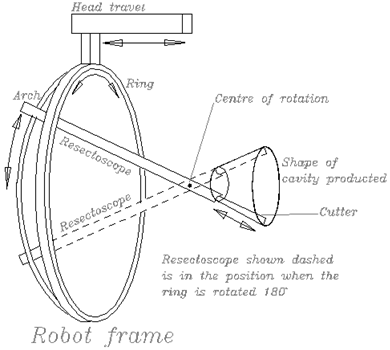
Система Probot, оснащенная ультразвуковым щупом, позволяла создать трехмерную модель простаты, быстро определить участок патологически измененной железы и произвести его резекцию. Резекция происходит за счёт движения лезвия резетоскопа по конической траектории.
В начале 90-х годов 20 века несколько ученых NASA-Ames team прошли в Stanford Research Institute (SRI), где они совместно разработали высокоточный телеманипулятор. US Army (Вооруженные силы США) заметили работу SRI и она заинтересовала их возможностью снижения смертности в период боевых действий.
При финансировании Вооруженных сил США был создан проект по созданию мобильного госпиталя оборудованного роботом. В 1994 году компания Computer Motion изготовила первого робота-хирурга, получившего сертификат US FDA - Automated Endoscopic System for Optimal Positioning (AESOP). Это была механическая рука, наделенная семью степенями свободы движений и предназначенная для автоматического изменения положения эндоскопа.
Смысл проекта заключался в том, что раненный солдат мог быть немедленно прооперирован хирургом в мобильном госпитале при помощи робота. При этом хирург находился в безопасном месте. Mobile Advanced Surgical Hospital.
Эта система была успешно протестирована на животных. Но так и не была внедрена для использования во время военных действий. Некоторые из хирургов и инженеров, работающих над хирургическими роботизированными системами для Армии США, в итоге организовали коммерческое предприятие, и представили эту технологию хирургическому сообществу. Двумя годами позже AESOP "приобрел" слух и смог выполнять голосовые команды хирурга. Теперь у "Эзопа" три металлические руки. Первая реагирует на голос хирурга. Она оснащена миниатюрной телекамерой, которая посредством крохотных линз, введенных через несколько отверстий длиной около сантиметра, дает возможность врачу наблюдать за операционным полем в трехмерном изображении при десятикратном увеличении. Две другие руки робота, которые врач контролирует с пульта управления, производят хирургические манипуляции специально разработанными крохотными хирургическими инструментами: разрезы тканей и наложение швов. Причем делают они это с большей точностью, чем опытный хирург, руки которого из-за напряжения и усталости могут в какой-то момент дрогнуть. Это значительно уменьшает размер операционной раны и обеспечивает пациенту более быстрое выздоровление, чем после лапароскопических операций, не говоря уже об обычных.
В 1998 году появился его "дальний родственник" - активный робот ZEUS, предназначенный для дистанционной эндоскопической хирургии. Параллельно с ZEUS создавалась другая аналогичная система, получившая название DA VINCI. Вначале 90-х известная корпорация SRI International стала одним из нескольких акцепторов гранта, выставленного на конкурс правительственным агентством DARPA, на разработку методов телехирургии. Был создан прототип робота-хирурга, вдохновивший Фредерика Молла в 1995 году учредить компанию Intuitive Surgical. Здесь идеи, заложенные SRI, эволюционировали и воплотились в то, что сегодня известно как DA VINCI.
В принципе, системы DA VINCI и ZEUS имеют много общего: это активные роботы, управляемые дистанционно со специальной рабочей станции. Эти системы позволяют оператору находиться на значительном расстоянии от больного, управляя тремя "руками" робота (две для удержания инструментов и осуществления манипуляций, а третья для продвижения эндоскопической камеры). Современная компьютерная и видеотехника создает перед глазами хирурга высококачественное изображение операционного поля. Первоначально подобная технология разрабатывалась для применения в военных условиях, при повышенной радиации или даже в космосе, позволяя квалифицированному медперсоналу находиться вне опасности. Однако роботы "прижились" в ведущих современных клиниках, и в настоящее время в мире уже выполнены тысячи операций с использованием DA VINCI и ZEUS. Именно между этими системами сегодня развернулась основная конкурентная борьба.
2. Основное описание системы da Vinci
Система робота "Да Винчи" - это система, предназначенная для робот-ассистированной лапароскопии. Система имеет несколько манипуляторов (2 или 3 манипулятора, к которым крепятся инструменты, плюс 1 манипулятор, на котором закреплена камера) и повторяет движения человеческих рук в теле пациента. Хирург сидит за панелью управления, видит операционное поле при помощи стереоскопического видеоканала и посредством джойстиков управляет инструментами в "руках" робота. С помощью этих инструментов, вводимых в тело пациента через проколы в коже, операция проводится с большой точностью.
Роботизированная система "Да Винчи" состоит из 3 основных частей, которые образуют функциональное единство. Это панель управления, операционная панель и оптическая система.

Панель управления.
Панель управления - это место работы врача-оператора, откуда он управляет движением инструментов внутри тела пациента. Управление инструментами осуществляются с помощью двух джойстиков, которые полностью копируют движения запястий хирурга и переносят их на манипуляторы, а затем на инструменты в операционной части устройства.
Второй элемент управления - это ножные педали, с помощью которых регулируются коагуляция инструментов, фокусировка камеры и переключение между рабочими манипуляторами.
Хирург следит за ходом операции с помощью оптического устройства, которое предоставляет ему реальное пространственное изображение операционного поля. Такое изображение позволяет осуществлять интуитивное управление системой, в особенности определение положения инструментов внутри тела пациента (можно различить глубину).
При работе с системой через панель управления можно регулировать некоторые настройки, в частности, градуируемость движений рук по отношению к движению инструментов. Здесь же проводятся регулировки перед началом операции, например, калибровка камер устройства, выбор используемой телескопической трубки (прямая или скошенная) и типа изображения.

Таким образом, панель управления обладает следующими характеристиками:
· Используя хирургическую систему da Vinci, хирург оперирует, комфортно сидя у консоли и видя трехмерное изображение операционного поля.
· Пальцы хирурга захватывают рукоятки под дисплеем, а кисти и запястья располагаются естественно по отношению к его глазам.
· Система равномерно транслирует движения пальцев, кистей и запястий хирурга в точные движения хирургических инструментов внутри пациента в реальном времени. Стойка у операционного стола.
· Имеет три-четыре роботизированные руки – две или три инструментальные, и одну с эндоскопом – которые выполняют команды хирурга.
· Лапароскопические руки работают через 1-2 сантиметровые доступы.
· Ассистенты вводят инструменты в полость, а также меняют инструменты.
Операционная (хирургическая) панель.
Операционная (хирургическая) панель - это часть системы, которая находится в прямом контакте с пациентом, и поэтому в течение всей операции она имеет специальное стерильное покрытие. В зависимости от конфигурации операционная панель содержит 2 или 3 рабочих манипулятора с закрепленными на них инструментами, а также один манипулятор с камерой.
Движения манипуляторов можно разделить на два вида. Первый вид - это моторные движения, которые задаются оператором непосредственно с панели управления, оказывают влияние на ход операции в теле пациента, управляют инструментами и с помощью которых, собственно, проводится операция. Второй вид - это движения торможения, которые задаются ассистирующим персоналом и служат только для настройки системы перед операцией.

Инструменты и камера легко прикрепляются к рукам и легко перемещаются с консоли или ассистентом. Первые две руки робота, соответствующие правой и левой руке хирурга, держат инструменты EndoWrist®. Третья рука держит эндоскоп, позволяя хирургу легко менять, перемещать, приближать и поворачивать поле зрения с консоли. Такая подвижность устраняет необходимость в ассистенте. Четвертая рука позволяет добавлять третий инструмент EndoWrist и выполнять дополнительные задачи, такие как приложение противотяги и поддержка непрерывного шва. Это устраняет необходимость еще в одном ассистенте. Хирург может одновременно управлять любыми двумя руками с помощью педалей под консолью.
Созданные по образцу человеческого запястья, инструменты EndoWrist имеют даже больший объем движений, чем человеческая рука. Они действительно позволяют системе da Vinci продвигать хирургическую точность и технику за пределы возможностей человеческой руки. Сходно с человеческими сухожилиями внутренние тросы инструментов EndoWrist обеспечивают максимальную реакцию, давая возможность быстро и точно накладывать швы, выполнять диссекцию и манипуляции на тканях.
Набор инструментов EndoWrist включает разнообразие зажимов, иглодержателей, ножниц; монополярных и биполярных электрохирургических инструментов; скальпелей и других специализированных инструментов (всего более 40 типов инструментов). Инструменты EndoWrist могут иметь диаметр 5 мм и 8 мм.
При смене инструментов интерфейс сразу распознает тип нового инструмента и число его использований.
Оптическое устройство. Эта часть системы предназначена для обработки изображения со стереоскопической камеры, находящейся на операционной панели. В комплексе Da Vinci используется система обзора In Site. Управляемый роботизированной рукой двухлинзовый стерео эндоскоп, сопряженный с двумя 3-чиповыми камерами, переносит хирурга "внутрь" пациента.

Видеосистема снабжена двумя независимыми каналами передачи изображений, сопряженными с двумя цветными мониторами высокого разрешения. Система также имеет оборудование для обработки изображений, состоящее из двух видеокамер, алгоритмов усиления контуров и шумоподавления. Результирующее трехмерное изображение высокого разрешения яркое, четкое и резкое, без утомляющего мерцания и затухания. Управление камерой, осуществляемое через рукоятки и педали, обеспечивает плавное перемещение в операционном пространстве. Перемещение головы хирурга на консоли не влияет на качество изображения.
Оптическое устройство включает также другие приспособления, необходимые для лапароскопии (источник света, коагулятор, инсуфляция ...). На оптическом устройстве размещен и дополнительный монитор, позволяющий остальному персоналу следить за операцией.
· Восстановление митрального клапана.
· Реваскуляризация миокарда.
· Абляция тканей сердца.
· Установка эпикардиального электронного стимулятора сердца для бивентрикулярной ресинхронизации.
· Желудочное шунтирование.
· Фундопликация по Nissen
· Гистерэктомия и миомэктомия.
· Тимэктомия.
· Лобэктомия легкого.
· Эзофагоэктомия.
· Резекция опухоли средостения.
· Радикальная простатэктомия.
· Пиелопластика.
· Удаление мочевого пузыря.
· Радикальная нефрэктомия и резекция почки.
· Реимплантация мочеточника.
На сегодняшний день на территории Российской Федерации используется 6 роботизированных систем "da Vinci" в 6 больницах (ФГУ "Федеральный центр сердца, крови и эндокринологии имени В.А. Алмазова Федерального агентства по высокотехнологичной медицинской помощи", г. Санкт-Петербург, Окружная Клиническая Больницам №1 Ханты-мансийского автономного округа, Ханты-мансийский автономный округ- ЮГРА, Национальный Медико-хирургический центр им. Н.И. Пирогова, г. Москва, Институт хирургии им. А. В. Вишневского РАМН, г. Москва, Московский Государственный Медико-Стоматологический Университет на базе Государственной Клинической больницы №50, г. Москва, Областная Клиническая Больница №1 города Екатеринбург, г. Екатеринбург).
3. Достоинства и недостатки системы da Vinci
Одним из основных преимуществ роботохирургии является нивелирование многих недостатков лапароскопической техники. Хирургические роботы оснащены трехмерной системой визуализации с эффектом реальной глубины получаемого изображения. Система обеспечивает постоянную четкую визуализацию операционного поля благодаря программе автоматического маневрирования изображения в зависимости от изменения положения головы хирурга и локализации хирургических манипуляций.
В ходе выполнения вмешательства может использоваться дополнительная информация в виде структуры окружающих тканей, полученная при КТ или МРТ.
Точность хирургических действий обеспечивается за счет устранения эффекта естественного дрожания человеческих рук, использования инструментов с увеличенной свободой движения рабочей части (семь плоскостей) и возможностью системы трансформировать большие по амплитуде движения на джойстиках управления центральной консоли в точные манипуляции в теле пациента. В результате рабочие части инструментов приобретают возможности человеческих рук, а хирург получает возможность оперировать не двумя, а тремя и большим числом рук. Система управления устроена таким образом, что инструменты просто повторяют движение кистей пальцев хирурга.
Система не требует изменения положения тела хирурга во время сложных и длительных манипуляций. Руки оператора находятся в эргономичном положении на подлокотниках, пальцы и кисти фиксируют соответствующие органы управления. В итоге, все преимущества можно разделить на 3 группы:
1. Улучшенная сноровка, точность и управляемость.
· da Vinci позволяет транслировать движения рук хирурга в соответствующие микро движения инструментов внутри пациента.
· Инструменты EndoWrist® управляются кончиками пальцев.
· 4 роботизированные руки с инструментами, имеющими 7 степеней свободы (больше чем кисть человеческой руки) и изгибающиеся на 90 градусов.
· Масштабирование движений и подавление тремора.
Патентованный инструментарий EndoWrist системы da Vinci, оснащенный системой уменьшения тремора, системой управления движениями улучшает равноценность владения обеими руками до пределов, недоступных человеку и укорачивает кривую обучения. Расширенный объем движений инструментов улучшает доступ и надежность при операциях в ограниченных пространствах, таких как малый таз, средостение, сердечная сумка.
2. Отличная эргономика.
· Оптимальное уравнивание оптической и двигательной оси.
· Комфортное положение сидя.
Da Vinci – единственная хирургическая система, предназначенная для работы, сидя, что не только более комфортно, но также может давать клинические преимущества вследствие меньшего утомления хирурга. Система da Vinci дает естественное уравнивание глаз и рук на хирургической консоли, что обеспечивает лучшую эргономику, чем традиционная лапароскопия. Так как роботизированные руки системы da Vinci держат камеру и инструменты на весу, это потенциально уменьшает скручивающий момент на брюшной стенке, травму пациента, необходимость в ассистенции и утомляемость. Наконец, так как роботизированные руки дают дополнительную механическую силу, хирург теперь может оперировать пациентов с выраженным ожирением.
3. Безопасность.
Система da Vinci уменьшает риск инфицирования хирургической бригады гепатитом, ВИЧ и т.п.
В целом, da Vinci может дать хирургу лучшую визуализацию, сноровку, точность и управляемость, чем в открытой хирургии, при выполнении операции через 1 - 2 - сантиметровые разрезы.
Основными недостатками системы da Vinci являются продолжительность настройки оборудования, его высокую стоимость (около 3 млн. евро), длительность и стоимость подготовки и обучения медицинского персонала.
4. Робототехника сегодня
Разработка и производство медицинских роботов в XXI веке достигли таких технических и экономических успехов, что информация о них с каждым годом все меньше кажется научной фантастикой. Сообщения об успешных операциях, проведенных с помощью "электронных хирургов", поступают из различных медицинских центров мира, в том числе российских. Современные роботы обеспечивают дистанционные осмотры и консультации, ухаживают за пациентами и позволяют врачам заглядывать в самые труднодоступные участки тела пациента и безошибочно совершать тончайшие вмешательства. Основные достижения робототехники:
1. Разработанный американской компанией InTouch Health робот удаленного присутствия RP-7 позволяет врачу консультировать пациентов на расстоянии. Он оборудован камерой и дисплеем, кроме того в нем есть система фокусировки звука, позволяющая слушать конкретный диалог в шумном помещении. При необходимости телемедицинский RP-7 можно подключить к фонендоскопу, отоскопу или УЗИ-аппарату.
2. Робот RI-MAN - представитель электронных "сиделок", созданных японскими учеными. Проблема старения населения, остро стоящая в Японии (стране с одним из высочайших в мире показателей средней продолжительности жизни), заставляет конструкторов роботизировать процесс ухода за людьми с ограниченными возможностями.
3. Созданная итальянскими учеными плавающая капсула с камерой предназначена для исследования пищеварительной системы. Ее применение не приносит пациенту дискомфорта, который неизбежен при эндоскопии. Кроме того, с помощью капсулы можно осмотреть желудочно-кишечный тракт на всем протяжении, что недоступно современным эндоскопическим методикам.
4. Самособирающийсяробот ARES (Assembling Reconfigurable Endoluminal Surgical System. Самособирающаяся эндолюминальная хирургическая система с изменяемой конфигурацией) для проведения операций без разреза кожных покровов. Проглоченные пациентом отдельные функциональные блоки внутри организма собираются в управляемый модуль, с помощью которого проводится хирургическое вмешательство.
5. Робот Bloodbot, разработанный в Имперском колледже Лондона, предназначен для автоматического забора образцов крови.
6. Робот i - Snake для проведения торакоскопических операций на бьющемся сердце. Положение камер и инструментов синхронизируется с движениями сердечной мышцы, при этом хирург видит на экране неподвижное изображение органа.
Роботохирургия продолжает стремительно развиваться. Стала реальностью так называемая трансконтинентальная телероботохирургия. В 2001 году хирурги успешно удалили желчный пузырь с помощью дистанционно управляемого робота ZEUS, установленного в одном из госпиталей Франции, находясь от пациентки на расстоянии 7000 км в Нью-Йорке. Современные средства связи обеспечили передачу сигналов в обоих направлениях (от видеокамеры лапараскопа к хирургу и обратно - от станции управления к роботу) по трансатлантическому волоконно-оптическому кабелю. Задержка сигнала составляла менее 200 мсек. (безопасно допустимое отставание сигнала составляет около 300 мсек.). Пока непосредственно возле больного должен находиться квалифицированный ассистент хирурга, который обеспечивает доступ робота в зону оперативного вмешательства. Интересно, что для безопасности пациента в случае сбоя связи или прекращения визуального контроля хирурга (достаточно отвести голову от консоля наблюдения) система входит в резервный режим ожидания, прекращая манипуляции. В феврале 2002 года кардиохирурги из Columbia Presbyterian Medical Center (США) сообщили об успешном проведении аортокоронарного шунтирования с использованием системы DA VINCI. Сложная, но малоинвазивная операция была проведена через три небольших разреза (8-15 мм) в области грудной клетки для введения двух манипуляторов и эндоскопа. В ноябре 2002 года на сессии American Heart Association были представлены результаты 15 операций по устранению врожденного дефекта межпредсердной перегородки, проведенных в той же клинике, что положило начало открытой роботохирургии сердца без "вскрытия" грудной клетки. В августе 2002 года в Virginia Urology Center выполнена первая успешная роботомикрохирургическая урологическая операция. С использованием все того же DA VINCI была прозведена так называемая Vasectomy Reversal - микрохирургическая операция по восстановлению целостности семявыносящих протоков.
Многие зарубежные доктора начали публиковать отчёты об операциях с использованием робототехники, в первую очередь, системы da Vinci. Операции были различные: холецистектомии, антирефлюксные вмешательства при грыжах пищеводного отверстия диафрагмы, гастропластика, симпатэктомия и др. При этом все авторы дали высокую оценку робототехнологии, отметили большую безопасность, уменьшение продолжительности хирургического вмешательства и длительности госпитализации.
Заключение
Подводя итоги анализа использования робототехники в хирургии, возможно выделить следующие области ее применения:
— грудная хирургия и кардиохирургия — выделение внутренней грудной артерии, восстановление митрального и трехстворчатого клапанов, установка электрода для бивентрикулярной ресинхронизации, трансхиатальная эзофагэктомия, биопсия и резекция легких, пульмонэктомия;
— сосудистая хирургия — восстановительные операции на грудной аорте и крупных сосудах, на брюшной аорте, аортобедренное шунтирование;
— гинекология — репродуктивная хирургия (реанастомоз маточных труб, миомэктомия, аблация эндометрия, транспозиция яичника, лигирование маточных труб), реконструктивная тазовая хирургия (операция Burch, крестцовая кольпопексия), общая гинекология (гистерэктомия, удаление дермоидной кисты, аднексэктомия, саль- пингэктомия);
— абдоминальная хирургия — бариатрия, герниопластики, фундопликация, резекции печени, поджелудочной железы; резекции желудка, тонкой, ободочной и прямой кишки, холецистэктомия, симпатэктомия, реконструктивные операции;
— урология — простатэктомия, нефрэктомия, цистэктомия, адреналэктомия, орхиэктомия, забор почки у живого донора для трансплантации.
При использовании робототехники возникает минимальное количество осложнений: менее 1% инфицирования раны или формирования грыжи, нарушений функции кишечника, ранений кишки, мочевого пузыря и уретры, которые требуют дополнительных операций, менее 1% кровотечений, образования гематом и необходимости переливания крови.
С учетом довольно высокой стоимости комплекса да Винчи (приблизительно 3 млн. евро.) его использование оправдано в крупных многопрофильных высокотехнологичных хирургических центрах, где лечат больных со сложными неординарными заболеваниями.
Безусловно, все пациенты не могут быть оперированы с использованием робототехники. В связи с этим необходимы разработка данной технологии и определение показаний к ее использованию. Нужно модифицировать старые и внедрить новые алгоритмы диагностики, лечения и послеоперационного ведения больных с учетом применения роботизированных комплексов.
Список литературы
робототехника хирургический манипулятор эндолюминальный
1. А.В.Фёдоров "Роботохирургия"
2. М.И. Прудков "Основы минимально инвазивной хирургии"
3. Журнал "Биомедицинская радиоэлектроника" № 9 2003 год. Статья "Перспективы применения робототехники в хирургии" Саврасов Г.В., Дроговоз В.А
4. Журнал " Вестник национального медико-хирургического центра им. Н.И. Пирогова" №2 2008 г. Статья "Робототехника в хирургии – истоки, реалии, перспективы" Шевченко Ю.Л., Карпов О.Э
5. Е.И. Юревич "Основы робототехники"
6. Шахинпур М. "Курс робототехники"
7.www.davincirobot.ru
8. www.intuitivesurgical.com