Математическое описание динамических процессов электромеханического преобразования энергии
Математическое описание динамических процессов электромеханического преобразования энергии
1. Общие сведения
В структуре электромеханической системы, представленной на рис.В.2, электромеханический преобразователь ЭМП является функциональным звеном, осуществляющим электромеханическое преобразование энергии. Его физические свойства определяют регулировочные возможности, рациональные способы управления и энергетические показатели электропривода. Поэтому в данном курсе изучению свойств электромеханических преобразователей различного типа уделяется значительное внимание. Основой для углубленного анализа их характеристик, режимов работы и особенностей взаимодействия с другими элементами электромеханической системы являются изученные в курсе электрических машин принципы действия, типы и конструкции двигателей. При этом на первый план выдвигаются вопросы динамики процессов электромеханического преобразования энергии.
Целью данной главы является закрепление полученных в предшествующих курсах навыков составления дифференциальных уравнений, описывающих динамические электромагнитные процессы, и обучение на этой основе обобщенным приемам составления математического описания процессов электромеханического преобразования энергии, используемым во всем последующем изложении. Эти методы и приемы, разработанные в теории обобщенной электрической машины здесь адаптированы по содержанию и форме к потребностям курса. Необходимо освоить их исходные позиции и научиться практическому использованию наиболее употребительных форм записи уравнений. Важно также правильно понять и усвоить смысл и практическое значение характеристик двигателей, используемых в теории электропривода при изучении их электромеханических свойств.
Таким образом, данная глава является вспомогательной. В ней подготавливается математическая база для анализа физических свойств двигателей в разомкнутых и замкнутых системах электропривода. Перед изучением материалов главы нужно проверить знание дифференциальных уравнений электрического равновесия, общего уравнения электромагнитного момента машины, понятия индуктивностей, взаимных индуктивностей, потокосцеплений обмоток машин и т.п. и при необходимости восстановить в памяти их запись.
2. Обобщенная электрическая машина
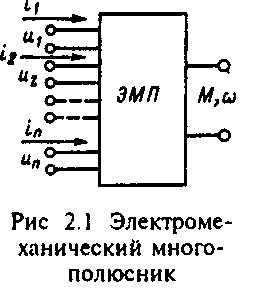
Электромеханический преобразователь в структуре электропривода (см. рис..2) представляет собой идеализированный двигатель, ротор которого не обладает механической инерцией, не подвержен воздействию момента механических потерь и жестко связан с реальным ротором, входящим в состав механической части электропривода. Этому условию соответствует представление двигателя в виде электромеханического многополюсника, показанного на рис..1. Здесь электромеханический преобразователь ЭМП имеет п пар электрических выводов, соответствующих я обмоткам двигателя, и одну пару механических выводов, на которых в результате электромеханического преобразования энергии при скорости развивается электромагнитный момент двигателя М.
Приложенные к обмоткам напряжения u1, u2, ... un связывают электромеханический преобразователь с системой управления электроприводом. Электромагнитный момент М является выходной величиной ЭМП и входной для механической части электропривода. Скорость ротора определяется условиями движения механической части, но при изучении процессов электромеханического преобразования энергии может рассматриваться как независимая переменная. Таким образом, механические переменные и М связывают электромеханический преобразователь с механической частью в единую взаимодействующую систему. Как правило, двигатели являются многофазными электрическими машинами. Это обстоятельство осложняет математическое описание динамических процессов, так как с увеличением числа фаз возрастает число уравнений электрического равновесия и усложняются электромагнитные связи. Поэтому во всех случаях, когда это возможно, стремятся сводить анализ процессов в многофазной машине к анализу тех же процессов в эквивалентной двухфазной модели этой машины.
В теории электрических машин доказано, что любая многофазная электрическая машина с n-фазной обмоткой статора и m-фазной обмоткой ротора при условии равенства полных сопротивлений фаз статора (ротора) в динамике может быть представлена двухфазной моделью. Возможность такой замены создает условия для получения обобщенного математического описания процессов электромеханического преобразования энергии во вращающейся электрической машине на основе рассмотрения идеализированного двухфазного электромеханического преобразователя. В специальной литературе такой преобразователь получил название обобщенной электрической машины.
Обобщенная электрическая машина является упрощенной моделью реальной машины. В реальной машине обмотки уложены в пазах статора и ротора, а это вызывает несинусоидальность МДС обмоток, с одной стороны, и неравномерность воздушного зазора - с другой. В обобщенной машине сосредоточенные в пазах проводники с током заменяются синусоидальными токовыми слоями, эквивалентными по МДС первым гармоникам МДС соответствующих реальных обмоток, а неравномерность зазора, обусловленная пазами, не учитывается. При анализе динамических процессов в обобщенной электрической машине, кроме того, принимается, что магнитная цепь машины не насыщается и имеет очень высокую магнитную проницаемость. Зазор явнопо-люсной машины принимается равномерным, а влияние явнопо-люсности учитывается введением переменной радиальной магнитной проницаемости:
![]()
где эл=pп и - соответственно электрический и геометрический угол поворота ротора относительно статора, рад; рп - число пар полюсов машины.
Как было отмечено, условием возможности приведения многофазной машины к эквивалентной двухфазной является ее симметрия, поэтому полные сопротивления обмоток фаз статора и ротора обобщенной машины равны. Напряжения питания могут быть несимметричными, при этом для анализа динамики следует пользоваться известным методом симметричных составляющих.
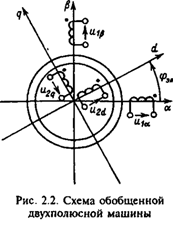
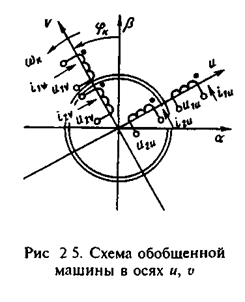
Здесь принимается система обозначений, которая используется во всем последующем изложении курса. Принадлежность переменной той или иной обмотке определяется индексами, которыми обозначены оси, связанные с обмотками обобщенной машины, с указанием отношения к статору (1) или ротору (2), как показано на рис.2.2. На этом рисунке система координат, жестко связанная с неподвижным статором, обозначена ,, с ротором - d, q.
Динамика обобщенной машины описывается четырьмя уравнениями электрического равновесия в цепях ее обмоток и уравнением электромеханического преобразования энергии, которое выражает электромагнитный момент машины М как функцию электрических и механических координат системы.
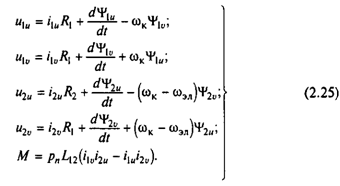
Уравнения Кирхгофа, выраженные через потокосцепления , имеют вид
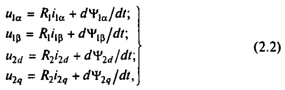
где R1 и R2 - активное сопротивление фазы статора и приведенное активное сопротивление фазы ротора машины.
Уравнения (2.2) однотипны, и их можно записать в обобщенной форме:
![]()
где индекс i принимает значения 1а, 1, 2d, 2q, соответствующие осям, с которыми связаны обмотки.
Потокосцепление каждой обмотки в общем виде определяется результирующим действием токов всех обмоток машины:
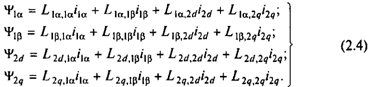
В системе уравнений (2.4) для собственных и взаимных индуктивностей обмоток принято одинаковое обозначение L с подстрочным индексом, первая часть которого i=1,1,2d, 2q указывает, в какой обмотке наводится ЭДС, а вторая j=1, 1, 2d, 2q - током какой обмотки она создается. Например, L11 - собственная индуктивность фазы статора;
Принятые в системе (2.4) обозначения и индексы обеспечивают однотипность всех уравнений, что позволяет прибегнуть к удобной для дальнейшего изложения обобщенной форме записи этой системы:

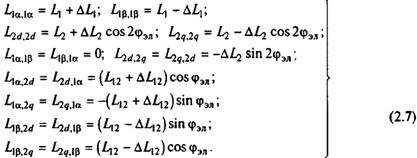
При работе машины взаимное положение обмоток статора и ротора изменяется, поэтому собственные и взаимные индуктивности обмоток в общем случае являются функцией электрического угла поворота ротора L=f(эл). Для симметричной неявно-полюсной машины собственные индуктивности обмоток статора и ротора не зависят от положения ротора:

L11=L11=L1=const; L2d2d=L2d =L2=const, а взаимные индуктивности между обмотками статора или ротора равны нулю: L1a1=L11=L22d=L22q=0, так как магнитные оси этих обмоток сдвинуты в пространстве относительно друг друга на угол эл=90°. Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменений при повороте ротора на угол фэл=2a, поэтому с учетом принятых на рис.2.2 направлений токов и знака угла поворота ротора можно записать
Для явнополюсной машины в соответствии с принятым выше условием (2.1) собственные и взаимные индуктивности обмоток необходимо представить в виде суммы двух составляющих, одна из которых пропорциональна , а вторая .. Составляющие, пропорциональные , не имеют отличий от рассмотренных для неявнополюсной машины. Составляющие, пропорциональные , имеют полный цикл изменения при повороте ротора на одно полюсное деление. Так как ротор предполагается гладким, то собственные индуктивности явнополюсного статора не зависят от положения ротора, а собственные индуктивности ротора изменяются в соответствии с изменениями . При явнополюсном статоре взаимная индуктивность между обмотками ротора не равна нулю и также определяется изменениями .
Изложенным положениям соответствуют следующие выражения для индуктивностей обобщенной явнополюсной машины:
С учетом (2.5) уравнения электрического равновесия (2.3) можно представить в виде

где L определяются (2.6) или (2.7).
Дифференциальное уравнение электромеханического преобразования энергии получим, воспользовавшись известной формулой (8):

С помощью (2.5) электромагнитный момент машины (2.9) может быть выражен через токи обмоток:

Уравнение электромагнитного момента для неявнополюсной машины можно получить, подставив в (2.10) выражения дня собственных и взаимных индуктивностей обмоток (2.6):
![]()
Аналогично может быть получено с помощью (2.7) и уравнение электромагнитного момента явнополюсной машины.
3. Электромеханическая связь электропривода и ее характеристики
Уравнения электрического равновесия (2.8) и уравнение электромагнитного момента (2.10) представляют собой математическое описание динамических процессов преобразования энергии во вращающихся электрических машинах, записанное в общем виде и выраженное через действительные переменные двухфазной модели. Вместе (2.8) и (2.10) образуют систему из пяти уравнений, устанавливающую взаимосвязь между процессами в механической и электрической частях электромеханической системы. Проявления этой взаимосвязи в теории электропривода называются электромеханической связью.
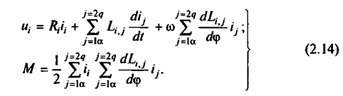
Для разъяснения сути этого понятия воспользуемся уравнениями электрического равновесия (2.8). В соответствии с (2.6) и (2.7) индуктивности Li,j зависят от электрического угла поворота ротора фэл, а следовательно, и от времени t. Поэтому, выполнив дифференцирование в (2.8), можно эти уравнения представить в виде

где =d/dt - угловая скорость ротора машины.
Первый член каждого уравнения (2.12) представляет собой падение напряжения на активном сопротивлении цепи данной обмотки, второй - результирующую ЭДС самоиндукции и взаимной индукции еLi вызванную изменениями токов в обмотках, а третий член отражает взаимодействие механической и электрической частей электропривода, так как представляет собой результирующую ЭДС ei наведенную в обмотке в результате механического движения ротора машины:

Наличие в (2.12) ЭДС ei, зависящих от скорости ротора двигателя, приводит к тому, что изменения скорости, вызванные процессами в механической части, вызывают изменения токов ii потребляемых обмотками машины. Рассмотренное явление представляет собой электромеханическую связь в системе электропривода, благодаря которой при питании двигателя от источника напряжения существует зависимость токов силовой цепи электропривода от его скорости. Так как токи ii благодаря электромеханической связи зависят от скорости ротора машины, то и ее электромагнитный момент, определяемый (2.10), также является функцией скорости.
Качественными и количественными характеристиками электромеханической связи, широко используемыми в теории электропривода, являются электромеханические и механические характеристики. Электромеханическими характеристиками называются характеристики ii=f() или =f(ii), соответствующие статическим или конкретным динамическим режимам работы электропривода. Аналогичные характеристики М=f() и =f(М), связывающие в этих режимах электромагнитный момент и скорость электропривода, называются механическими характеристиками.
Уравнения электрического равновесия (2.12) выражают математическую связь между функциями ii(t) и (t) в динамических процессах электромеханического преобразования энергии. Следовательно, эти уравнения представляют собой обобщенное математическое описание электромеханических характеристик двигателя во всех режимах работы. Поэтому в дальнейшем они называются уравнениями электромеханической характеристики двигателя.
Система уравнений, составленная из уравнений электромеханической характеристики (2.12) и электромагнитного момента (2.10), устанавливает математическую связь между функциями M(t) и (t) во всех режимах работы, т. е. является обобщенным математическим описанием механических характеристик двигателя. В дальнейшем эти уравнения называются уравнениями механической характеристики.
Таким образом, уравнения (2.12) вместе с (2.10) образуют систему уравнений механической характеристики двигателя:
Все множество электромеханических и механических характеристик, определяемых (2.12) и (2.14), в зависимости от режимов работы электропривода разделяется на динамические и статические характеристики. Всем динамическим процессам соответствуют динамические электромеханические ii=f() и механические М=f() характеристики, а статическим - статические. Уравнения статических характеристик получаются из общих уравнений динамики (2.12) и (2.14) путем подстановки в них условий, соответствующих статическим режимам работы.
Электромеханическая связь объединяет механическую часть электропривода и электромеханический преобразователь в единую электромеханическую систему. Действительно, благодаря наличию этой связи электромагнитный момент двигателя реагирует на процессы, протекающие в механической части, и в свою очередь оказывает влияние на эти процессы. Как следствие, электромеханическая связь определяет важные физические свойства разомкнутых и замкнутых электромеханических систем, и ее характеристики в теории электропривода являются эффективным инструментом для изучения этих свойств. Создание электроприводов, обладающих требуемыми качествами, как ниже будет показано, практически реализуется путем формирования требуемых статических и динамических механических характеристик электропривода.
4. Линейные преобразования уравнений механической характеристики обобщенной машины
При решении многих задач значительное упрощение математического описания процессов электромеханического преобразования энергии достигается путем линейных преобразований исходной системы уравнений, при этом осуществляется замена действительных переменных новыми переменными при условии сохранения адекватности математического описания физическому объекту. Условие адекватности обычно формулируется в виде требования инвариантности мощности при преобразовании уравнений. Вновь вводимые переменные могут быть либо действительными, либо комплексными величинами, связанными с реальными переменными формулами преобразования, вид которых должен обеспечивать выполнение условия инвариантности мощности.
Целью преобразования всегда является то или иное упрощение исходного математического описания динамических процессов: устранение зависимости индуктивностей и взаимных индуктивностей обмоток от угла поворота ротора, возможность оперировать не синусоидально меняющимися переменными, а их амплитудами и т. п.
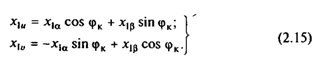
Вначале рассмотрим действительные преобразования, позволяющие перейти от физических переменных, определяемых системами координат, жестко связанными со статором (, ) и с ротором (d, q), к расчетным переменным, соответствующим системе координат и, v, вращающихся в пространстве с произвольной скоростью к. Для формального решения задачи представим каждую реальную обмоточную переменную - напряжение, ток, потокосцепление - в виде вектора, направление которого жестко связано с соответствующей данной обмотке осью координат, а модуль изменяется во времени в соответствии с изменениями изображаемой переменной.
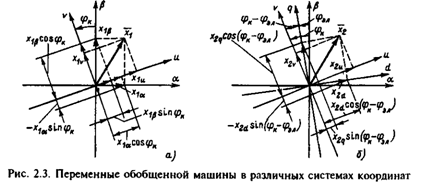
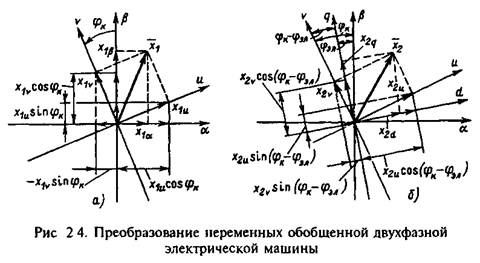
На рис.2.3 обмоточные переменные обозначены в общем виде буквой х с соответствующим индексом, отражающим принадлежность данной переменной к определенной оси координат, и показано взаимное положение в текущий момент времени осей , , жестко связанных со статором, осей d, q, жестко связанных с ротором, и произвольной системы ортогональных координат u, v вращающихся относительно неподвижного статора со скоростью к. Полагаются заданными реальные переменные в осях , (статор) и d, q (ротор), соответствующие им новые переменные в системе координат и, v можно определить как суммы проекций реальных переменных на новые оси.
Для большей наглядности графические построения, необходимые для получения формул преобразования, представлены на рис.2.3,а и б для статора и ротора отдельно. На рис.2.3,а показаны оси , , связанные с обмотками неподвижного статора, и оси и, v повернутые относительно статора на угол к=кt. Составляющие вектора х1u определены как проекции векторов х1 и x1 на ось u, составляющие вектора х1v- как проекции тех же векторов на ось v. Просуммировав проекции по осям, получим формулы прямого преобразования для статорных переменных в следующем виде:
Аналогичные построения для роторных переменных представлены на рис.2.3,б. Здесь показаны неподвижные оси , , повернутые относительно них на угол эл оси d, q, связанные с ротором машины, повернутые относительно роторных осей d и q на угол фк-фэл оси u, v, вращающиеся со скоростью к и совпадающие в каждый момент времени с осями и, v на рис.2.3,а. Сравнивая рис.2.3,б с рис.2.3,a, можно установить, что проекции векторов x2d и x2q на и, v аналогичны проекциям статорных переменных, но в функции угла (к-эл). Следовательно, для роторных переменных формулы преобразования имеют вид

Для пояснения геометрического смысла линейных преобразований, осуществляемых по (2.15) и (2.16), на рис.2.3 выполнены дополнительные построения. Они показывают, что в основе преобразования лежит представление переменных обобщенной машины в виде векторов ![]() и
и ![]() . Как реальные переменные х1 и х1, так и преобразованные x1u и х1v являются проекциями на соответствующие оси одного и того же результирующего вектора
. Как реальные переменные х1 и х1, так и преобразованные x1u и х1v являются проекциями на соответствующие оси одного и того же результирующего вектора ![]() . Аналогичные соотношения справедливы и для роторных переменных.
. Аналогичные соотношения справедливы и для роторных переменных.
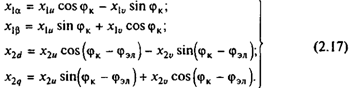
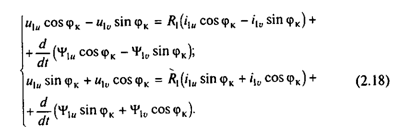
При необходимости перехода от преобразованных переменных x1u, x1v, x2u, x2v к реальным переменным обобщенной машины x1, x1, x2d, x2q используются формулы обратного преобразова-ния. Их можно получить с помощью построений, выполненных на рис.2.4,а и б аналогично построениям на рис.2.3,а и б:
Формулы прямого (2.15), (2.16) и обратного (2.17) преобразований координат обобщенной машины используются при построении управляющих вычислительных устройств для регулируемых электроприводов переменного тока, а также при проведении исследований, требующих более полного описания процессов в машине, чем достигаемое использованием уравнений механической характеристики обобщенной машины (2.14). Во всех случаях, когда применимы уравнения (2.14), можно непосредственно пользоваться преобразованными уравнениями механической характеристики и выражениями потокосцеплений. Для получения преобразованных уравнений (2.4) и (2.12) необходимо произвести в них замену реальных переменных с помощью формул (2.17) и выполнить преобразования полученных выражений для разделения уравнений по осям и, v.
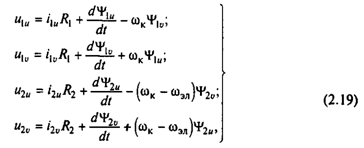
Эти преобразования несложны, но громоздки, поэтому для пояснения их сути ограничимся преобразованием уравнений электрического равновесия для цепи статора. Подставив выражения переменных (2.17) в первые два уравнения системы (2.2), получим
Уравнения (2.18) содержат переменные разных осей, поэтому для выделения уравнений электрического равновесия, соответствующих обмотке каждой оси, необходимы их преобразования. С этой целью выполним предусмотренные (2.18) операции дифференцирования произведений потокосцеплений на тригонометрические функции угла фк, домножим первое уравнение на cos фк, а второе на sin фк и произведем сложение полученных уравнений. Так как cos2 фк + sin2 фк=1, после приведения подобных членов получим уравнение электрического равновесия для оси и. Затем домножим первое уравнение (2.18) на - sin фк, а второе на cos фк после выполнения перечисленных операций получим аналогичное уравнение для оси v. В результате таких же преобразований уравнений электрического равновесия для роторных цепей получим преобразованные к осям и, v уравнения электромеханической характеристики обобщенной машины:
где к=dк/dt, эл=dэл/dt.
Аналогично с помощью (2.17) можно получить преобразованные уравнения потокосцеплений (2.4). Однако их можно достаточно просто записать на основе физических соображений. Переход к осям и, v соответствует переходу к взаимно неподвижным обмоткам, вращающимся со скоростью к (рис.2.5). Рассматривая этот рисунок, можно определить искомые соотношения:
![]()
Таким образом, потокосцепление каждой обмотки в системе координат и, v определяется собственной индуктивностью L1 или L2 и взаимной индуктивностью L12 с другой обмоткой, расположенной на той же оси. Взаимодействие с токами других обмоток отсутствует, так как их оси сдвинуты на электрический угол, равный 90°.
С помощью уравнений (2.20) можно при необходимости в уравнениях электромеханической характеристики (2.19) исключить потокосцепления, выразив их через токи обмоток.
Проверим, выполняется ли при данном координатном преобразовании уравнений обобщенной машины требование инвариантности мощности. Для упрощения записи примем u2d=u2q=0. Тогда вся мощность поступает в машину со стороны статора:
![]()
Произведем в (2.21) замену переменных с помощью формул (2.17) и получим
Таким образом, условие инвариантности мощности при рассмотренном преобразовании переменных выполняется. Воспользуемся формулами преобразования для получения удобных для использования выражений электромагнитного момента двигателя. Для неявнополюсной машины уравнение момента получим, заменив в (2.11) реальные переменные на преобразованные по формулам (2.17):
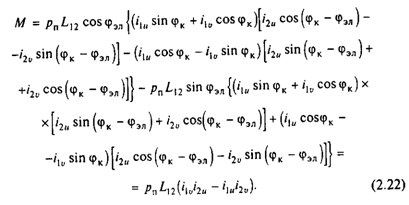
В результате преобразований (2.22) с учетом (2.20) можно получить следующие формулы для определения электромагнитного момента обобщенной машины:
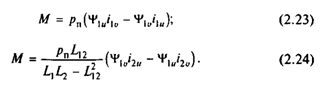
В справедливости формул (2.23) и (2.24) можно убедиться, выразив с помощью (2.20) потокосцепления через токи. Таким путем после преобразований все эти формулы приводятся к полученной выше формуле (2.22).
Объединив уравнения электромеханической характеристики (2.19) с уравнением электромагнитного момента (2.22), получим математическое описание механических характеристик двигателя в осях и, v:
Рассматривая эти уравнения, можно убедиться, что переход к модели со взаимно неподвижными обмотками существенно упрощает математическое описание динамических процессов электромеханического преобразования энергии. Коэффициенты взаимной индукции и потокосцепления взаимно неподвижных обмоток (2.20) становятся независимыми от механической координаты, а движение реальных обмоток и вращение координатных осей учитываются в уравнениях электрического равновесия введением дополнительных ЭДС вращения. Значительно упрощается уравнение электромагнитного момента двигателя, в котором устраняется непосредственная зависимость от угла фэл и электромеханическая связь проявляется посредством зависимости токов и потокосцеплений обмоток от скорости двигателя.
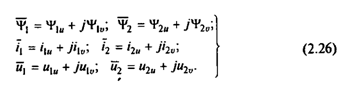
Построения на рис.2.3 свидетельствуют о возможности представления переменных обобщенной машины в комплексной форме и перехода к записи уравнений относительно результирующих векторов. Напряжения, токи, потокосцепления в (2.19) и (2.22) являются проекциями результирующих векторов, изображающих соответствующие величины, на ортогональные оси координат и, v. Если ось и принять за действительную, а ось v - за мнимую ось плоскости комплексного переменного, то изображающие векторы можно представить в виде
Уравнения (2.19) при комплексной записи изображающих векторов для оси и представляют собой действительную часть соответствующих комплексных уравнений статора и ротора, а для оси v - мнимую. Этому условию отвечают следующие уравнения динамической механической характеристики в комплексной форме:

где i*2 - величина, комплексно-сопряженная величине i2.
Векторы потокосцеплений могут быть выражены через результирующие векторы токов статора i1 и ротора i2:

Подставив (2.28) в (2.27), получим уравнения механической характеристики, выраженные через векторы результирующих токов статора и ротора:
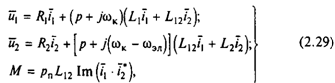
где
р=d/dt.
Комплексное преобразование при эл=const дает возможность аналитическим путем исследовать зависимость момента машины от времени при электромагнитном переходном процессе и в дальнейшем изложении будет для этой цели использовано.
Рассмотренные вещественное и комплексное преобразования уравнений механической характеристики обобщенной машины в значительной степени облегчают анализ динамических режимов электропривода и во многих случаях позволяют при моделировании на ЭВМ вместо реальных переменных токов и напряжений обмоток оперировать соответствующими им после преобразования постоянными величинами. Этого в ряде случаев удается достигнуть удачным выбором угловой скорости координатных осей u, v. На практике широко используются следующие варианты выбора этой скорости.
Выбор к=0 обеспечивает преобразование реальных переменных ротора, выраженных в осях d, q к неподвижным осям , , связанным со статором машины. Уравнения электромеханической характеристики в осях а, Р имеют вид
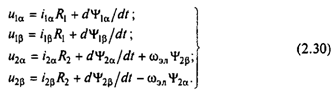
При преобразовании а, р напряжения и токи обмоток машины остаются переменными, но имеют одинаковую частоту, равную частоте тока статора.
Выбор к=эл соответствует преобразованию реальных переменных машины к осям d, q, жестко связанным с ротором машины. Уравнения электромеханической характеристики в осях d, q принимают вид
Здесь также напряжения и токи являются переменными, но имеют как в роторной, так и в статорной обмотках частоту 2эл=0-эл т.е. частоту тока ротора. В синхронных машинах в статических режимах работы 0эл=эл, поэтому использование уравнений (2.31) позволяет оперировать соотношениями, аналогичными постоянному току, как показано для следующего варианта.
Если положить к=0эл, можно осуществить преобразование х, у - выражение всех переменных системы в осях х, у, вращающихся с синхронной скоростью поля машины, при этом уравнения электромеханической характеристики записываются так:
Пусть при этом к реальным обмоткам статора приложена симметричная двухфазная система напряжений:
![]()
С помощью формул прямого преобразования (2.15), положив к=0эл и фк=0эл·t, преобразуем напряжения u1, u1 в соответствующие им напряжения u1y, u1x:

Таким образом, в синхронно вращающихся осях х, у реальные переменные напряжения, приложенные к обмоткам статора, при принятой начальной фазе преобразуются в постоянное напряжение U1max=const, приложенное к обмотке, расположенной по оси х. Этот результат имеет физический смысл: вращающееся магнитное поле, создаваемое при неподвижных обмотках статора токами, вызванными напряжениями u1а, u1р, при переходе к обмоткам, вращающимся со скоростью поля, может быть создано постоянным напряжением U1max Во многих случаях при исследованиях динамики машин переменного тока возможность замены синусоидальных переменных постоянными, достигаемая преобразованием к соответствующим осям координат, существенно упрощает моделирование и анализ его результатов.
5. Фазные преобразования переменных
Из изложенного следует, что рассмотренное линейное преобразование переменных обобщенной машины имеет вполне определенный физический смысл. Переменные токи обмоток фаз обобщенной машины сдвинуты на электрический угол, равный 90°. На такой же пространственный угол смещены геометрические оси обмоток фаз, поэтому результирующая МДС вращается относительно создающих ее обмоток со скоростью, пропорциональной частоте тока.
Мгновенное положение вектора результирующей МДС определяется геометрической суммой векторов МДС соответствующих обмоток, поэтому токи этих обмоток можно рассматривать как проекции вектора результирующей МДС на их оси. Как следует из рассмотрения рис.2.3, один и тот же вектор результирующей МДС может быть создан парами как неподвижных, так и вращающихся обмоток. Формулы преобразования токов и устанавливают взаимосвязь между проекциями результирующего вектора тока на соответствующие оси а, , d, q или u, v.
Математическое описание механических характеристик получено для двухфазной модели машины. Реальные двигатели переменного тока чаще всего имеют трехфазную обмотку статора, поэтому возникает необходимость преобразования переменных трехфазной машины к переменным двухфазной модели и наоборот. Основой для такого преобразования может служить рассмотренный физический смысл координатных преобразований. Действительно, один и тот же результирующий вектор МДС может быть создан как двухфазной, так и трехфазной обмоткой, поэтому для получения формул двухфазно-трехфазных преобразований можно использовать тот же принцип, что и для получения формул координатных преобразований.
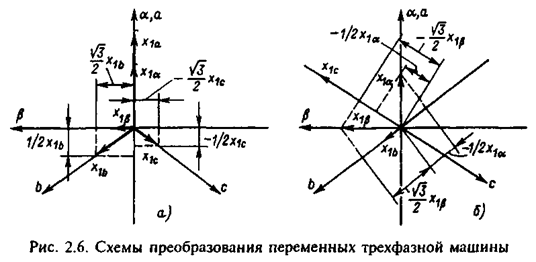
Итак, возникает задача преобразования реальных переменных x1a, x1b, х1с статора трехфазной машины к ортогональной системе координат , , т. е. к реальным переменным статора эквивалентной двухфазной машины. Решение этой задачи существенно осложняется в связи с необходимостью перехода от объекта с тремя фазами к обобщенной модели с двумя фазами, так как разница в числе фаз затрудняет выполнение условия инвариантности мощности. Учитывая это, представим реальные переменные трехфазной машины в виде векторов и будем полагать, что преобразованные переменные в осях , не равны, а пропорциональны сумме проекций реальных переменных x1a, х1b, х1с на оси , . На основании построения, показанного на рис.2.6,а, можно записать
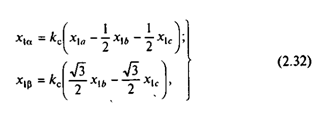
где kc - согласующий коэффициент пропорциональности, выбор которого должен осуществляться из условия инвариантности мощности.
Рассмотрим наиболее распространенный в практике случай, когда переменные трехфазной машины подчиняются условию