Проектирование плазменно-ионного двигателя
Инв. № _______
МІНІСТЕРСТВО ОСВІТИ ТА НАУКИ УКРАЇНИ
Національний аерокосмічний університет
ім. М.Є. Жуковського
«Харківський авіаційний інститут»
Кафедра двигунів та енергоустановок ЛА
Проектування плазмово-іонного двигуна
РОЗРАХУНКОВО - ПОЯСНЮВАЛЬНА ЗАПИСКА
до проекту за курсом «Основи теорії та функціонування плазмових прискорювачів і енергетичних установок»
ХАИ.441.06.КР.11.ПЗ.00.00
Виконала
студентка гр.xxxxxx
xxxxxxxx.
Консультант
xxxxxxxxxx.
Нормоконтроль
xxxxxx.
Харків 2006
СОДЕРЖАНИЕ. 2
РЕФЕРАТ. 4
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ, СИМВОЛОВ, СОКРАЩЕНИЙ И ТЕРМИНОВ.. 5
ВВЕДЕНИЕ. 11
Задание. 13
1 Расчет тяги ЭРД и определение его электрической мощности. 14
2 Разработка и описание теоретического чертежа размещения ЭРД на спутнике 17
3 Разработка функциональной схемы двигательного блока. Описание схемы.. 18
4 Инженерный расчёт ПИД.. 20
4.1 Принцип работы ПИД и схема его расчета. 20
4.2 Выбор рабочего тела для ПИД.. 21
4.3 Расчет параметров ионно-оптической системы.. 22
4.4 Расчет параметров газоразрядной камеры ПИД.. 27
4.5 Расчёт магнитного поля в ПИД.. 30
5 Разработка и описание теоретического чертежа двигателя. 37
6 Расчёт системы хранения и подачи рабочего тела. 39
6.1 Разработка и описание функциональной схемы системы хранения и подачи рабочего вещества. 39
6.2 Определение основных параметров бака для хранения рабочего вещества 40
6.3 Расчет проектных параметров ресивера. 43
6.4 Расчет проектных параметров термодросселя. 46
6.5 Расчет проектных параметров жиклера. 47
7 Описание функциональной схемы системы электропитания ПИД.. 49
8 Разработка и описание теоретического чертежа двигательного блока. 50
9 Разработка циклограммы энергопотребления. 51
Выводы.. 53
Перечень ссылок. 54
Приложение. 55
РЕФЕРАТ
Страниц — 52, таблиц — 2, рисунков — 3.
Объектом разработки данного проекта является двигательная установка для стабилизации параметров орбиты космического аппарата, целевым направлением которого является наблюдение за поверхностью Земли.
Цель работы – спроектировать электрореактивную двигательную установку на базе плазменно-ионного движителя. В процессе разработки использовались рекомендованные методики.
Произведен расчет параметров и геометрических размеров плазменно-ионного движителя. Разработаны система хранения и подачи рабочего вещества (ксенона), описано функционирование двигательного блока. В соответствии с расчетами разработаны чертежи двигательного блока.
Космический аппарат, плазменно-ионный движитель, ионно-оптическая система, газоразрядная камера, магнитное поле, электрод, катод, ресивер, бак, потенциал ионизации, ускоряющее напряжение, эффективная площадь движителя, плотность тока, цена иона, тяга движителя, массовый расход рабочего тела, удельный импульс движителя, время работы движителя.
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ, СИМВОЛОВ, СОКРАЩЕНИЙ И ТЕРМИНОВ
а – радиус орбиты космического аппарата относительно центра земли, км;
B – индукция магнитного поля, ![]()
![]() - ширина полюсных наконечников,
- ширина полюсных наконечников, ![]()
![]() - цена иона, эВ/ион;
- цена иона, эВ/ион;
![]() – коэффициент аэродинамического сопротивления;
– коэффициент аэродинамического сопротивления;
![]() - расстояние между электродами ионно-оптической системы, мм;
- расстояние между электродами ионно-оптической системы, мм;
![]() - диаметр бака,
- диаметр бака, ![]()
![]() - диаметр движителя, м;
- диаметр движителя, м;
![]() - диаметр проволоки соленоида,
- диаметр проволоки соленоида, ![]()
![]() - диаметр ресивера,
- диаметр ресивера, ![]()
![]() - характерный диаметр космического аппарата, м;
- характерный диаметр космического аппарата, м;
![]() - допускаемая напряжённость электрического поля между электродами, В/см;
- допускаемая напряжённость электрического поля между электродами, В/см;
G – геометрический параметр ионно-оптической системы;
h – высота орбиты относительно поверхности Земли, км;
![]() - ток соленоида,
- ток соленоида, ![]()
![]() - электронный ток с катода, А;
- электронный ток с катода, А;
![]() - ток ионного пучка, А;
- ток ионного пучка, А;
![]() - разрядный ток в газоразрядной камере, А;
- разрядный ток в газоразрядной камере, А;
![]() - удельный импульс движителя, м/с;
- удельный импульс движителя, м/с;
![]() - плотность тока, А/
- плотность тока, А/![]() ;
;
![]() - плотность тока соленоида,
- плотность тока соленоида, ![]()
![]() - коэффициент использования массы;
- коэффициент использования массы;
kз – гравитационный параметр Земли, км3/с2;
kрт - коэффициент, учитывающий потерю рабочего тела при хранении;
![]() - характерный размер камеры, длина разрядной камеры движителя,
- характерный размер камеры, длина разрядной камеры движителя, ![]()
![]() - масса конструкции бака,
- масса конструкции бака, ![]()
![]() - масса заправленного бака,
- масса заправленного бака, ![]()
![]() - масса конструкции ресивера,
- масса конструкции ресивера, ![]()
![]() - необходимый запас рабочего тела, кг;
- необходимый запас рабочего тела, кг;
![]() - полная масса рабочего вещества в ресивере,
- полная масса рабочего вещества в ресивере, ![]()
![]() - текущая масса рабочего вещества в ресивере,
- текущая масса рабочего вещества в ресивере,
![]() - масса рабочего вещества покинувшего объём ресивера,
- масса рабочего вещества покинувшего объём ресивера, ![]()
![]() - масса рабочего вещества, находящегося в ресивере в момент его заполнения,
- масса рабочего вещества, находящегося в ресивере в момент его заполнения, ![]()
![]() - секундный массовый расход рабочего тела, кг/с;
- секундный массовый расход рабочего тела, кг/с;
![]() - поступление массы рабочего вещества в ресивер в единицу времени, кг/с;
- поступление массы рабочего вещества в ресивер в единицу времени, кг/с;
![]() - число катушек соленоида;
- число катушек соленоида;
![]() - мощность, потребляемая двигательной установкой, Вт;
- мощность, потребляемая двигательной установкой, Вт;
![]() - средняя потребляемая мощность нагрузки, Вт;
- средняя потребляемая мощность нагрузки, Вт;
![]() - установившаяся мощность солнечной батареи, Вт;
- установившаяся мощность солнечной батареи, Вт;
![]() - число включений и включений электроклапана;
- число включений и включений электроклапана;
![]() - плотность ионов, количество ионов в единице объёма, 1/
- плотность ионов, количество ионов в единице объёма, 1/![]() ;
;
![]() - плотность электронов, количество электронов в единице объёма, 1/
- плотность электронов, количество электронов в единице объёма, 1/![]() ;
;
![]() - число отверстий в ионно-оптической системе;
- число отверстий в ионно-оптической системе;
![]() - критическое давление, при котором происходит фазовый переход р.т.,
- критическое давление, при котором происходит фазовый переход р.т., ![]()
![]() - максимальное давление, которое может быть достигнуто в ресивере,
- максимальное давление, которое может быть достигнуто в ресивере, ![]()
![]() - тяга электроракетного движителя, Н;
- тяга электроракетного движителя, Н;
![]() - первеанс,
- первеанс, ![]()
![]() - давление внутри ресивера,
- давление внутри ресивера, ![]()
![]() - давление внутри движителя,
- давление внутри движителя, ![]()
![]() - принимаемое давление хранения р.т.,
- принимаемое давление хранения р.т., ![]()
![]() - универсальная газовая постоянная, Дж·М/К;
- универсальная газовая постоянная, Дж·М/К;
Rатм - сила сопротивления атмосферы на заданной орбите;
![]() - радиус Земли, км;
- радиус Земли, км;
![]() - ларморовский радиус электронов,
- ларморовский радиус электронов, ![]()
![]() - ларморовский радиус ионов,
- ларморовский радиус ионов, ![]()
![]() - радиус наконечника катода,
- радиус наконечника катода, ![]()
![]() - расстояние от оси движителя до полюсных наконечников,
- расстояние от оси движителя до полюсных наконечников, ![]()
![]() - больший радиус тора, ресивера,
- больший радиус тора, ресивера, ![]()
![]() - характерный размер отверстия в электродах, м;
- характерный размер отверстия в электродах, м;
![]() - меньший радиус тора, ресивера,
- меньший радиус тора, ресивера, ![]()
![]() - площадь боковой поверхности бака,
- площадь боковой поверхности бака, ![]()
![]() - площадь боковой поверхности ресивера,
- площадь боковой поверхности ресивера, ![]()
![]() - площадь отверстий в ионно-оптической системе,
- площадь отверстий в ионно-оптической системе, ![]() ;
;
![]() - полная площадь сечения ПИД, м
- полная площадь сечения ПИД, м![]() ;
;
![]() - площадь проволоки соленоида,
- площадь проволоки соленоида, ![]()
![]() - характерная площадь поперечного сечения космического аппарата,
- характерная площадь поперечного сечения космического аппарата, ![]() ;
;
![]() - эффективная площадь сечения движителя, м
- эффективная площадь сечения движителя, м![]() ;
;
T - период обращения спутника вокруг Земли, с;
![]() - критическая температура, при которой происходит фазовый переход р.т.,
- критическая температура, при которой происходит фазовый переход р.т., ![]()
![]() - температура максвелловских электронов, К;
- температура максвелловских электронов, К;
![]() - температура, до которой бак может разогреться в условиях космического пространства,
- температура, до которой бак может разогреться в условиях космического пространства, ![]()
![]() - максимальная температура, до которой ресивер может разогреться в УКП,
- максимальная температура, до которой ресивер может разогреться в УКП, ![]()
![]() - температура внутри ресивера,
- температура внутри ресивера, ![]()
![]() - принимаемая температура хранения р.т.,
- принимаемая температура хранения р.т., ![]()
![]() - время заполнения всего объёма ресивера, с;
- время заполнения всего объёма ресивера, с;
![]() - время цикла работы ресивера, с;
- время цикла работы ресивера, с;
![]() - ускоряющее напряжение между электродами ионно-оптической системы, В;
- ускоряющее напряжение между электродами ионно-оптической системы, В;
![]() - объём бака,
- объём бака, ![]()
![]() - скорость истечения рабочего тела,
- скорость истечения рабочего тела, ![]() ;
;
![]() - скорость космического аппарата на орбите, км/с;
- скорость космического аппарата на орбите, км/с;
![]() - объём ресивера,
- объём ресивера, ![]()
![]() - характеристическая скорость космического аппарата на орбите, км/с;
- характеристическая скорость космического аппарата на орбите, км/с;
Xe – ксенон, рабочее тело движителя;
![]() - напряжение разряда в газоразрядной камере, эВ;
- напряжение разряда в газоразрядной камере, эВ;
![]() - число ампер витков одной катушки;
- число ампер витков одной катушки;
![]() - суммарное число ампер витков;
- суммарное число ампер витков;
α – выработка рабочего тела из бака;
g - коэффициент складирования;
![]() - минимальная толщина стенки бака,
- минимальная толщина стенки бака, ![]()
![]() - минимальная толщина стенки ресивера,
- минимальная толщина стенки ресивера, ![]()
![]() - толщина ускоряющего электрода ионно-оптической системы, мм;
- толщина ускоряющего электрода ионно-оптической системы, мм;
![]() - толщина экранного электрода ионно-оптической системы, мм;
- толщина экранного электрода ионно-оптической системы, мм;
![]() - толщина стенки ресивера,
- толщина стенки ресивера, ![]()
![]() - прозрачность электродов;
- прозрачность электродов;
![]() - коэффициент полезного действия движителя;
- коэффициент полезного действия движителя;
![]() - плотность композиционного материала, из которого изготовлен бак,
- плотность композиционного материала, из которого изготовлен бак, ![]()
![]() – плотность воздуха на заданной орбите, кг/м3;
– плотность воздуха на заданной орбите, кг/м3;
![]() - плотность материала ресивера,
- плотность материала ресивера, ![]()
![]() - предел текучести,
- предел текучести, ![]()
![]() - предел прочности,
- предел прочности, ![]()
![]() - время существования космического аппарата, с;
- время существования космического аппарата, с;
![]() - максимальное время нахождения космического аппарата в тени Земли, с;
- максимальное время нахождения космического аппарата в тени Земли, с;
![]() - минимальное время нахождения космического аппарата на световом участке, с;
- минимальное время нахождения космического аппарата на световом участке, с;
![]() - потенциал ионизации рабочего тела, эВ;
- потенциал ионизации рабочего тела, эВ;
![]() - первый потенциал возбуждения рабочего тела, эВ;
- первый потенциал возбуждения рабочего тела, эВ;
ГРК – газоразрядная камера;
ДУ – двигательная установка;
ИОС – ионно-оптическая система;
ИСЗ – искусственный спутник Земли;
КА – космический аппарат;
КЛА – космический летательный аппарат;
КМ – композиционный материал;
КПД – коэффициент полезного действия;
ПИД – плазменно-ионный движитель;
СХПРТ – система хранения и подачи рабочего тела;
УКП – условия космического пространства;
ЭРД – электроракетный движитель;
ЭРДУ - электроракетная двигательная установка.
ВВЕДЕНИЕ
Развитие космических систем различного назначения позволяет в настоящее время ставить и решать многие научно-технические, оборонные и народнохозяйственные задачи непосредственно в космосе
В настоящие время главное внимание уделяется разработкам ЭРДУ для выполнения следующих задач:
· стабилизация спутников: компенсация внешних возмущающих сил, вызываемых микрометеоритами, градиентами гравитационных полей и давлением солнечной радиации, компенсация внутренних возмущений, вызываемых движущимися элементами спутника, в том числе различными маховичными системами;
· орбитальные: коррекция ошибок в запуске, компенсация гравитационных сил, вызванных несферичностью Земли, и давления солнечной радиации.
· в интересах народного хозяйства: использование околоземного пространства для практических задач совершенствования связи, метеорологии, навигации, геодезии, разведки полезных ископаемых, мобилизации дополнительных сельскохозяйственных ресурсов.
Электрореактивные двигатели (ЭРД) открыли новое направление в космическом двигателестроении. ЭРД отличаются от существующих космических двигателей, работающих на химических топливах, более высокой экономичностью, но одновременно значительно меньшей тяговооружённостью, возможностью получения малых единичных импульсов, большим числом включений. Вместе с тем разделение источников энергии и рабочего вещества в ЭРД и использование электромагнитного поля для ускорения рабочего вещества позволяет значительно (на один-два порядка) увеличить удельный импульс, а соответственно и экономичность ЭРД по сравнению с химическими реактивными двигателями. Это предопределяет области применимости ЭРДУ для космических летательных аппаратов с большими временами активного функционирования (5-10 лет).
Задание
Спроектировать электрореактивную двигательную установку на базе плазменно-ионного движителя для ориентации орбиты искусственного спутника Земли.
ИСХОДНЫЕ ДАННЫЕ:
Таблица 1
| 1. Орбита — круговая |
|
| 2. Время существования КА |
|
| 3. Характерный диаметр КА |
|
| 4. КПД ЭРД, движителя |
|
1 Расчет тяги ЭРД и определение его электрической мощности
Определим скорость КА на заданной орбите по формуле:
 (км/с);
(км/с);
где k – гравитационный параметр Земли;
R - средний радиус Земли 6371 км;
h - высота орбиты 400 км.
Движение космического аппарата зависит от возмущающих сил, которые постепенно изменяют элементы орбиты. В первую очередь на орбиту влияют несферичность орбиты Земли и неравномерность распределения масс на ее поверхности и в недрах. Возмущения орбиты возникают также из-за сопротивления земной атмосферы, притяжения других небесных тел, давление солнечного света. Главные возмущения спутниковых орбит вызваны несферичностью Земли и сопротивлением атмосферы.
Включение бортовой двигательной установки на базе ЭРД позволяет компенсировать эти возмущения. При определении тяги ЭРД можно предположить, что для поддержания КА на заданной круговой орбите ЭРД должен компенсировать потерю скорости аппарата, вызванную только сопротивлением, оказываемым атмосферой на заданной орбите:
![]() (1.1)
(1.1)
Sэфф — площадь поперечного сечения аппарата;
Сx=1..2 — коэффициент аэродинамического сопротивления;
ρb=1,57·10-11— плотность атмосферы на орбите h=400км.
Для начального расчета эффективную площадь можно определить из следующего выражения:
![]() (1.2)
(1.2)
Для выполнения своей задачи ЭРД включается периодически и время его работы составляет 10% от времени функционирования КА на орбите. Тяга ЭРД должна быть увеличена во столько раз, сколько уменьшено время работы двигателя.
РЭРД=![]()
Удельный импульс определим из выражения:
![]() (1.3)
(1.3)
![]() =0.7 - КПД электроракетного двигателя;
=0.7 - КПД электроракетного двигателя;
Вычисляем потребную электрическую мощность ЭРД:
![]() (1.4)
(1.4)
По полученному значению удельного импульса ![]() определяем тип ЭРД. Принимаем в качестве электрореактивного движителя ПИД.
определяем тип ЭРД. Принимаем в качестве электрореактивного движителя ПИД.
Для обеспечения работы ПИД в течение необходимого времени ЭРДУ должна включать в себя запас рабочего тела. Для того чтобы определить этот запас, необходимо знать расход рабочего тела через движитель. Частично ответ на этот вопрос может дать величина ионного тока. Однако не весь расход, превращаясь в ионы, покидает движитель в виде ионной струи. Часть нейтральных атомов рабочего тела не ионизируется в ГРК и проходит через электроды ИОС. Величиной, характеризующей степень совершенства использования рабочего тела, является hм, или коэффициент использования рабочего тела. Реально достигнутый диапазон hм лежит в пределах 0,8¸0,9. Выбрав оптимальную величину hм, определим реальный секундный расход рабочего тела. Для этого сделаем пересчет скорости истечения рабочего вещества из ПИДа:

 м/с (1.5)
м/с (1.5)
(1.6)
m•эд - реальный секундный расход рабочего тела.
Зная ресурс работы ЭРДУ, найдем общий запас рабочего тела:
![]() (1.6)
(1.6)
где kрт - коэффициент, учитывающий потерю рабочего тела при хранении (kрт~1,01÷1,05), принимаем равным 1,03.
Расчеты проведены по методическому пособию (1).
2 Разработка и описание теоретического чертежа размещения ЭРД на спутнике
На чертеже (ХАИ.06.441п.11.ТЧ.02.) приведен спроектированный космический аппарат (1). Фотоэлектрическая батарея (2) ориентирована и представляет собой 2 панели, в любом положении КА солнечные батареи обеспечивают потребную мощность. Космический аппарат предназначен для дистанционного зондирования Земли.
Двигательная установка (3) расположена таким образом, что вектор тяги проходит через центр масс аппарата, и лежит на одной прямой с вектором направления движения. По условиям задания КА должен двигаться по круговой орбите на высоте h=400км, и в любом месте орбиты продольная ось аппарата должна быть направленной на землю. Время функционирования составляет 10 процентов от времени существования КА, т.е. ![]() . Для выполнения данной задачи, недостаточно применения одного движителя, поэтому решено установить на КА два движителя, работающих посменно. После того как первый ПИД отработает свой ресурс, необходимо будет повернуть КА в пространстве так, чтобы вектор тяги резервного ПИДа проходил через центр масс КА и лежал на оси направления движения. На борту КА установлена измерительная аппаратура, позволяющая проводить исследование уровня радиации, зондировать поверхность Земли, измерять давление и температуру на соответствующей высоте.
. Для выполнения данной задачи, недостаточно применения одного движителя, поэтому решено установить на КА два движителя, работающих посменно. После того как первый ПИД отработает свой ресурс, необходимо будет повернуть КА в пространстве так, чтобы вектор тяги резервного ПИДа проходил через центр масс КА и лежал на оси направления движения. На борту КА установлена измерительная аппаратура, позволяющая проводить исследование уровня радиации, зондировать поверхность Земли, измерять давление и температуру на соответствующей высоте.
3 Разработка функциональной схемы двигательного блока. Описание схемы
Функциональная схема (ХАИ.06.441.11.СГ.03.) дает подробное представление о работе двигательной установки и представляет собой совокупность функциональных элементов соединенных между собой. На данной схеме представлены прямые и обратные связи, по которым происходит обмен информацией между элементами.
На функциональной схеме представлены следующие элементы
1. Система управления (СУ);
1. Энергоустановка КА;
2. Система управления двигательной установкой (СУДУ);
3. Система электропитания (СЭП);
4. СХПРТ;
5. Двигательный блок (ДБ).
Система управления имеет связи почти со всеми элементами схемы. Это объясняется тем, что она играет главенствующую роль в работе движителя – координирует работу других систем.
Энергоустановка снабжает энергией все элементы движительного блока. Она не является объектом разработки в данной курсовой работе, но без нее работа движителя невозможна. Она имеет прямые и обратные связи с системой управления.
Система хранения и подачи рабочего тела обеспечивает хранение рабочего тела (в нашем случае это ксенон) во время полета, а также дальнейшую его подачу в ДБ через сложную систему датчиков, которые четко регулируют как количество, так и давление рабочего тела в трубопроводе, клапанов, которые используют для своевременной подачи или отключения подачи рабочего тела в полость трубопровода или на его выходе и т.д.
ДБ на структурной схеме состоит из ДБ1 и ДБ2, так как это необходимо для повышения надежности. ДБ является потребителем электроэнергии и рабочего тела.
4 Инженерный расчёт ПИД
4.1 Принцип работы ПИД и схема его расчета
Для проведения инженерного расчёта ПИД необходимо изучить механизм, определяющий его работу и конструктивные особенности. Рисунок 4.1 иллюстрирует процессы, включающие в себя рождение и ускорение ионов. Электроны, эмитируемые катодом, ускоряются электрическим полем (возникающим благодаря напряжению, приложенному к разряду) и соударяются с нейтральными частицами рабочего вещества, ионизируя его. В результате таких столкновений образуются ионы и электроны. Ионы под действием электростатических полей движутся к ИОС, а электроны к аноду. Для увеличения времени жизни электронов, в ГРК движителя создают магнитные поля осевой, радиальной или пристеночной конфигурации. Степень ионизации зависит от энергии электронов и их концентрации в рабочем объёме ГРК, а также от концентрации рабочего вещества. Концентрация рабочего вещества зависит от тяги движителя, которую необходимо обеспечить, и является функцией массового расхода, энергия электронов зависит от тока и напряжения катода.
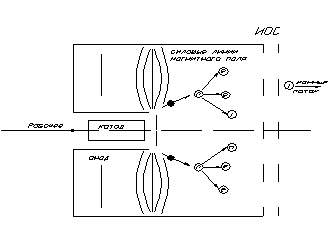
Рисунок 4.1 Схема столкновений в ГРК ПИД.
На рисунке 4.1 чёрными точками обозначены первичные электроны, которые при столкновении с нейтральными атомами (обозначенные буквой n в кружочке) образуют пару электрон-ион. Под действием электростатических сил электроны движутся к аноду, а ионы к ИОС. Столкновения электронов с нейтральными частицами рабочего тела приводит к появлению вторичных электронов и перераспределению между ними энергии. В ПИД первичные и вторичные электроны находятся совместно. Хотя концентрация первичных электронов мала (меньше 10% суммарной концентрации электронов), приблизительно половина всех актов ионизации происходит обычно при их участии.
Ионизация атомов рабочего тела происходит из возбуждённого состояния, реже из метастабильных состояний. Движение ионов в ГРК определяется главным образом потенциалом плазмы. При этом магнитное поле имеет небольшое влияние на направление движения ионов, поскольку величина ларморовского радиуса ионов как минимум на порядок превышает характерный размер движителя.
Ион-ионные столкновения слабо влияют на общее направление движения ионов, т.к. ионы ускоряются в основном в направлении градиента потенциала плазмы, а, следовательно, все ионы в заданной точке двигаются в одном общем направлении. Следовательно, ион-ионные столкновения должны мало влиять на движение потока ионов.
Часть ионов, которая движится к ускоряющим электродам, пересекает плазменный слой около экранирующего электрода и, ускоряясь напряжением в несколько киловольт, покидает электроды ИОС систему ПИД, создавая тягу движителя.
4.2 Выбор рабочего тела для ПИД
На первичном этапе разработки ПИД в качестве рабочих тел использовали металлы. Их выбор был связан в основном с самими ускорителями, а не определялся всей проблемой КЛА в целом. Металлы предпочтительны из-за своего большого атомного веса, высокой плотности рабочего тела, а в случае цезия – из-за низкого потенциала ионизации. Однако, при использование металлических рабочих тел возникает проблема их конденсации на КА, а в случае применения больших космических ЭРДУ существенным является и цена рабочего тела. В связи с этим появляется интерес к газообразным рабочим телам. При выборе рабочего тела необходимо принимать во внимание весь комплекс требований предъявляемых к рабочему веществу. Не одно рабочее тело не обладает такими свойствами, которые одновременно удовлетворяли бы всем предъявляемым к нему требованиям. Поэтому при выборе рабочего тела следует классификацию требований по их значимости для проектируемого движителя, которые определяются конструктором.
В расчёте данного движителя предпочтение отдаётся газообразным рабочим веществам, что связано с простотой СХПРТ, работающем на газообразном рабочем теле, и его малой массой, а также высокой надёжностью ЭРДУ в целом. При выборе рабочего тела необходимо учитывать его удельные и энергетические характеристики. Желательно использовать такие вещества, у которых низкий потенциал ионизации в сочетании с большой молекулярной массой. Низкий потенциал ионизации определяет минимальные затраты энергии подводимой на катод для ионизации рабочего вещества. Масса иона рабочего тела определяет тяговые характеристики движителя, а также объём рабочего вещества, который необходимо запасти для функционирования движителя в течение заданного промежутка времени.
Из всех газообразных веществ, используемых в качестве рабочего тела для ЭРД, в данном проекте выбирается инертный газ ксенон, который имеет малый потенциал ионизации при высокой молекулярной массе иона.
4.3 Расчет параметров ионно-оптической системы
Скорость истечения рабочего тела для ионного движителя равна (для однократно заряженных ионов):
(4.1)
где е – заряд электрона (1,6∙10-19 Кл);
mi– масса иона ( для ксенона ![]() );
);
Uуск – напряжение между электродами ионно-оптической системы, В.
Но так как ν известно из формулы (1.5), то из формулы (4.1) определяем необходимое ускоряющее напряжение:
 (4.2)
(4.2)
 Выражение для тяги ионного движителя с однократно заряженными ионами запишем так:
Выражение для тяги ионного движителя с однократно заряженными ионами запишем так:
(4.3)
где PЭРД – тяга ПИД, Н;
Ii – ток ионного пучка, А.
 Из выражения (4.3) можем определить ток ионного пучка Ii, необходимый при заданном напряжении U для получения тяги R:
Из выражения (4.3) можем определить ток ионного пучка Ii, необходимый при заданном напряжении U для получения тяги R:
(4.4)
Ионно-оптическая система является одним из основных узлов, определяющих работу плазменно-ионного движителя. Точные расчеты, проектирование и изготовление ее электродов увеличивает тяговый КПД движителя и его ресурс.
При расчете и проектировании ионно-оптических систем необходимо учитывать закономерности интенсивных ионных течений в стационарных электрических полях в условиях вакуума. Мерой интенсивности течений является его первеанс Р, определяемый как отношение тока пучка Ii к ускоряющему напряжению U в степени три вторых:
 (4.5)
(4.5)
Плотность тока для случая одномерного течения однозарядных ионов между плоскими параллельными электродами записывается следующим образом:

(4.6)
где j – плотность тока в ПИД, А/м2;
εо – электрическая постоянная, равная 8,85∙10-12 Ф∙м-1;
d – расстояние между электродами ИОС, м;
δэкр – толщина экранного электрода, м;
δуск – толщина ускоряющего электрода, м;
е – заряд электрона, Кл;
mi– масса иона, кг.
Принимаем δэкр=1∙10-3 м, δуск=1.5∙10-3 м (1).
Выбор расстояния между электродами d зависит от нескольких факторов: во-первых, так как к электродам ИОС приложены различные потенциалы, то действует электростатическая сила схлопывания; во-вторых, неравномерные тепловые потоки вызывают температурные напряжения в сетках, которые приводят к их деформации (в результате этого локальное изменение зазора может быть очень большим); в-третьих, так как между электродами ИОС приложено высокое напряжение, то уменьшение зазора может привести к нарушению диэлектрической прочности и, как следствие, к высоковольтному пробою, что нарушает работу движителя и может вывести его из строя. Примем допускаемую напряженность электрического поля равной Еmax=106 В/м. Таким образом, зная напряжение между электродами ИОС и выбрав допустимую величину Еmax, можем определить зазор между электродами:
 (4.7)
(4.7)
 Вычисляем плотность ионного тока в пучке:
Вычисляем плотность ионного тока в пучке:
(4.8)
 Таким образом, подсчитав плотность тока в ПИД, определим эффективную площадь сечения:
Таким образом, подсчитав плотность тока в ПИД, определим эффективную площадь сечения:
(4.9)
 Полная площадь сечения ПИД:
Полная площадь сечения ПИД:
(4.10)
где α – прозрачность электродов, показывающая, какую часть от полной поверхности электрода составляет суммарная площадь всех отверстий.
Из формулы (1.16) видно, что чем больше α, тем более совершенна ионно-оптическая система. Однако максимальная величина α ограничена двумя факторами: во-первых, ресурсом, во-вторых, технологическими возможностями. Более существенным является второй фактор. Следствием большой прозрачности является малая толщина перемычки между отверстиями. В случае получения отверстия методом сверления максимальная прозрачность будет равна α=0,7.
Следовательно, выбрав величину α, можно определить Sполн:
По Sполн находим диаметр ПИД:
(4.11)
 Важной характеристикой фокусируемых пучков является их геометрический параметр, равный отношению диаметра цилиндрического пучка 2∙ro к расстоянию d между электродами ускорителя, в котором сфокусирован пучок:
Важной характеристикой фокусируемых пучков является их геометрический параметр, равный отношению диаметра цилиндрического пучка 2∙ro к расстоянию d между электродами ускорителя, в котором сфокусирован пучок:
(4.12)
Опыт создания фокусирующих систем показывает, что фокусировка интенсивных пучков с геометрическим параметром, большим 1-3, представляет собой трудноразрешимую задачу. При R0>3…5 градиенты потенциала в направлении, перпендикулярном оси пучка, становятся столь значительными, что формирование параллельного пучка с помощью внешних фокусирующих электродов становится практически невозможным. Исходя из вышесказанного, задаемся значением R0=2. Считаем, что диаметр отверстий в электродах ускоряющей системы ПИД равен диаметру цилиндрического пучка, тогда получим:
![]()
![]()
 Зная диаметр, а, следовательно, и площадь одного отверстия, находим их общее число:
Зная диаметр, а, следовательно, и площадь одного отверстия, находим их общее число:
(4.13)
Наиболее оптимальной является сферическая конструкция ИОС. Её преимуществом (по сравнению с плоской) является однонаправленное изменение формы электродов под действием тепловых нагрузок, в результате чего межэлектродный зазор меняется в процессе работы на незначительную величину. Кроме того, сферические электроды обладают повышенной жёсткостью, что увеличивает их резонансную частоту.
Большое значение для нормальной работы ИОС имеет правильный выбор материала на основе сравнительного анализа наиболее важных характеристик и свойств. Материал сеток должен обладать следующими свойствами: высокой температурой плавления, хорошей теплопроводностью, максимальной работой выхода, хорошей технологичностью. Для изготовления электродов выбираем молибден, т.к. это один из наиболее подходящих материалов, отвечающий перечисленным требованиям.
При конструировании электродов ИОС необходимо выполнять следующие требования:
1. Конструкция должна обеспечивать минимальное изменение величины межэлектродного зазора. В процессе работы ПИД число высоковольтных пробоев должно быть сведено к минимуму.
2. Масса конструкции должна быть минимальной.
3. Резонансная частота сетки должна быть больше 200Гц.
Последнее требование вызвано наличием вибрационных нагрузок, которые испытывает КА при старте с Земли, при выходе на орбиту. Уровень частот вибраций лежит в пределах 130-180 Гц.
4.4 Расчет параметров газоразрядной камеры ПИД
Одним из главных параметров газоразрядной камеры является напряжение разряда ![]() . Эта величина зависит от многих факторов и, прежде всего, от первого потенциала ионизации
. Эта величина зависит от многих факторов и, прежде всего, от первого потенциала ионизации