Машины постоянного тока параллельного возбуждения
Министерство образования РФ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Факультет Автоматики и электромеханики
Кафедра Электрические машины и аппараты
МАШИНЫ ПОСТОЯННОГО ТОКА ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ
Реферат по дисциплине «Электрические машины»
Исполнитель
студент группы 7А91 _____________________Вакер В.С.
(подпись, дата)
Руководитель
доцент, к.т.н. _____________________Игнатович В.М..
(подпись)
_____________________
(дата)
Томск-2002
Введение.
Электрические машины постоянного тока широко применяются в различных отраслях промышленности.
Значительное распространение электродвигателей постоянного тока объясняется их ценными качествами: высокими пусковым, тормозным и перегрузочным моментами, сравнительно высоким быстродействием, что важно при реверсировании и торможении, возможностью широкого и плавного регулирования частоты вращения.
Электродвигатели постоянного тока используют для регулируемых приводов, например, для приводов различных станков и механизмов. Мощности этих электродвигателей достигают сотен киловатт. В связи с автоматизацией управления производственными процессами и механизмами расширяется область применения маломощных двигателей постоянного тока общего применения мощностью от единиц до сотен ватт.
Генераторы постоянного тока общего применения в настоящее время используются реже, чем электродвигатели, поскольку значительное распространение получают ионные и полупроводниковые преобразователи.
Электродвигатели и генераторы постоянного тока составляют значительную часть электрооборудования летательных аппаратов, Генераторы постоянного тока применяют в качестве источников питания; максимальная мощность их достигает 30 КВт. Электродвигатели летательных аппаратов используют для привода различных механизмов; мощность их имеет значительный диапазон – от долей до десятков киловатт. На самолетах, например, устанавливается более 200 различных электродвигателей постоянного тока. Двигатели постоянного тока широко используются в электрической тяге, в приводе подъемных устройств, для привода металлорежущих станков. Мощные двигатели постоянного тока применяются для привода прокатных станов и на судах для вращения гребных винтов. Постоянный ток для питания двигателей получается с помощью генераторов постоянного тока или выпрямительных установок, преобразующих переменный ток в постоянный.
Генераторы постоянного тока являются источником питания для промышленных установок, потребляющих постоянный ток низкого напряжения (электролизные и гальванические установки). Питание обмоток возбуждения мощных синхронных генераторов осуществляется во многих случаях от генераторов постоянного тока (возбудителей).
В зависимости от схемы питания обмотки возбуждения машины постоянного тока разделяются на несколько типов ( с независимым, параллельным, последовательным и смешанным возбуждением).
Ежегодный выпуск машин постоянного тока в РФ значительно меньше выпуска машин переменного тока, что обусловлено дороговизной двигателей постоянного тока.
Основные элементы конструкции МПТ
В машинах постоянного тока насажанный на вал роторный сердечник вместе с заложенной в его пазах якорной обмоткой обычно называется якорем. Якорь машины постоянного тока вращается в магнитном поле, создаваемом обмотками возбуждения 1, надетыми на неподвижные полюсы 2 (рис 1). По проводникам 6 нагруженной якорной обмотки проходит ток. В результате взаимодействия полей обмоток возбуждения и якорной создается электромагнитный момент, возникновение которого можно также объяснить взаимодействием тока якорной обмотки с магнитным потоком машины.
Из технологических соображений сердечник полюсов обычно набирается на шпильках из листов электротехнической стали толщиной 0,5—1 мм (рис. 2). Одна сторона полюса прикрепляется к станине, часто при помощи болтов, другая — располагается
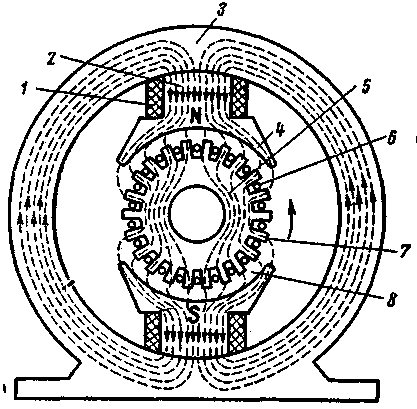
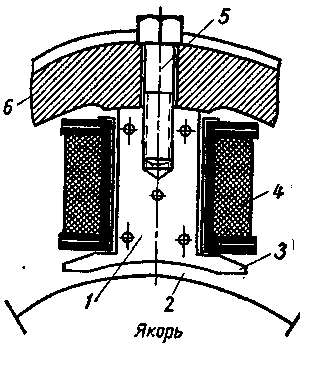
Рис. 1. Устройство машины постоянного тока:
1 — обмотка возбуждения; 2 — полюсы; 3 — ярмо; 4 — полюсный наконечник; 5 — якорь; 6 — проводники якорной обмотки; 7 — зубец якорного сердечника; 8 — воздушный зазор машины
Рис. 2. Полюс машины постоянного тока:
2 — полюсный сердечник; 2 — воздушный зазор; 3 — полюсный наконечник; 4 — обмотка возбуждения 5 — болт для крепления полюса; 6 — ярмо
вблизи якоря. Зазор между полюсом и якорным сердечником является рабочим воздушным зазором машины. Со стороны, обращенной к якорю, полюс заканчивается так называемым полюсным наконечником, форма и размер которого выбираются таким образом, чтобы способствовать лучшему распределению потока в воздушном зазоре. На полюсе размещается катушка обмотки возбуждения. Иногда в малых машинах полюсы не имеют обмотки возбуждения и выполняются из постоянных магнитов. Часть станины, по которой проходит постоянный магнитный поток, называется ярмом.
Основная часть потока Ф (см. рис. 1), создаваемого обмоткой возбуждения, идет через сердечник 2 северного полюса N, воздушный зазор 8, зубцы 7 и спинку якоря 5, после чего поток проходит аналогичный путь в обратной последовательности к южному соседнему полюсу S и через ярмо 3 возвращается к северному полюсу N. Поток Ф проходит замкнутый путь, который показан на рис. 1 линиями магнитной индукции. Полярность полюсов чередуется (северный, южный, северный и т. д.).
На рис. 3, а представлено распределение магнитной индукции в воздушном зазоре двухполюсной машины в функции геометрического угла α. Начало координат и выбрано посередине между полюсами. В этой точке значение индукции равно нулю. По мере приближения к полюсному наконечнику индукция возрастает, сначала медленно (до точки а) у края полюсного наконечника, а затем резко. Под серединой полюсного наконечника в точке индукция имеет наибольшее значение. Кривая распределения индукции располагается симметрично относительно оси полюса и в точке с, находящейся посередине между полюсами, проходит через нуль, затем индукция меняет знак. Кривая cde является зеркальным отображением относительно оси абсцисс кривой oabc. 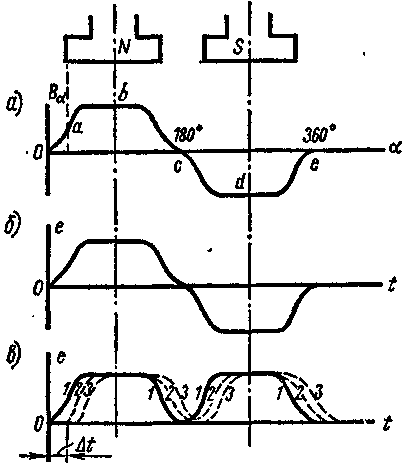 Области, в которых индукция имеет положительное и отрицательное значение, чередуются. В общем случае машина может иметь р пар полюсов. Тогда при полном обходе всего воздушного зазора разместится пространственных периодов изменения индукции, так как каждый период соответствует длине поверхности сердечника якоря, расположенной под двумя полюсами. Например, в четырехполюсной машине (р=2) имеются два пространственных периода (рис. 4). В теории электрических машин, кроме угла αг, измеряемого в геометрических градусах, пользуются также понятием угла αэ, измеряемого в электрических градусах. Принимают, что каждому пространственному периоду изменения кривой распределения индукции соответствует электрический угол αэ=360 эл. град или 2π эл. рад. Поэтому
Области, в которых индукция имеет положительное и отрицательное значение, чередуются. В общем случае машина может иметь р пар полюсов. Тогда при полном обходе всего воздушного зазора разместится пространственных периодов изменения индукции, так как каждый период соответствует длине поверхности сердечника якоря, расположенной под двумя полюсами. Например, в четырехполюсной машине (р=2) имеются два пространственных периода (рис. 4). В теории электрических машин, кроме угла αг, измеряемого в геометрических градусах, пользуются также понятием угла αэ, измеряемого в электрических градусах. Принимают, что каждому пространственному периоду изменения кривой распределения индукции соответствует электрический угол αэ=360 эл. град или 2π эл. рад. Поэтому
Подобные работы: