Программно управляемый генератор линейно-нарастающего напряжения сверхнизкой частоты на микроконтроллере
Генераторы линейно – изменяющегося напряжения называют иногда генераторами развёртки, хотя этот термин не отражает их гораздо более широкого применения. Из области разверток заимствованы названия двух основных частей пилообразного импульса: прямой ход (главный, почти линейный участок t п ) и обратный ход (сравнительно короткий участок t о, форма которого обычно несущественна).
Пилообразное напряжение это такое напряжение, которое нарастает или спадает линейно в течение некоторого отрезка времени, называемого временем рабочего хода tо достигает первоначального значения. Такое напряжение используется устройствах сравнения, для горизонтальной развёртки электронного луча в электронно-лучевой трубке в других устройствах. Возврат луча в исходное положение должен происходить, возможно, быстрее, вследствие чего спадающий участок пилообразного напряжения должен иметь большую крутизну и малую продолжительность.
Пилообразные импульсы можно получить с помощью любого релаксатора: мультивибратора, одно вибратора или блокинг-генератора. Поэтому генераторы пилообразного напряжения составляют особый класс импульсных устройств и заслуживают специального рассмотрения. Генераторы линейно-изменяющегося напряжения являются широко известными устройствами импульсной техники. В данной курсовой работе будет рассмотрено создание генератора линейно-спадающего напряжения на МК ATMega8515.
1. Обзор аналогичных устройств
1.1Простейший генератор пилообразного напряжения (ГПН)
В простейшем случае, когда не требуется высокая линейность рабочего участка выходного напряжения, применяют заряд (рисунок 1.1,а) или разряд конденсатора через резистор R. После размыкания ключа Кл конденсатор заряжается по закону:
u=E(1-e -t/τ), где τ=RC.
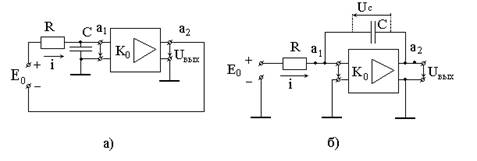
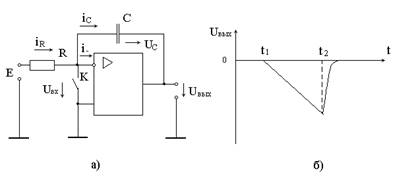
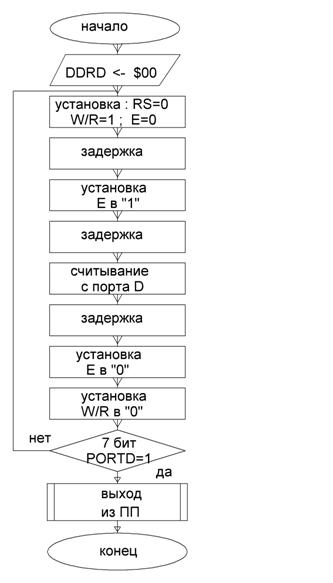
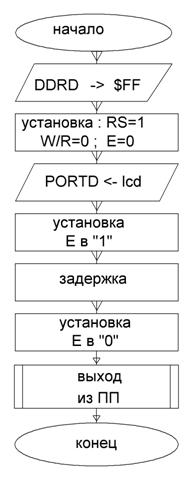
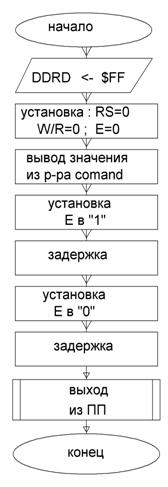
Если во время рабочего хода использовать лишь начальный участок экспоненты, т.е. при tраб<<τ, или, другими словами, при Um< ε=Um/E. (1.1) Можно определить ε и по формуле ε=Um/E=1-e-tраб/τ≈ tраб/τ. Из (1.1) следует, что коэффициент нелинейности ε оказывается равным Um/E. Обычно это соотношение называется коэффициентом использования источника питания. При этом для получения достаточно малого значения ε приходится выбирать значение E во много раз большим амплитуды Um т.е. плохо использовать напряжение источника питания. Таким образом, простейшая схема с зарядом или разрядом конденсатора через резистор оказывается пригодной лишь при сравнительно невысокой линейности (примерно 10%). Принципиальная схема простейшего ГПН с транзисторным ключом и соответствующие временные диаграммы напряжения приведены на рисунке 1.1б и 1.1в согласно(2). Рисунок 1.1-Принципиальная схема ГПН с транзисторным ключем и соответствующие временные диаграммы Как уже указывалось выше, принцип действия схем генераторов пилообразного напряжения заключается в использовании заряда или разряда конденсатора во время рабочего хода через стабилизатор тока. Учитывая принципиальную общность почти всех применяемых на практике схем генераторов, целесообразно рассматривать их как варианты одной и той же схемы. При этом они отличаются друг от друга, главным образом, лишь способом создания напряжения в цепи стабилизатора тока. Согласно (2) по этому классификационному признаку различают следующие типы генераторов: 1). Генераторы, в которых стабилизатор тока реализован в виде отдельного структурного элемента со специальным источником напряжения Ест. 2). Генераторы, в которых источник напряжения Ест стабилизатора тока реализован в виде заряженного конденсатора. Необходимо отметить, что этот генератор по другому классификационному признаку часто относят к группе компенсационных устройств. Идея построения таких устройств основана на том, что стабилизация зарядного (или разрядного) тока конденсатора С может быть достигнута, если последовательно с ним включить источник, напряжение которого изменяется по тому же закону, что и на конденсаторе С, но имеет обратную полярность. Роль такого источника напряжения выполняет усилитель. В зависимости от способа включения усилителя различают схемы с положительной и отрицательной обратной связью. Рисунок 1.2- компенсационный генератор с ООС (а), с ПОС(б). На рисунке 1.2а показан вариант функциональной схемы компенсационного генератора с положительной обратной связью (ПОС): если коэффициент усиления усилителя К0=+1, то повышение потенциала в точке а1 при заряде конденсатора С компенсируется точно таким же повышением потенциала в точке а2, и зарядный ток i останется неизменным. Конечно, в практических схемах вследствие того, что коэффициент усиления К0 не остается в процессе работы постоянным и точно равным 1, а так же в результате нестабильности других параметров схем наблюдается определенное не постоянство тока i и большее или меньшее значение коэффициента нелинейности напряжения на конденсаторе и выходного напряжения uвых. Генератор, реализующий функциональную схему на рисунке 1.2а, называют компенсационным генератором с ПОС. 3). Генераторы, в которых роль источника напряжения стабилизатора тока выполняет источник питания схемы. Такой генератор по другому классификационному признаку относится к компенсационным генераторам с ООС (отрицательной обратной связью); функциональная схема такого генератора показана на рисунке 1.2б. Интегрирующее включение операционного усилителя, обеспечивающего получение выходного напряжения, пропорционального интегралу от входного напряжения, предполагает включение конденсатора в цепь отрицательной обратной связи. Поэтому генераторы пилообразного напряжения на операционных усилителях строят по принципу генераторов с обратной связью, интегрирующих постоянное напряжения источника питания, которое для них является входным. На рисунке 1.3а показана схема генератора пилообразного напряжения с интегрирующей RC-цепочкой, включенной в цепь отрицательной обратной связи операционного усилителя. 2. Обоснование выбранного варианта технического решения Преимущества реализации генератора линейно нарастающего напряжения на микроконтроллере: -компактность прибора; -возможность программного управления устройством; -простота схемного решения; -точность формирования импульсов различной частоты; -простое управление режимом работы с помощью клавиатуры; -отображение частоты генерируемых импульсов на ЖКИ. Схема разрабатываемого генератора приведена на чертеже РТ 468.524.008 ЭЗ. В схеме применяется микроконтроллер фирмы ATMEL – ATMega8515. Микросхема создана на основе ядра Mega, имеет в своём составе 8-разрядный и 16-разрядный таймеры для формирования временных задержек и 4 порта для ввода и вывода информации с внешних устройств. Основные технические характеристики микроконтроллера: -Форма входного сигнала -произвольная -Максимальная амплитуда входного сигнала, 20В -Дискретность отсчета частоты, 10Гц -Время измерения, 100мс -Период повторения измерений, 200 мс -Напряжение питания, 5В Цифровое значение амплитуды необходимо подавать на ЦАП, который преобразовывает его в аналоговую форму. В работе был использован параллельный восьмиразрядный ЦАП AD5601 фирмы Analog devices. Регулировка амплитуды производится потенциометром R1, подключенным ко входу управления ЦАП. Так как нагрузка низвоомная( 50 ОМ), то для согласования сопротивления нагрузки с выходом устройства, применяется эмитерный повторитель на транзисторе 2N636. Для преобразования выходного сигнала микроконтроллера из уровня TTL в более мощный сигнал, а также для согласования устройства с нагрузкой (генератор работает на низкоомную нагрузку), используется выходной каскад. В качестве выходного каскада применён транзистор VT1. При появлении на выводе 6 импульса, он поступает через резистор R4 на базу VT1. В связи с тем, что величина импульса значительно меньше напряжения на эмиттере, т.е. база имеет менее положительный потенциал, транзистор открывается на время, равное длительности импульса. Резистор R4 ограничивает выходной сигнал микроконтроллера до значения, необходимого для нормальной работы транзистора VT1. В то время, когда открыт транзистор, в нагрузке протекает ток источника питания, т.ё. на нагрузке появляется импульс с амплитудой, равной амплитуде напряжения питания. Таким образом, осуществляется усиление последовательности импульсов. Так как выходом является коллектор, а такая схема включения имеет низкое выходное и достаточно высокое входное сопротивление, то этот каскад успешно выполняет функцию согласования выхода микроконтроллера с нагрузкой, так как по ТЗ генератор должен работать на низкоомную нагрузку. Применены непроволочные тонкослойные металлодиэлектрические резисторы марки C2-23 постоянного сопротивления. У данных резисторов в качестве резистивного элемента используется тонкая плёнка слоя проводящего металла, поэтому они характеризуются повышенной теплостойкостью. Резисторы имеют невысокую стоимость. Питание генератора осуществляется с помощью трансформатора, выпрямительного мостика и интегрального стабилизатора 78LR05. Изменение частоты сигнала осуществляется матрицей кнопок 4х4. Индикация частоты осуществляется алфавитно-цифровым ЖКИ с контроллером HD44780. Так как необходимо выводить не более 16ти символов, занимающих одну строку, был выбран символьный ЖКИ формата 16х1 WH1601B фирмы Winstar. 3. Разработка принципиальной схемы устройства Для дискретного изменения частоты будет использована матричная клавиатура 4х4, подключенная к порту D микроконтроллера. К кнопкам клавиатуры програмно подключены подтягивающие резисторы во избежание «обрыва» на входе. Подтяжка работает следующим образом: в ненажатом состоянии сопротивление между нулём и входом очень велико, и через резистор на входе создаётся потенциал, воспринимаемый МК как логическая единица. При нажатии картина меняется: теперь резистор - относительно бесконечное сопротивление, а на пине - потенциал нуля. Клавиатура будет обеспечивать изменение частоты от 2 Гц до 32 Гц с шагом 2 Гц. По умолчанию будет установлен режим генерации частоты 2Гц. Цифровое значение амплитуды необходимо подавать на ЦАП, подключенный к порту С микроконтроллера. Регулирование амплитуды производится переменным резистором R1, подключенным ко входу управления ЦАП. Отображение генерируемой частоты в данном режиме будет осуществляться ЖКИ. Шина передачи данных на ЖКИ подключена к порту А микроконтроллера. Управляющие сигналы подключены к ножкам РВ0, РВ1, РВ2. Питание генератора осуществляется с помощью трансформатора, выпрямительного мостика и интегрального стабилизатора 78LR05. 4. Разработка алгоритма и программы функционирования устройства Алгоритм главной программы включает в себя следующие блоки: -инициализация МК. В данном блоке осуществляется инициализация стека, настройка портов(на ввод/вывод данных), конфигурирование первого таймер-счетчика, настройка/разрешение прерываний, загрузка констант. Ниже приведен листинг инициализации МК: .include "D:\0B54~1\9E9E~1\VMLAB\include\m8515def.inc" .def temp = r16 .def adr = r17 .def reg = r18 .def const0 = r19 .def const01 = r20 .def time = r21 .def lev =r22 .def Comand =r23 .def lcd =r24 .def x =r25 .equ E = 2 .equ RW = 1 .equ RS = 0 reset: rjmp start reti ; Addr $01 reti ; Addr $02 reti ; Addr $03 rjmp generation reti ; Addr $05 reti ; Addr $06 reti ; Addr $07 reti ; Addr $08 reti ; Addr $09 reti ; Addr $0A reti ; Addr $0B reti ; Addr $0C reti ; Addr $0D reti ; Addr $0E reti ; Addr $0F reti ; Addr $10 ; Program starts here after Reset start: ldi temp,$02 out SPH,temp ldi temp,$5F out SPL,temp ;====== настройка портов =========== ldi temp,$F0 out DDRD,temp ldi temp,$FF out PORTD,temp out DDRC,temp out PORTC,temp ;===== настройка Т1 и прерываний ==== ldi temp, $40 out TIMSK, temp ldi temp, $09 out TCCR1B, temp sei ;======== загрузка констант ======== ldi const0,0 ldi const01,$01 ldi lev,$00 ldi x, $00 ;===== режим по умолчанию ======== ldi temp, high($1E78) out OCR1AH, temp ldi temp, low($1E78) out OCR1AL, temp ldi adr,0 -инициализация ЖКИ. В данном блоке реализуется инициализацию ЖКИ: определение направления отображения, выбор направления сдвига и настройка развертки в одну строку. Настройка каждого из параметров происходит по следующему алгоритму: Рис. 4.1 — Алгоритм последовательности конфигурации ЖКИ Листинг инициализации ЖКИ ldi Comand,$0C ;определение режима отображения rcall gotov rcall LCD_Delay rcall zap_IR ldi Comand,$06 ; выбор направления сдвига rcall LCD_Delay rcall gotov rcall LCD_Delay rcall zap_IR ldi Comand,$38 ;развертка в одну строку rcall LCD_Delay rcall gotov rcall LCD_Delay rcall zap_IR -установка режима по умолчанию. Данный блок алгоритма включает в себя установку частоты по умолчанию, а также установку индикации по умолчанию. Листинг установки режима и индикации по умолчанию: ldi temp, high($1E78) out OCR1AH, temp ldi temp, low($1E78) out OCR1AL, temp ;=====Вывод надписи============== ldi lcd,$46 ;F rcall mm3 ldi lcd,$20 rcall mm3 ldi lcd,$3D ;= rcall mm3 ldi lcd,$20 rcall mm3 ldi lcd,$20 rcall mm3 ldi lcd,$32 ;2 rcall mm3 ldi lcd,$20 rcall mm3 ldi lcd,$48 ;H rcall mm3 ldi lcd,$7A ;z После инициализации МК, ЖКИ и установки режима по умолчанию следует реализовать динамический опрос клавиатуры, который представляет собой следующую последовательность действий: группы кнопок условно разбиты на "линейки" и "колонки". Сначала программно на выходах PВ0-PВ3 выставляются единицы, а на P40 - ноль. При этом включена первая колонка, и осуществляется проверка нажатия кнопок именно этой колонки. Затем первая колонка отключается, и подключается следующая, и т.д. Алгоритм опроса клавиатуры, который является частью главной программы, указан в чертеже РТ 468.524.008 П3, а ниже можно ознакомиться с листингом динамического опроса клавиатуры: forever: ldi reg,$7F ;маска 01111111 out PORTD,reg nop nop sbis PIND,0 ;проверка нажатия кнопки rjmp r3;переход к метке нажатия кнопки sbis PIND,1 rjmp r7 sbis PIND,2 rjmp r11 sbis PIND,3 rjmp r15 ldi reg,$BF ;маска 10111111 out PORTD,reg nop nop sbis PIND,0 rjmp r2 sbis PIND,1 rjmp r6 sbis PIND,2 rjmp r10 sbis PIND,3 rjmp r14 ldi reg,$DF ;маска 11011111 out PORTD,reg nop nop sbis PIND,0 rjmp r1 sbis PIND,1 rjmp r5 sbis PIND,2 rjmp r9 sbis PIND,3 rjmp r13 ldi reg,$EF ;маска 11101111 out PORTD,reg nop nop sbis PIND,0 rjmp r0 sbis PIND,1 rjmp r4 sbis PIND,2 rjmp r8 sbis PIND,3 rjmp r12 rjmp forever Как видно из блок-схемы алгоритма работы программы, в случае нажатия какой-либо кнопки, программа переходит на метку той кнопки, которая оказалась нажатой. Здесь с помощью первого таймер-счетчика устанавливается порог счета, который определяет частоту данного режима, а также вызывается подпрограмма замены символа, который отображает частоту данного режима. После чего программа возвращается обратно на метку forever, где снова начинается динамический опрос клавиатуры. Ниже приведен листинг блока обработки нажатий кнопок: r0: ldi temp, high($1E78) ;2Гц out OCR1AH, temp ldi temp, low($1E78) out OCR1AL, temp ldi lcd, $32 rcall zamena1 rjmp forever r1: ldi temp, high($F40) ;4Гц out OCR1AH, temp ldi temp, low($F40) out OCR1AL, temp ldi lcd, $34 rcall zamena1 rjmp forever r2: ldi temp, high($A60) ;6 Гц out OCR1AH, temp ldi temp, low($A60) out OCR1AL, temp ldi lcd, $36 rcall zamena1 rjmp forever r3: ldi temp, high($7A0) ;8Гц out OCR1AH, temp ldi temp, low($7A0) out OCR1AL, temp ldi lcd, $38 rcall zamena1 rjmp forever r4: ldi temp, high($618) ;10Гц out OCR1AH, temp ldi temp, low($618) out OCR1AL, temp ldi lcd,$31 rcall zamena ldi lcd,$30 rcall zamena1 rjmp forever r5: ldi temp, high($510) ;12Гц out OCR1AH, temp ldi temp, low($510) out OCR1AL, temp ldi lcd,$31 rcall zamena ldi lcd,$32 rcall zamena1 rjmp forever r6: ldi temp, high($45C) ;14Гц out OCR1AH, temp ldi temp, low($45C) out OCR1AL, temp ldi lcd,$31 rcall zamena ldi lcd,$34 rcall zamena1 rjmp forever r7: ldi temp, high($3D0) ;16Гц out OCR1AH, temp ldi temp, low($3D0) out OCR1AL, temp ldi lcd,$31 rcall zamena ldi lcd,$36 rcall zamena1 rjmp forever r8: ldi temp, high($358) ;18Гц out OCR1AH, temp ldi temp, low($358) out OCR1AL, temp ldi lcd,$31 rcall zamena ldi lcd,$38 rcall zamena1 rjmp forever r9: ldi temp, high($30C) ;20Гц out OCR1AH, temp ldi temp, low($30C) out OCR1AL, temp ldi lcd,$32 rcall zamena ldi lcd,$30 rcall zamena1 rjmp forever r10: ldi temp, high($2C6) ;22Гц out OCR1AH, temp ldi temp, low($2C6) out OCR1AL, temp ldi lcd,$32 rcall zamena ldi lcd,$32 rcall zamena1 rjmp forever r11: ldi temp, high($28B) ;24Гц out OCR1AH, temp ldi temp, low($28B) out OCR1AL, temp ldi lcd,$32 rcall zamena ldi lcd,$34 rcall zamena1 rjmp forever r12: ldi temp, high($259) ;26Гц out OCR1AH, temp ldi temp, low($259) out OCR1AL, temp ldi lcd,$32 rcall zamena ldi lcd,$36 rcall zamena1 rjmp forever r13: ldi temp, high($22E) ;28Гц out OCR1AH, temp ldi temp, low($22E) out OCR1AL, temp ldi lcd,$32 rcall zamena ldi lcd,$38 rcall zamena1 rjmp forever r14: ldi temp, high($208) ;30Гц out OCR1AH, temp ldi temp, low($208) out OCR1AL, temp ldi lcd,$33 rcall zamena ldi lcd,$30 rcall zamena1 rjmp forever r15: ldi temp, high($1E8) ;32Гц out OCR1AH, temp ldi temp, low($1E8) out OCR1AL, temp ldi lcd,$33 rcall zamena ldi lcd,$32 rcall zamena1 rjmp forever Был полностью описан алгоритм основной программы. Далее будет приведен алгоритм подпрограммы генерации и приведен ее листинг. Подпрограмма генерации вызывается по прерыванию от первого таймер-счетчика при нажатии кнопки. Прерывания предварительно разрешены в инициализации микроконтроллера: ldi temp, $40 ;настройка прерываний от Т1 out TIMSK, temp sei ; разрешение общих прерываний Генерация пилообразных импульсов была организована следующим образом: создана переменная, в которую изначально записано значение 0 и командой inc происходит увеличение значения переменной на 1, пока оно не достигнет 255. Далее сброс значения константы в ноль, и возобновление счета до порога. Блок-схема алгоритма подпрограммы генерации приведена на рис. 4.3. Листинг подпрограммы генерации generation: out PORTC, lev inc lev reti Как видно подпрограмма, соответствующая такому алгоритму генерации линейно-нарастающего напряжения, является оптимальной с точки зрения кода и выполняется за минимальное количество тактов. Весьма важным блоком программы является работа с ЖКИ. При установке режима по умолчанию на ЖКИ выводится следующее: «F = 2 Hz ». Далее при нажатии на кнопки изменяются лишь 4й и 5й символы, отображающие значение частоты, что происходит при помощи подпрограмм zamena и zamena1 соответственно. Для отображения на ЖКИ одного символа необходимо в переменную lcd записать значение символа, который необходимо отобразить, а далее проверить ЖКИ на готовность к общению и произвести запись в регистр DR. На рис. 4.4 приведен алгоритм вывода надписи на ЖКИ. Рассмотрим алгоритм, который реализован в подпрограммах готовности и записи в регистры IR и DR. Для этого на рис. 4.5 приведена а блок-схема алгоритма подпрограммы готовности, на рис.4.6а подпрограмма записи в регистр DR, на рис. 4.6б подпрограмма записи в регистр IR. Для осуществления работы с ЖКИ в каждой конкретной подпрограмме формируются необходимые в данном случае временные диаграммы :для случая записи в регистр IR и DR. Рис. 4.5 – Блок-схема алгоритма проверки ЖКИ на готовность Листинг подпрограммы готовности: gotov: ldi temp, $00 out DDRB,temp ldi temp, $FF out PORTB,temp out DDRA, temp mm1: ldi temp,0b00000010 out PORTA, temp rcall LCD_Delay sbi PORTA, E rcall LCD_Delay in temp, PIND rcall LCD_Delay cbi PORTA,E rcall LCD_Delay cbi PORTA,RW sbrs temp,7 ret rjmp mm1 Рис. 4.6 – Блок-схема алгоритма подпрограмм записи в регистр IR(a) и записи в регистр DR(б) Листинг подпрограммы записи в регистр IR zap_IR: ldi temp, $FF out DDRD,temp ldi temp, $00 out PORTA, temp out PORTD, Comand sbi PORTA,E rcall LCD_Delay cbi PORTA,E rcall LCD_Delay ret Листинг подпрограммы записи в регистр DR zap_DR: ldi temp, $FF out DDRD, temp ldi temp,0b00000001 out PORTA, temp rcall LCD_Delay out PORTD, lcd sbi PORTA,E rcall LCD_Delay cbi PORTA,E rcall LCD_Delay ret В подпрограммах замены указывается символ, который изменяется. Значение символа указывается непосредственно в блоке обработке нажатия кнопки. В случае если изменяется один выводимый на ЖКИ знак, вызывается подпрограмма zamenа (единицы), в случае изменения десятков дополнительно вызывается подпрограмма zamena1. Листинг подпрограммы замены единиц (zamenа) и десятков(zamena1): zamena: ldi Comand, $84 mm2: rcall LCD_Delay rcall gotov rcall LCD_Delay rcall zap_IR rcall LCD_Delay rcall gotov rcall LCD_Delay rcall zap_DR ret zamena1: ldi Comand,$85 rjmp mm2 Как видно из листинга, необходимое время задержки реализуется подпрограммой задержки, использование которой является более оптимальной с точки зрения программного кода. LCD_Delay: ldi x,$04 L_loop: dec x brne L_loop ret Текст программы управления генератором линейно-нарастающего напряжения сверхнизкой частоты в полном объеме приведен в приложении А. 5. Результаты эмуляции в программы в пакете VMLAB Ниже приведены результаты эмуляции в пакете VMLAB, которые представляют собой полученные значения генерируемых частот, сведенные в таблицу 5.1. В качестве примера приводятся окно осциллографа программы, и отображаемая при этом на ЖКИ частота для второго и шестого режимов. Таблица 1 – Результаты эмуляции в пакете VMLAB Отображаемое на ЖКИ значение частоты соответствует генерируемой в данный момент частоте для всех 16ти режимов. Соответствие кнопок частоте и полученная при анализе частота генерации показаны в таблице 5.1. 6. Анализ временных соотношений и оценка погрешностей Расчет константы N, которая записывается в регистр сравнения первого таймер-счетчика выполняется по следующим соотношениям: Где 0.25 мкс – время тактирования генератора при тактовой частоте f=4МГц; Согласно техническому заданию расчет константы необходимо провести для шестнадцати режимов. Полученную константу N переведем в шестнадцатеричную систему. Соответственно ниже приведена таблица расчетов для 16ти частот: Табл. 2 – Расчет коэффициента N в зависимости от частоты Проектирование программно-управляемого генератора пачек прямоугольных импульсов на микроконтроллере Направляющие системы передачи ВОЛС Распространение волн в световодах Применение на судовых станциях автоматических идентификационных систем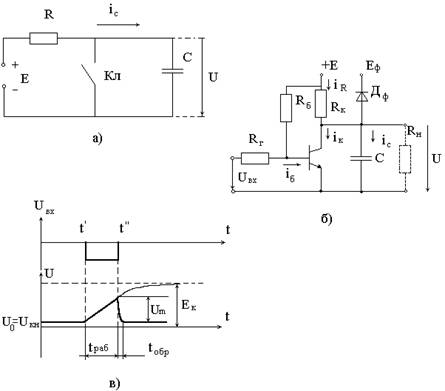
1.2Классификация ГПН со стабилизаторами тока
1.3 Генераторы пилообразного напряжения на операционных усилителях
![]() Разрабатываемое устройство должно генерировать линейно-нарастающее напряжение с дискретно-изменяющейся частотой и плавно-изменяющейся амплитудой. Принципиальная схема устройства приведена на чертеже РТ 468.524.008 ЭЗ.
Разрабатываемое устройство должно генерировать линейно-нарастающее напряжение с дискретно-изменяющейся частотой и плавно-изменяющейся амплитудой. Принципиальная схема устройства приведена на чертеже РТ 468.524.008 ЭЗ.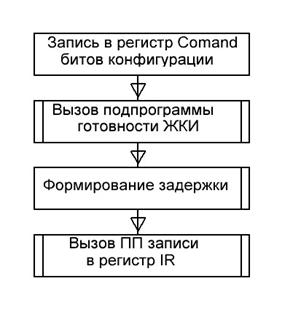
 а). б).
а). б).№ кнопки Задаваемая программно частота, Гц Полученная в ходе эмуляции частота, Гц 0 2.0 2.0 1 4.0 4.0 2 6.0 5.9 3 8.0 8.0 4 10.0 10.0 5 12.0 12.0 6 14.0 14.1 7 16.0 16.0 8 18.0 18.0 9 20.0 20.0 10 22.0 22.0 11 24.0 24.0 12 26.0 26.0 13 28.0 28.0 14 30.0 30.0 15 32.0 32.0 ![]() ,
, ![]()
F, МГц ![]() , мкс
, мкс![]()
![]()
2 1960 7800 1E78 4 976 3904 F40 6 664 2656 A60 8 488 1952 7A0 10 390 1500 618 12 324 1296 510 14 279 1116 45C 16 244 976 3D0 18 214 906 358 20 195 780 30C 22 175 700 2BC 24 162 648 288 26 148 592 Пассивные компоненты ВОЛС