Программы освоения Луны
Луна - наша ближайшая соседка в космическом пространстве. Но на расстоянии 384 000 км, разделяющем нас, невозможно увидеть детали размерами менее километра. И только развитие космических исследований открыло возможности для детального изучения лунной поверхности. Шестидесятые годы долго будут вспоминаться как десятилетие, ознаменовавшееся одним из величайших технических достижений человечества за всю историю его существования. После целой серии успешных исследований Луны с помощью автоматических станций 20 июля 1969 г. на лунную поверхность впервые ступила нога человека.
Но перед тем как создавать долгосрочную базу на Луне, необходимо в подробностях изучить лунную "действительность". Сюда входит выбор места поселения (с учетом перепадов температур и работы солнечных панелей), изучение возможности добычи кислорода "на месте", решение проблемы лунной пыли и многое другое.
Планетарные исследования преследуют несколько целей:
- познание в рамках сравнительной планетологии законов формирования и эволюции Земли
- определение условий возникновения и распространения жизни в солнечной системе
-освоение планет (в частности, Луны) как источника ресурсов, форпоста исследования дальнего космоса, базы для мониторинга астероидной опасности, контроля за развитием различных процессов и критических ситуаций на Земле. Ученые хотят знать, каковы были условия на Земле в первые сотни и миллионов лет ее существования, какова была температура нашей планеты в тот период, как происходила первичная дифференциация вещества на Земле, как и когда образовались первичная кора, атмосфера, океан, каков был их состав. (1)
1. Проблемы исследования луны
На Луне нет привычной для нас атмосферы, нет рек и озёр, растительности и животных организмов. Сила тяжести на Луне в шесть раз меньше чем на Земле. День и ночь с перепадами температур до 300 градусов длятся по две недели. И, тем не менее, Луна все больше привлекает землян возможностью использовать ее уникальные условия и ресурсы.
Луна представляется привлекательной объектом исследования из-за вероятного наличия там воды и других полезных ископаемых, которые могут быть использованы для решения задач энергетики на Земле и обеспечения полётов к планетам Солнечной системы. Вполне может оказаться так, что страны, приступившие к всестороннему освоению Луны первыми, окажутся в более выгодном стратегическом положении по сравнению с остальными государствами.
В настоящее время ведется проработка нескольких перспективных лунных проектов.
1.1 Опасности лунной пыли
Ученые и инженеры решают, как доставить космонавтов на Луну, создать там поселения и с помощью полезных ископаемых, добытых из лунного грунта, создать все необходимые вещи – от строительных материалов до ракетного топлива. Единственной серьезной проблемой для всех этих планов является вездесущая лунная пыль. Она попадает везде, набивается в герметичные уплотнители и обдирает поверхность скафандров. Также легко она накапливает электрический заряд, поэтому может парить над поверхностью Луны и прилипать к лицевым панелям скафандров и линзам камер. Возможно, она даже токсична.
Для решения этих проблем Лари Тейлор (Larry Taylor), профессор Университета шт. Теннеси предлагает переплавлять пыль во что-нибудь полезное. "Я являюсь одним из тех странных людей, которым нравится помещать вещи в обычную микроволновую печь, чтобы посмотреть, что из этого получится", - говорит он. Аналогичным образом он однажды поместил маленький образец лунного грунта, привезенный астронавтами программы Apollo, в печь и обнаружил, что он сплавился за 30 секунд при мощности всего 250 ватт.
Лунная почва - реголит - образуется, когда микрометеориты врезаются в камни и песок при скоростях в десятки километров в секунду, расплавляя их в стекло. Оно содержит нанометровые вкрапления чистого железа. Именно они эффективно концентрируют энергию микроволновых лучей, превращая все остальное рыхлое вещество в цельные куски. (1)
Проведенный в микроволновой печи эксперимент позволил Тейлору предложить образец лунных машин, которые будут переплавлять лунную пыль в полезные материалы. Аналогичным образом предлагается создавать и радиотелескопы. При этом машины будут плавить стенки подходящего лунного кратера.
Однако технические трудности пока остаются. Плавление лунной пыли в микроволновой печи на Земле не совсем похоже на тот же самый процесс в условиях Луны. Исследователи должны будут проработать все детали процесса, чтобы создать прочный, однородно расплавленный материал. Между тем, идея является многообещающей: таким способом можно изготавливать стартовые площадки для ракет, дороги, кирпичи для строительства и многое другое.
1.2 Лунные пылевые бури
Каждое лунное утро, когда Солнце впервые освещает ее поверхность после двухнедельной ночи, начинается странная буря. В следующий раз, когда вы будете смотреть на Луну, отметьте линию терминатора (линию, разделяющую лунный день и ночь). Именно здесь и происходит пылевая буря, простирающаяся от южного до северного полюса, следующая за линией терминатора.
Хотя большинство и не слышало об этом, ученые крайне уверены, что подобные бури – реальность. Доказательства были получены из старого эксперимента, выполненного в ходе программы Apollo, LEAM (Lunar Ejecta and Meteorites, Лунные выбросы и метеориты). "Астронавты Apollo 17 установили оборудование LEAM на Луне в 1972 году. – поясняет Тимоти Стаббс из Отделения изучения Солнечной системы NASA. – Оно было нацелено на регистрацию пыли, выбитую маленькими метеоритами при ударах о поверхность Луны".
Миллиарды лет назад метеориты бомбардировали Луну практически непрерывно, разрушая горные породы. Именно по этой причине там так пыльно. В настоящее время удары тоже продолжаются, хотя и значительно реже.
Еще более удивительным было то, что уже через несколько часов после лунного восхода солнца температура оборудования взлетала так высоко, что его приходилось отключать из-за перегрева. Это может быть объяснено тем, что электрически заряженная пыль прилипала к приборам, приводя к поглощению, а не отражению света, предполагает Олхоефт.
Однако точных объяснений никто не имеет. LEAM действовала очень короткое время: 620 ночных часов и всего 150 дневных.
Возможно, что астронавты также наблюдали лунные бури. Так, при полетах вокруг Луны, экипажи Apollo 8, 10, 12, и 17 отмечали "сумеречные лучи", где солнечный свет частично проходил через пыль, висящую над поверхностью. Такое происходило во время каждого лунного восхода и заката. Космический аппарат Surveyor также фотографировал сумеречные отблески горизонта, во многом похожие на то, что видели астронавты. Может, возможно наблюдать пылевые бури и с Земли.
Понимание процессов, происходящих на Луне, крайне важно. К 2018 NASA планирует высадку людей на ее поверхность. В отличие от астронавтов Apollo, никогда не присутствовавших при лунном восходе Солнца, новые исследователи должны будут основать постоянное поселение. Стена пыли, возникающая утром, может быть прозрачной, невидимой и безвредной. Или, наоборот, она может представлять серьезную проблему. Для решения этой задачи необходимы дальнейшие исследования. (1)
2. Трехмерная карта луны
Космическое агентство NASA выложило в интернет трехмерные карты Луны великолепного качества. С помощью специальной программы можно тщательно изучить поверхность нашего спутника.
В дистрибутиве программы NASA World Wind содержатся полные карты лунной поверхности.
Максимальное разрешение составляет 20 метров на пиксель - это гораздо выше, чем на сайте Google Moon. Кроме того, никогда еще мы не имели возможность увидеть Луну в трехмерной графике. Это первая программа такого рода. Изначально программа NASA World Wind, как и Google Earth, и другие аналогичные проекты, была разработана для визуализации земных картографических данных. Вся территория Земли отснята с разрешением 15 метров на пиксель, в то время как территория США - 1 метр/пиксель, а густонаселенные территории - 0,33 метра/пиксель. В новой версии 1.3, выпущенной в октябре, впервые появились карты Луны.
Сверхподробные карты лунной поверхности были получены с лунного спутника Клементина. Запущенный в начале 1994 г., этот спутник за два месяца своей работы сделал более 1,8 млн. фотоснимков. Это терабайты данных, которые отныне стали доступными для всех.
NASA World Wind — полностью трёхмерный интерактивный виртуальный глобус, созданный исследовательским центром НАСА им. Эймса космическим агентством NASA (рис. 1) (2,3)
2.1 Программа NASA World Wind
NASA World Wind использует несвободную лицензию с открытым исходным кодом. Из-за используемых при разработке технологий (C#, DirectX) программа работает только под управлением операционных систем семейства Windows NT. (4) Геопортал NASA World Wind имеет расширяемую архитектуру. Существуют плагины для работы с GPS, для отображения облачности, землетрясений, ураганов в приближенно к реальному времени и ряд других. В геопортале используется принцип открытой структуры, Open Source Agreement позволяет пользователям модифицировать саму программу, создавая к ней дополнения и расширения, а также составлять собственные подборки данных. Учитывая наличие уже готовых модулей, это превращает World Wind в уникальное средство для научных исследований и обучения.(6)
луна вода космический спутник
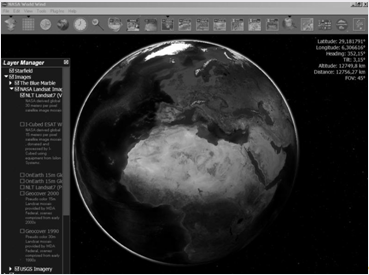
Рис. 1 Виртуальный глобус геосервиса NASA World Wind
Текущая версия 1.4 от 14.2.2007. Размер программы: 45 Мб (модуль Blue Marble - 124 Мб). Распространяется бесплатно. NASA World Wind требует для работы Windows 2000 или XP, процессора Intel Pentium 3 на 1 ГГц, AMD Athlon или выше, широкополосного доступа в интернет, 2 ГБ дискового пространства, окружения .NET и - самое главное - графической карты с поддержкой 3D-функций. Программа NASA World Wind распространяется бесплатно под свободной лицензией с открытым исходным кодом(5,6).
3. Вода на луне и новые технологии
В середине ноября 2009 года NASA сообщило, что присутствие водяного льда в кратерах у южного полюса доказано. Именно наличие воды считается важнейшей предпосылкой быстрого освоения Луны. Кроме того, вода ещё и дешёвое сырьё для производства ракетного топлива. Не исключено, что вместе с развитием новых ракетных технологий можно ожидать нового витка развития человечества. (7)
Неизбежно коренное техническое перевооружение космической отрасли. Космонавтика изменится так же, как изменилась авиация с приходом реактивных моторов. А они уже на подходе: в сентябре 2009 года американская компания Ad Astra Rockets успешно испытала самую крупную модификацию своего магнитоплазменного двигателя с переменным удельным импульсом (Variable Specific Impulse Magnetoplasma Rocket — VASIMR) VX-200. Так, электрические ракетные двигатели — плазменные и ионные — дают ничтожную тягу, измеряемую в граммах и долях грамма, а их удельная мощность смехотворна. Однако при этом электрические двигатели примерно в 10 раз экономичнее химических. Компании Ad Astra Rockets удалось создать электроракетный двигатель с приемлемой мощностью (500 г) и перспективой её дальнейшего наращивания. При этом плазма ни в одной точке не соприкасается с деталями аппарата, удерживаясь электромагнитными полями, — как следствие, он сможет работать много месяцев и даже лет без деградации конструкции.
На практике это означает, например, следующее. Химический способ "подтягивания" проседающей орбиты МКС предполагает расход 7,5 тонн горючего в год. Но на 2013 год NASA планирует переложить эту работу на новую плазму, съедающую всего около 300 кг рабочего вещества (аргона) ежегодно. При этом энергию для работы двигателя станция получит от солнечных батарей. Экономия — двадцатикратная. (8)
3.1 Поиск воды на луне этап первый
Космический телескоп Hubble сделал серию фотографий Луны в ультрафиолетовых лучах, чтобы найти подходящее место для высадки будущих экипажей, как сообщается на сайте NASA. Поскольку на Луне нет даже следов атмосферы, для длительного пребывания там астронавтов нужны кислородсодержащие минералы, которые теперь пытаются обнаружить на снимках.
Астрономы отмечают, что эту задачу нельзя назвать обычной для Hubble, поскольку телескоп изначально предназначался для наблюдений за более удаленными и менее яркими объектами. Однако новые снимки получились самыми детализованными из всех, которые когда-либо были сделаны земными или околоземными приборами.
После того, как в 60-х годах прошлого века на землю были доставлены первые образцы лунного грунта, там был найден ильменит - смешанный оксид титана и железа, откуда в принципе можно извлечь кислород. Поскольку ильменит присутствовал в районе приземления американского корабля Apollo 17, фотографии этого участка приняли за эталон, с которым следует сверять остальные.
Астрономы считают, что залежи минерала находятся также внутри 40-километрового кратера Аристарх, на необычный вид которого в ультрафиолетовых лучах впервые обратили внимание еще в 1911 году. Впрочем, из-за высокой радиоактивности этого участка, которую связывают с распадом радона, высадка там едва ли возможна. (11)
Известно, что NASA собирается до 2018 года снова отправить людей на Луну. Что касается извлечения кислорода, то этот процесс собираются сначала в деталях отработать на Земле, причем аэрокосмическое агентство объявило уже два конкурса на лучшую технологию. (2,3)
3.2 Поиск воды на луне этап второй
![]() 17 июня к Луне отправятся два спутника НАСА: LRO (орбитальный зонд) с российским нейтронным детектором ЛЕНД (LEND, Lunar Exploration Neutron Detector) на борту и LCROSS (аппарат для исследования лунных кратеров).
17 июня к Луне отправятся два спутника НАСА: LRO (орбитальный зонд) с российским нейтронным детектором ЛЕНД (LEND, Lunar Exploration Neutron Detector) на борту и LCROSS (аппарат для исследования лунных кратеров).
Миссия главным образом направлена на получение более подробной информации о лунной поверхности. Спутники будут делать снимки высокого разрешения, которые впоследствии станут изучаться учеными (рис.2)
После перелета разведчик LRO выйдет на рабочую окололунную орбиту высотой 50 км, с которой будет вести с помощью ЛЕНДа поиск водяного льда на Луне.
В целом миссия LRO призвана обеспечить решение трех практических задач освоения Луны. Во-первых, исследовать оптимальные районы посадок на нее перспективных автоматических и пилотируемых аппаратов. Во-вторых, провести разведку водных ресурсов и потенциально полезных ископаемых в лунных недрах. В-третьих, изучить радиационную обстановку на Луне с точки зрения воздействия на человеческий организм. (9)
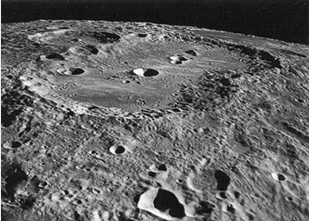
Рис.2 Поверхность Луны с высоты 110 км
3.2.1 О приборе LEND
Прибор ЛЕНД был предложен группой российский и американских ученых и победил на конкурсном отборе НАСА для включения в состав научно-измерительного комплекса космического аппарата LRO. Американские специалисты примут участие в обработке и анализа данных измерений. Примечательная особенность проекта в том, что он находится не в ведении управления НАСА, отвечающего за космическую науку, а относится к управлению, курирующему работы по освоению космоса. (12)
В основе работы ЛЕНДа лежит принцип регистрации вторичных нейтронов, которые рождаются под воздействием космических лучей в приповерхностном слое грунта толщиной 1-2 м. При этом нейтроны частично поглощаются и замедляются ядрами основных породообразующих элементов. Выходящий из грунта поток нейтронов зависит от состава слагающих его веществ и в первую очередь – от присутствия в нем водорода и водородосодержащих соединений. Отслеживая изменения в поглощении, детекторы нейтронов могут с орбиты определять изменения содержания водорода в поверхностном слое. Поскольку водород - один из двух основных компонентов воды, то тем самым можно оценить ее количество в грунте. (9)
3.2.2 Голубой лед
Дополнительную информацию о воде на Луне может дать "бомбардировка" ее поверхности, предложенная специалистами Исследовательского центра им. Эймса (Калифорния). Суть проекта, получившего обозначений "Голубой лед" (Blue Ice), в том, чтобы использовать резервные мощности РН "Атлас-5" для выведения в космос одновременно с основным космическим аппаратом LRO еще одного небольшого исследовательского зонда, нашпигованного оптической, спектральной и другой аппаратурой. Ему дали наименование LCROSS, т.е. Lunar Crater Observation and Sensing Satellite ("Спутник для наблюдений и замеров в лунном кратере").
Разгонный блок "Атласа-5" - его последняя ступень - "Центавр" массой свыше двух тонн врежется в лунную поверхность. При этом облако обломков лунных пород и пыли должно подняться на высоту свыше 9 км. Спустя примерно 10 мин. через это облако пролетит зонд LCROSS и выполнит его анализ.
Как несложно догадаться, данный полет зондов является первым шагом на пути освоения поверхности Луны для дальнейшей возможной ее колонизации. Этот естественный спутник Земли – ближайший плацдарм человеческой экспансии, где очевидно, будут созданы первые внеземные базы. Их обитателям понадобится как вода, так и ее компоненты – кислород и водород. Первый для дыхания, второй – как топливо для ракет, опять же в сочетании с кислородом. Если вода на Луне будет найдена, то ее не придется доставлять с Земли, что значительно облегчит лунную колонизацию. Кроме того, спутники нацелены на поиски источников ресурсов и на ряд других задач, связанных с испытанием новейших технологий.
На протяжении четырех месяцев космические аппараты будут изучать лунную поверхность, а затем отправятся исследовать "темную сторону" спутника Земли. (8,9)
Поиск завершен. Этап последний
В Вашингтон 13 ноября Национальное управление по аэронавтике и исследованию космического пространства США (НАСА) сообщило в пятницу об обнаружении воды на Луне.
9 октября НАСА запустило космический аппарат "ЛКРОСС" и ракету "Центавр" к кратеру Кабеус, находящемуся примерно в 100 км от южного полюса Луны. Зонд должен был выявить наличие воды на Луне.
Как заявили представители НАСА, первоначальные данные, полученные в результате исследования, свидетельствуют о том, что "в ходе миссии, к счастью, удалось обнаружить воду". (10)
4. Некоторые алгоритмы обработки данных
4.1 Предварительный фрактальный тест
Как правило, структура естественных ландшафтов самоподобна в большом диапазоне размеров. Например, лунные кратеры с поперечниками от 10Е1 м до 10Е4 м имеют почти одинаковую форму. В отличие от самоподобных естественных ландшафтов, структура искусственных объектов выражена в более узком диапазоне размеров. Следовательно, возможные артефакты на изображении должны проявляться как аномалии в распределении пространственных деталей по размерам. В поиске таких аномалий и заключается смысл фрактального метода М.Стейна и М.Карлотто (лит.12, 13). К сожалению, их метод требует слишком много вычислений для обработки всех подходящих HIRES-изображений (около 80.000).
Поэтому для той же цели использовался альтернативный, более простой алгоритм. Пусть M(r) есть распределение вероятности расстояний между локальными минимумами яркости вдоль горизонтальной строки изображения. Таким образом M(r) описывает распределение деталей изображения по размерам. На больших шкалах эту функцию можно аппроксимировать степенной функцией, характерной для фракталов:
![]() (1)
(1)
Поскольку искусственные объекты имеют некий характерный размер, их присутствие должно увеличить среднеквадратичное отклонение M(r) от степенного закона, выражаемого линейной регрессией:
![]() (2)
(2)
где C является константой. Согласно эмпирическим результатам, M(r) у HIRES-изображений может быть аппроксимировано степенной функцией при r > 4 пикселов. Регрессия вычисляется при 4 < r < 31 пиксель (т.е. в диапазоне размеров от 50 до 900 м).
Изображение разбивается на K=12 квадратов по 96x96 пикселов каждый. В каждой такой области методом наименьших квадратов вычисляется наилучшие параметры степенной функции, и находится среднеквадратичное отклонение от нее:
![]() (3)
(3)
где k - номер квадрата изображения; gk - множитель, компенсирующий вариации чувствительности сенсора в различных частях изображения; N - число размеров (шкал). Средняя дисперсия оценивается по этим региональным среднеквадратичным отклонениям.
Анализ 733 HIRES-изображений, полученных через светофильтр на 0.75 микрона с орбит 112-115 (от полюсов вплоть до широт 75 градусов), показал что региональные среднеквадратичные отклонения распределяются по закону Гаусса. Согласно критерию Стьюдента для K=12 оценок, если в каком-либо квадрате выполняется неравенство
 (4)
(4)
эту область можно считать статистически аномальной с вероятностью 0,95.
4.2 Прямоугольный тест
Прямоугольный тест выявляет прямоугольные узоры на лунной поверхности. При этом для каждого пиксела изображения выбирается "пробный" пиксел, смещенный на 6 пикселов в направлении заданном позиционным углом. Пусть N есть полное число пар пикселов, а n - число пар, в которых яркости пикселов равны. Функция
![]() (7)
(7)
описывает анизотропию изображения, характеризуемую позиционным углом смещения. Для компенсации искажений, вносимых камерой и компрессией файла, при каждом значении позиционного угла эта функция делится на ее калибровочное значение, полученное усреднением по множеству изображений. Скорректированная функция сглаживается, и находятся позиционные углы, соответствующие максимумам функции. Эти углы описывают ориентацию разных групп линейных деталей. Если имеется различие выявленных направлений на 90 + 10 градусов, то изображение считается интересным.(15)
4.3 Алгоритм СХЕМА
Алгоритм СХЕМА выявляет локальные неровности лунного рельефа. Он обнаруживает локальные максимумы высоты лунной поверхности. Яркость "горизонтального" участка поверхности на вершине находится как средняя яркость изображения в круглом окне, описанном вокруг исследуемого пиксела с радиусом 15 пикселов. В направлении солнечного освещения выделяется цепочка из 5 пикселов, центрированная на исследуемый пиксел. Методом наименьших квадратов находится линейная зависимость между положением пиксела в цепочке и его яркостью. С помощью этой зависимости находится расчетное положение пиксела с яркостью "горизонтального" участка, лежащего на вершине. Вычисленный пиксел наносится на схему черной точкой. Эта операция повторяется для всех пикселов изображения. Сглаживание по пяти точкам позволяет выявлять детали, которые незаметны даже на SAAM-изображениях, но при этом теряется разрешение. Поэтому СХЕМА и SAAM-алгоритм не дублируют, а дополняют друг друга. (13,14)
Пример работы алгоритма СХЕМА показан на рис.4.
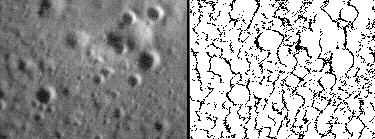
Рис.4. HIRES-изображение LHD0331A.062 (слева) и схема локальных возвышенностей, выявленных алгоритмом СХЕМА.
4.4 База данных информационной справочной системы номенклатуры лунных образований
Построение автоматизированных информационных справочных систем базы данных фотометрических параметров, морфологических характеристик и номенклатурных обозначений деталей рельефа на поверхности планет и спутниках.
Создана автоматизированная база данных информационной справочной системы номенклатуры лунных образований. В базе данных используется единая система номенклатурных обозначений лунного рельефа, утвержденная решением Международного астрономического союза (МАС). Категории лунного рельефа в системе МАС приведены в таблице. (14,16)
Таблица
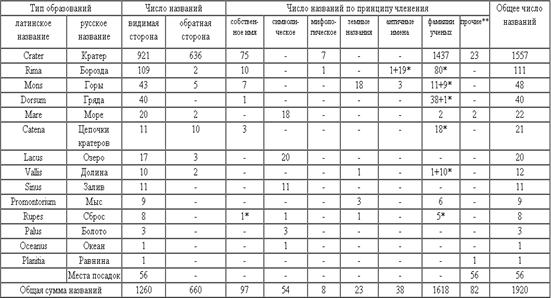
*-лунные образования, именованные по названию близлежащего кратера или пика.
**-лунные образования, именованные по названию лабораторий, институтов, городов, космических аппаратов.
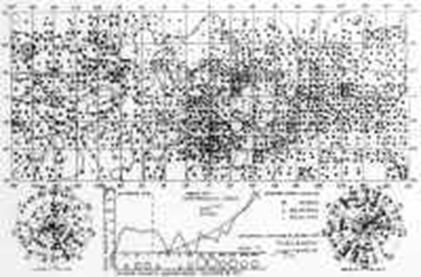
Рис. 3 распространение на луне именованных кратеров передает карта плотности именованных объектов диаметром от 2.5 до 50 км и более в пределах трапеций 10о * 10о
Метод математического моделирования был применен для изучения статистики распределения кратеров, лунок, отдельных камней и других элементов лунного рельефа. Составлен комплекс программ компьютерной обработки "морфологического каталога кратеров луны" для прогнозирования плотности распределения и оценки структуры мелких рельефных образований и относительного геологического возраста поверхности.
5. Пример одной программы
При выполнении расчётов было использовано программное приложение, разработанное на кафедре небесной механики, астрометрии и гравиметрии астрономического отделения физического факультета МГУ. Алгоритм вычисления теоретического значения результатов измерений движения Луны по орбите вокруг Земли на алгоритмическом языке Паскаль выглядит следующим образом (данные см Приложение 1): (17,18)
{ to make deal with the Lunar laser observations }
UNIT UnLunObs ;
INTERFACE
Uses
UnConTyp ; { for TVect3 for example }
Procedure TryMoonLaserObs ;
Procedure TryMoonReflCoor ( nscomp : Integer ) ;
IMPLEMENTATION
Uses
UnQLBinF , { for BinName and BinFile LaserObs of TLaserObs }
UnForPrt , { for protocol file PrtFile }
UnStCoor , { for station position in different system }
UnRefLun , { for Lunar reflector position BarCReflPos }
UnForTim , { for type TMoment }
UnParMod , { for type TParMod and ModelCor procedure }
UnVarDoi , { to try to improve some parameters }
UnPseudo , { for TypeDimM }
UnRefCor ; { for ToGetRefraCor }
{ a try to compare observations with calculations
observable value two-way time delay is in LaserObs.dobs in second }
Function ToGetLunaR ( obs : TLaserObs ; par : TParMod ) : Extended ;
Var
Eph1 : Extended ; { barycentric moment of fire }
Pos1 : TVect3 ; { station pos refer to Solar barycentre }
Eph2 : Extended ; { barycentric moment of reflection }
Pos2 : TVect3 ; { reflector position refer to Solar barycentre }
Eph3 : Extended ; { barycentric moment of receive in scale T_eph }
Pos3 : TVect3 ; { station position in receive moment }
utc3 : TMoment ; { receive moment scale UTC }
ref1 : Extended ; { the first correction for refraction in meter }
ref2 : Extended ; { the second correction for refraction in meter }
CelT : TMatr33 ; { celestial terrestrial matrix }
Begin
BarCStatPos(obs,par,obs.obst,Eph1,Pos1,CelT); { UnStCoor fire moment }
BarCReflPos(obs,par,Eph1,Pos1,Eph2,Pos2); { UnRefLun reflector }
ref1:=ToGetRefraCor(obs,Pos1,Pos2,CelT); { unit UnRefCor }
StatReceive(obs,par,Eph2,Pos2,Eph3,Pos3,CelT,utc3); { UnStCoor }
ref2:=ToGetRefraCor(obs,Pos3,Pos2,CelT); { unit UnRefCor }
ToGetLunaR:=86400*VelOfLight*(utc3.part-obs.obst.part) { two-way delay }
+1.0e-3*(ref1+ref2); { plus refraction two-way correction }
End;
Procedure ToWriteCurDif ( num : Integer ;
obs : TLaserObs ;
dif : Extended ) ;
Begin
WriteLn(num:6,obs.nsar:5,obs.nsto:6,
VelOfLight*obs.dobs:16:6,
dif:16:6,1.0e3*(dif-VelOfLight*obs.dobs):16:3);
WriteLn(PrtFile,num:6,obs.nsar:5,obs.nsto:6,
VelOfLight*obs.dobs:16:6,
dif:16:6,1.0e3*(dif-VelOfLight*obs.dobs):16:3);
End;
{ to read record by record from binary file with observations }
Procedure TryMoonLaserObs ;
Var
obs : TLaserObs ; { type from UnQLBinF }
par : TParMod ; { model differences to parameters from UnParMod }
dif : Extended ; { two way delay as calculated }
Begin
ModelCor(0,0,par); { nullo corrections from unit UnParMod }
Assign(BinFile,BinName); { all variables from UnQLBinF }
{$I-}
ReSet(BinFile);
{$I+}
If IOResult <> 0 Then Exit ; { no binary file }
NumObsCur:=0; { var in UnQLBunF count for observations in binary file }
WriteLn(PrtFile);
While NOT EOF(BinFile) Do
Begin
Read(BinFile,obs); { record LaserObs of TLaserObs from UnQLBinF }
NumObsCur:=NumObsCur+1; { the next record }
dif:=ToGetLunaR(obs,par); { simple actions }
ToWriteCurDif(NumObsCur,obs,dif);
End;
Close(BinFile);
End;
Procedure TryMoonReflCoor ( nscomp : Integer ) ;
Var
itr : Byte ; { count for variation }
nuc : Integer ;
obs : TLaserObs ;
par : TParMod ; { from unit UnParMod }
dif : Extended ;
dip : TypeDimM ;
sip : TypeDimM ; { type from UnPseudo }
Begin
ModelCor(0,0,par); { from UnParMod }
Assign(BinFile,BinName); { all variables from UnQLBinF }
{$I-}
ReSet(BinFile);
{$I+}
If IOResult <> 0 Then Exit ; { no binary file }
itr:=0; { for result without variation }
WriteLn('a try to adjust position Luna reflector ',nscomp);
WriteLn(PrtFile);
WriteLn(PrtFile,'a try to adjust position Luna reflector ',nscomp);
nuc:=0; { simple count }
Repeat
If itr > 0
Then
WriteLn('variation number',itr:3,',',nuc:6,' observations');
ReSet(BinFile);
nuc:=0; { count for selected observations in binary file }
While NOT EOF(BinFile) Do
Begin
Read(BinFile,obs); { record LaserObs of TLaserObs from UnQLBinF }
If obs.nsar = nscomp
Then
Begin
nuc:=nuc+1;
dif:=ToGetLunaR(obs,par); { simple actions in km }
DimVar(itr)^(nuc):=dif; { for variation }
If itr = 0
Then { residual }
DimObs^(nuc):=VelOfLight*obs.dobs-dif;
End;
End;
itr:=itr+1;
ModelCor(2,itr,par); { variation of itr coor of Lunar reflector }
Until itr > 3 ;
Close(BinFile);
ClcCorrections(nuc,dip,sip); { from unit UnVarDoi }
AfterCorPos(nscomp,dip,sip); { from unir UnRefLun correction to CorMop }
End;
END.
6. Модель Лунной Станции
Лунная исследовательская мобильная база "ЛИМБ" - "нулевой цикл" построения стационарного лунного обитаемого полигона универсального назначения:
- анализа и первичного освоения лунных энерго-материалоресур-сов;
- создания серии обсерваторий анализа Солнечно – Земных связей, астроисследований и наблюдения Земли;
- исследования потенциальных возможностей совершенствования земных служб связи, экологического мониторинга, анализа сырьевых ресурсов.
Параметры комплекса "ЛИМБ" позволяют:
- осуществить технологические наработки по характеристикам перспективных типовых лунных технических комплексов (ресурсных, энергетических, экологических, коммуникационных);
- подготовить материальную базу обитаемых систем, используя переработку лунного грунта (резервы кислорода, азота, воды, метана, гелия, углекислого газа и пр.);
- отработать технологию добычи и доставки на Землю экологически чистого ядерного топлива Гелий – 3 (3He);
- отработать технику программного и аварийного покидания Луны экипажем на базе ракетной системы, использующей топливо лунного производства (жидкие метан и кислород).
Масштабность "ЛИМБ" позволяет ограничится 6 – 7 пусками транспортной системы "Протон", существующей системы космической связи, российской производственной базой при реализации в течение 5 – 7 лет с затратами порядка четверти затрат на станцию "Мир" или одного процента на Международную Космическую Станцию ("МКС").
Состав и последовательность наращивания комплекса:
1. Комбайн Лунного Материалообеспечения ("КЛМ"). Мобильная система на базе "Лунохода" ("Ровера" - США), дополненная системой обработки грунта и сбора газообразных продуктов (ШАР - 1) формируется двумя запусками. Система снабжена зеркальным солнечным теплоэлектрогенератором мощностью "1 МВт и активно функционирует в течение лунных дней с ресурсами более 3-х лет.
2. Накопитель Обеспечивающей Продукции ("НОП"). Мобильная система координации работы комплекса связи с Землей, дистанционного управления элементами комплекса, потенциальный центр материального и энергетического обеспечения лунной обитаемой базы. Агрегат, использующий базу "Лунохода", снабжённый системой перекачки газообразных продуктов "КЛМ" и их доведения до потребительских кондиций (сжатия, сжижения, получения льда), хранения с использованием условий лунной ночи (изделие "Шар – 2"), формируется двумя запусками "Протона". Он снабжается солнечным теплоэнергогенератором мощность "0,1 МВт для работы обслуживающих систем, комплекса управления и связи с Землёй.
3. Ракетный Сектор Транспортировки ("РСТ"). Область действия - у поверхности Луны (с дальностью до полусферы), на трассах "Луна – искусственный спутник Земли ("ИСЛ"), "Луна – Земля", Луна – искусственный спутник Земли ("ИСЗ"), "ИСЛ – ИСЗ".
Серия строится с использованием лунного топлива (жидкие метан и кислород), унифицированных двигателей и баков. Для локальных окололунных операций обеспечивается мягкая посадка лунных обсерваторий, возврат и многократное использование ракет.
Она обеспечивается серией запусков "Протона" типовых машинных модулей, монтируемых и заправляемых на Луне, - развитием российских программ "Луна 15 - Луна 24".
Принципиальной особенностью системы обработка поверхностного слоя лунного грунта с имплантантами"солнечного ветра" является производство массы сопутствующей продукции (около 180 т при добыче 10 кг гелия – 3), включающей пары воды газообразные водород, гелий, этан, углекислый и угарный газы, азот.
Это определяет предпосылки создания самодостаточной безрасходной лунной базы с солнечными концентратором и термоэлектрогенераторами, использующей условия лунных дня и ночи, малой гравитации и космического вакуума. (20,21)
Производимые продукты (по структуре и массе) обеспечивают автономную систему жизнеобеспечения на 6 – 8 космонавтов, ракетное топливо (жидкие этан – кислород) окололунных операций и доставки обработанной продукции на Землю или орбиту ИСЗ, подготовленную структуру, радиопривод, площадку и начальное материальное обеспечение развёртываемой обитаемой станции.
Принципиально возможно предварительное создание спасательной ракеты возврата на Землю на тех же топливных компонентах, подготовленную заранее до прилёта первичного экипажа и находящуюся в дежурном режиме.
Программа строится на базе материалов по системам "Appolo", "Lunar Pathfinder" (США), российских разработок НПО им. С.А.Лавочкина, РКК "Энергия", Центра им. М.В. Хруничева, ЦНИИмаш, Научного Центра "Курчатовский институт", ГЕОХИ, ГАИШ, Исследовательского Центра им. М.В.Келдыша.
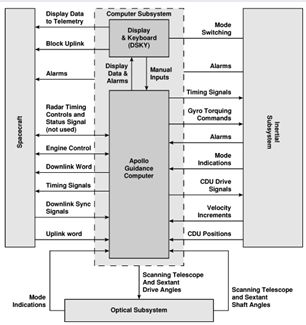
Как, наверное, всем известно, при полетах на Луну в кораблях Аполлон использовались бортовые ЭВМ - в командном модуле компьютер отвечал за коррекции орбиты при полете на Луну и обратно, орбитальные операции и за ориентацию CSM, в лунных модулях компьютер использовался для самой драматичной части полета - посадке на поверхность Луны, обеспечивая необходимый режим работы главного двигателя посадочной ступени, ориентацию и навигацию. И, конечно при орбитальных операциях по сближению и стыковке с CSM. Особенностью бортовых вычислительных систем Аполло была уникальность программного обеспечения каждой миссии. Это было вызвано, прежде всего, ограниченными возможностями ЭВМ того времени, в частности объемом памяти для хранения программ, различавшимися условиями и задачами программами полетов.
На снимке ниже приведена структура бортового вычислительного комплекса Аполло
YAAGC представляет собой виртуальную машину, в точности воспроизводящую архитектуру бортового компьютера Аполло, как утверждают авторы проекта, виртуальный AGC полностью соответствует своему железному предку - вплоть до времени выполнения программ, что позволяет в полной мере прочувствовать условия эксплуатации ЭВМ тех лет.
Проект Virtual AGC and AGS также реализовал свою версию ассемблера YUL - языка, который использовался для программирования полетных миссий Аполлон, наверное, кому-то это может быть интересным сточки зрения истории техники. Доступна вся информация о структуре и синтаксисе YUL, что делает возможным самостоятельное освоение языка, на котором летали Аполлоны.
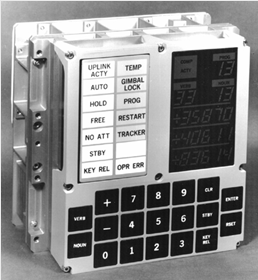
YADSKY - виртуальная панель (на снимке выше) дисплей и клавиатура, с помощью которых астронавты общались с бортовым компьютером Аполло, вводили программы и данные, проводили тесты и получали информацию о состоянии ЭВМ.
С помощью виртуальной машины AGS, которая может выполняться на Linux, Windows XP, Mac OS X 10.3 и выше (и даже FreeBSD), можно получить представление о методах и формах работы с бортовым компьютерам Аполло. (21)
Заключение
В данном курсовом проекте были рассмотрены основные проблемы освоения естественного спутника нашей планеты Земля, а также предлагаемые пути решения этих проблем. Следует отметить, что для более качественного и быстрого развития освоения космоса в целом немаловажную роль играет и современное программное обеспечение, мощные компьютеры и их процессоры, так как без аппаратных средств невозможно дальнейшее развитие человечества.
Показано, что компьютеризированная археологическая разведка Луны осуществима. Предложенные и апробированные алгоритмы могут использоваться для более интенсивного археологического обзора Луны и других планет.
Обработано приблизительно 80 тыс. орбитальных изображений Луны, переданных космической станцией "Клементина", и отобран ряд квази-прямоугольных узоров
Подводя итог можно сказать, что за довольно небольшой промежуток времени второй половины 20 века и начала 21 века сильно увеличились знания о Луне. Благодаря изучению Луны из космоса наука продвинулась вперед. Мы смогли увидеть обратную сторону Луны, составить подробные карты лунной поверхности, определить наличие магнитного поля, получить огромного количество фотографий, и самое главное: обнаружили воду. И все это было сделано на протяжении 60 лет.
Библиографический список
Исследование Солнечной Системы (Электронный ресурс) / Научные статьи; ред.Дружков А.,2005- .-Режим доступа http://galspace.spb.ru/nature.file/luna.html, свободный.-Загл. с экрана.
NASA World Wind (Электронный ресурс) / ред. Randolph Kim; Web-мастер NASA Patrick Hogan -2008-.- Режим доступа http://worldwind.arc.nasa.gov/index.html свободный.- Загл. с экрана.
Википе