Цифровые и адресные мгновенно-суммирующие расходомеры топлива
Введение адаптации в РТМС может привести к ряду преимуществ. Например, возможно уменьшить объем памяти и число регистрирующих устройств на земле, а при уменьшении частоты коммутации использовать менее быстродействующие коммутационные элементы. Для решения задачи измерения и передачи ряда параметров можно использовать различные адаптивные РТМС. Сравнение этих РТМС обычно осуществляют по следующим критериям:
-конструктивному;
-метрологическому;
-экономическому.
Конструктивный критерий рассматривает техническую осуществимость данной системы с точки зрения реализации следующих характеристик РТМС:
1. Числа параметров при заданной пропускной способности канала связи.
2. Необходимой скорости передачи информации при заданной допустимой задержке.
3. Используемого способа сжатия.
4. Возможности восстановления предаваемой информации на принимаемой стороне.
Метрологический критерий рассматривает предельное значение:
1. Показателя вероятности.
2. Вероятности появления заданной погрешности представляемой информации устройств сжатия данных.
3. Значения погрешности, появившейся от введения устройств сжатия данных.
4. Помехоустойчивости системы.
Экономический критерий рассматривает целесообразность введения адаптации в РТМС, т.е. определяет экономический выигрыш от сжатия информации. При введении адаптации в РТМС уменьшаются требуемая полоса частот КС, объем памяти системы, объем регистрируемых данных, масса бортовой аппаратуры, но сама система усложняется, поэтому возрастает ее стоимость.
Сравнение различных адаптивных РТМС необходимо производить при заданных статистических моделях параметров и заданных условиях функционирования всей системы. Обычно экономический эффект от внедрения системы сжатия данных составляет около 10% от стоимости всей системы, например, для системы "Аполлон" стоимостью 20 млд. $ экономический эффект от внедрения системы сжатия данных составил 240 млн. $.
Глава 1. Общие сведения о цифровых РТМС
Современные РТМС являются преимущественно цифровыми. Преимуществом цифровых РТМС перед другими типами РТМС является малая (менее 0,1%) погрешность передачи информации. Цифровые методы обеспечивают освобождение от помех при регенерации сигнала. В типовых РТМС с цифровой передачей преимущественно применяются двухступенчатая модуляция КИМ – ЧМ, а в космических РТМС – КИМ – ФМ и КИМ – ОФМ. В системах, обеспечивающих высокую информативность, используется трехступенчатая модуляция КИМ – ЧМ – АМ, КИМ – ЧМ – ЧМ, КИМ – ФМ – АМ. В большинстве типовых систем применяется двоичный код с числом информационных символов в кодовой комбинации (слове) от 5 до Слова дополняются вспомогательными символами, обеспечивающими их разделение на приемной стороне, а также обнаружение и исправление ошибок. В качестве кадрового сигнала синхронизации, обеспечивающего определение начала и конца телеметрического сигнала (кадра) используются определенные кодовые комбинации, которые не применяются для передачи информации, и которые после корреляционной обработки на приемной стороне позволяют сформировать короткий импульс, обеспечивающий точную временную привязку сигнала. Цифровые РТМС позволяют обеспечить информационную скрытность. Основной задачей при разработке цифровых РТМС является выбор типа кодера и вида модуляции, обеспечивающих минимальную полосу пропускания системы.
Глава 2. Функциональная схема цифровой РТМС
2.1 Передающая часть
Структура цифровой РТМС зависит от различных факторов: скрытности, помехоустойчивости, числа каналов, способа кодирования сообщений, системы сжатия данных, системы модуляции, методов синхронизации. Рассмотрим обобщенную функциональную схему бортовой аппаратуры цифровой РТМС (рисунок 1) с двухступенчатой модуляцией, здесь: БССО – бортовые системы сбора и обработки информации;
УС – устройство сжатия;
ФС – формирователь синхросигналов;
УК – устройство калибровки;
С – синхронизатор.
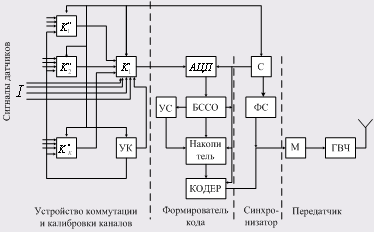
Рисунок 1
На схеме показана двухступенчатая коммутация каналов, причем через ![]() обозначен коммутатор первой ступени, а через
обозначен коммутатор первой ступени, а через ![]() - коммутаторы второй ступени. Группа обозначенная I каналов подключена непосредственно к
- коммутаторы второй ступени. Группа обозначенная I каналов подключена непосредственно к ![]() . Такое включение обеспечивает информационную гибкость. От устройства калибровки каналов (УК) на входы
. Такое включение обеспечивает информационную гибкость. От устройства калибровки каналов (УК) на входы ![]() подаются калибровочные сигналы, соответствующие 0 и 100% напряжения датчиков. Скорость переключения каналов
подаются калибровочные сигналы, соответствующие 0 и 100% напряжения датчиков. Скорость переключения каналов ![]() и
и ![]() разная и определяется частотой следования импульсов, поступающих от синхронизатора (С). Перед подачей на АЦП групповой АИМ-1 сигнал преобразуется в АИМ-2. это необходимо для того, чтобы на время кодирования значение сигнала не изменялось. АЦП должен обладать высоким быстродействием, чтобы время преобразования сигнала в цифровой код было равно или меньше длительности канального интервала. Далее сигнал в цифровой форме с выхода АЦП поступает на УС и БССО, а потом на накопитель (Н), который опрашивается с частотой переключения каналов. В накопителе с помощью сдвигающего регистра решается задача преобразования параллельного кода в последовательный. С выхода накопителя сигнал поступает на кодер, где осуществляется представление информации в избыточном коде, который используется в радиолинии. Для увеличения быстродействия используют несколько АЦП, работающих поочередно, но при этом увеличиваются габариты аппаратуры. Например, один АЦП обслуживает четные, а другой нечетные каналы. Иногда первый АЦП обслуживает одну группу каналов, а второй другую (рисунок 2). Управление работой всех блоков схемы 2 осуществляется синхронизатором. Сигналы с выхода кодера и формирователя сигналов синхронизации (ФСС) поступают на вход модулятора (М), управляющего работой генератора высокой частоты (ГВЧ).
разная и определяется частотой следования импульсов, поступающих от синхронизатора (С). Перед подачей на АЦП групповой АИМ-1 сигнал преобразуется в АИМ-2. это необходимо для того, чтобы на время кодирования значение сигнала не изменялось. АЦП должен обладать высоким быстродействием, чтобы время преобразования сигнала в цифровой код было равно или меньше длительности канального интервала. Далее сигнал в цифровой форме с выхода АЦП поступает на УС и БССО, а потом на накопитель (Н), который опрашивается с частотой переключения каналов. В накопителе с помощью сдвигающего регистра решается задача преобразования параллельного кода в последовательный. С выхода накопителя сигнал поступает на кодер, где осуществляется представление информации в избыточном коде, который используется в радиолинии. Для увеличения быстродействия используют несколько АЦП, работающих поочередно, но при этом увеличиваются габариты аппаратуры. Например, один АЦП обслуживает четные, а другой нечетные каналы. Иногда первый АЦП обслуживает одну группу каналов, а второй другую (рисунок 2). Управление работой всех блоков схемы 2 осуществляется синхронизатором. Сигналы с выхода кодера и формирователя сигналов синхронизации (ФСС) поступают на вход модулятора (М), управляющего работой генератора высокой частоты (ГВЧ).
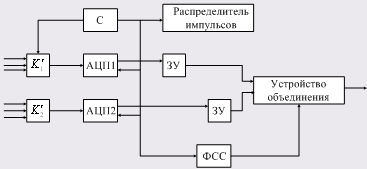
Рисунок 2
Возможно использование трех ступеней модуляции. Это позволяет увеличить число каналов (рисунок 3).
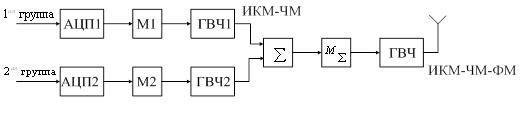
Рисунок 3
Сигналы первой и второй группы совпадают по времени. Частоты ![]() и
и ![]() ГВЧ1 и ГВЧ2 отличаются на величину ширины спектра КИМ сигнала.
ГВЧ1 и ГВЧ2 отличаются на величину ширины спектра КИМ сигнала.
Кроме того, типовая схема цифровой РТМС может включать: коммутаторы третьей ступени и устройства запоминания информации.
Состав наземной РТМС зависит от вида модуляции сигналов, метода выделения и формирования импульсов синхронизации, способа регистрации и отображения данных телеизмерений. На рисунке 4 изображена обобщенная функциональная схема наземной аппаратуры с двухступенчатой модуляцией и посимвольным приемом сигналов.
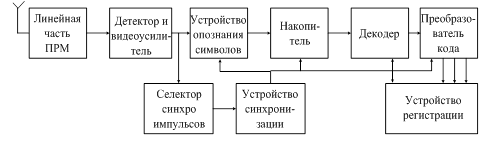
Рисунок 4
С выхода видеоусилителя сигнал поступает на устройство опознания символов и селектор синхроимпульсов, управляющий работой устройства синхронизации. Устройство синхронизации вырабатывает импульсы, необходимые для определения временных границ символов, слов и кадров. Устройство опознавания (или регенерации) символов определяет по выходному сигналу ПРМ, какие символы передавались. Для этого необходимы импульсы с частотой символов из УС. При передаче данных последовательным кодом символы принимаемых кодовых комбинаций запоминаются в накопителе, который управляется синхроимпульсами слов. Декодирующее устройство на основе анализа кодовой комбинации производит обнаружение и исправление ошибок. Если передача велась безызбыточным кодом, то декодирующее устройство отсутствует. Преобразователь кода осуществляет представление сигнала с выхода декодирующего устройства к виду удобному для регистрации данных.
Устойчивая работа приемной станции во многом зависит от помехоустойчивости кадровой синхронизации, синхронизации слов и символов. В современных цифровых РТМС используются три раздельные схемы для синхронизации символов, слов и кадров.
Структурная схема устройства синхронизации приведена на рисунке 5.
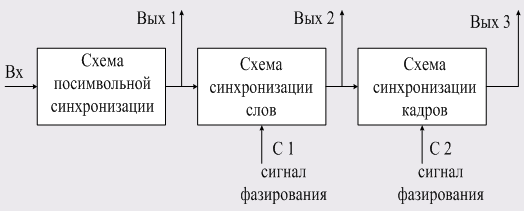
Рисунок 5
На вход устройства синхронизации (рисунок 5) поступает последовательность импульсов с селектора синхроимпульсов, которая содержит в своем спектре частоту следования символов ![]() . Схема синхронизации слов работает на принципе деления частоты
. Схема синхронизации слов работает на принципе деления частоты ![]() , где n – число символов в кодовой комбинации. Для фазирования схемы синхронизации слов используются импульсы, выделенные селектором синхропризнаков слов. Аналогично работает схема синхронизации кадров. Коэффициент деления этой схемы
, где n – число символов в кодовой комбинации. Для фазирования схемы синхронизации слов используются импульсы, выделенные селектором синхропризнаков слов. Аналогично работает схема синхронизации кадров. Коэффициент деления этой схемы ![]() , где N – число каналов РТМС. Для фазирования используются сигналы, выделяемые селектором маркеров кадра.
, где N – число каналов РТМС. Для фазирования используются сигналы, выделяемые селектором маркеров кадра.
Глава 3. Устройство сжатия телеметрических данных
Устройство сжатия предназначено для использования на борту космического аппарата. Обслуживает 480 каналов и обеспечивает ![]() при использовании алгоритма сжатия на основе предсказателя нулевого порядка. Устройство выполнено на интегральных микросхемах. Схема включения представлена на рисунке 6.
при использовании алгоритма сжатия на основе предсказателя нулевого порядка. Устройство выполнено на интегральных микросхемах. Схема включения представлена на рисунке 6.

Рисунок 6
Устройство сжатия приведенное на рисунке 7 содержит:
1. Справочное ЗУ – в нем хранится последний существенный отсчет для каждого информационного канала, пределы допуска (апертура) и знак приоритета. Когда на вход компаратора от АЦП поступает новая выборка данных, то из справочного ЗУ производится считывание последней переданной величины, пределов допуска и других сведений.
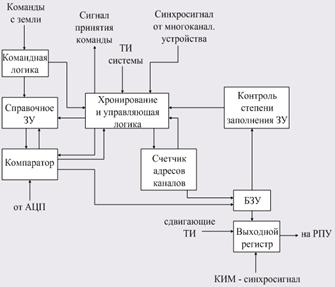
Рисунок 7
2. Компаратор – осуществляет операцию ![]() и сравнивает d и
и сравнивает d и ![]() (допуск апертуры). Если
(допуск апертуры). Если ![]() , то выборка вводится в справочное ЗУ, а также в буферное запоминающее устройство (БЗУ) и передается в РПУ.
, то выборка вводится в справочное ЗУ, а также в буферное запоминающее устройство (БЗУ) и передается в РПУ.
3. БЗУ – используется для временного запоминания существенных выборок, поступающих с непостоянной скоростью и преобразования их в поток данных с постоянной частотой следования.
4. Схемы хронирования и управления – вырабатывают сигналы, необходимые для управления устройства сжатия данных. Для хронирования используются тактовые импульсы (ТИ) системы и синхросигнал многоканального устройства (СИ). Упраляющая логика позволяет изменять пределы допуска (апертуру), принимать или отбрасывать существенные выборки в соответствии с сигналами от компаратора и схемы контроля степени заполнения БЗУ, а также по сигналам командной логики.
5. Счетчик адресов каналов – необходим для обращения к справочному ЗУ и для выдачи адреса при вводе данных в БЗУ.
6. Выходной регистр – преобразует данные из параллельной формы в последовательную. Скорость считывания задается тактовыми импульсами. Сигналы, передаваемые по линии связи содержат адресную информацию о принадлежности к определенному каналу, информацию о времени задержки, а также синхросигналы. Синхросигналы водятся в выходной регистр.
7. Система приоритета в Управляющей Логике включается при переполнении БЗУ. При этом в первую очередь ухудшается качество передачи данных с низшим приоритетом (увеличивают ![]() ). Если БЗУ очищается, то уменьшают
). Если БЗУ очищается, то уменьшают ![]() в первую очередь наиболее важных каналов. Изменение характеристик устройства сжатия осуществляется как автоматически, так и по командам с земли.
в первую очередь наиболее важных каналов. Изменение характеристик устройства сжатия осуществляется как автоматически, так и по командам с земли.
8. Командная логика управляет вводом для каждого канала начальных пределов допусков, знаков приоритета и распределением информации в справочном ЗУ по командам с земли и по программе.
Классификация БССО приведена на рисунке 8.

Рисунок 8
Узкоспециализированные БССО предназначены для выполнения небольшого числа функций:
1. Сбора и регистрации данных.
2. Подготовки данных для передачи по каналам связи.
3. Вывод на индикацию.
Специализированные БССО выполняют следующие функции:
1. Изменение программы сбора данных.
2. Анализ и отображение наиболее существенной части измерительной информации.
3. Определение состояния технических систем.
4. Сжатие и передача данных.
Универсальные БССО решают задачи обработки данных с одновременным управлением штатного оборудования ЛА. Строятся на базе мультипроцессорной техники.
В соответствии с возможностью адаптации к изменениям условий функционирования (характеристик потоков измерительной информации) БССО делят на два класса: неадаптивных и адаптивных.
Неадаптивные системы изменяют свои характеристики по сигналам с пункта управления.
Адаптивные - самостоятельно изменяют свои характеристики. Это необходимо, когда законы распределения потоков входной информации неизвестны.
расходомер топливо цифровой телеметрический
4.1 Узкоспециализированные БССО
Функции таких БССО несложны, поэтому можно обойтись без использования ЭВМ. Для таких систем характерен жесткий алгоритм функционирования этапов: 1-сбора, 2-регистрации, 3-подготовки для передачи, 4-индикации.
Первая система разработана французской фирмой S FIM в начале 50-х годов. В США в 1952г. принят закон о использовании таких систем (черных ящиков) на всех самолетах гражданской авиации. Обязательно регистрируются на магнитную ленту четыре параметра, характеризующих трассу полета: 1-скорость, 2-высота, 3-вертикальное ускорение, 4-курс.
В настоящее время число регистрируемых параметров ЛА более 20-30. в качестве регистраторов используются магнитофоны и ЭВМ.
Примером подобной системы есть БССО самолета (Дуглас) ДС-10, которая используется с 1970г (рисунок 9), где 1 – управление скоростью регистрации, 2 – метки времени, 3 – цифровые данные.
Все датчики разбиты на две группы высокого и низкого уровня. Подсистема нормировки состоит из двух блоков, каждый принимает 160 аналоговых сигналов.
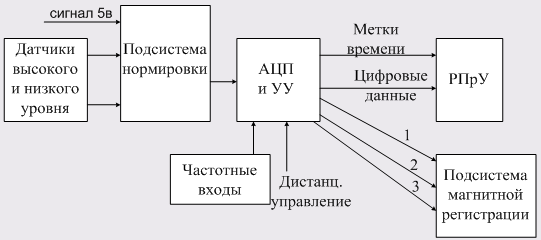
Рисунок 9
Производится нормировка к уровню ![]() 5в. АЦП осуществляет опрос 320 нормированных каналов, а также 10 ЧМ сигналов о ВЧ вибрациях.
5в. АЦП осуществляет опрос 320 нормированных каналов, а также 10 ЧМ сигналов о ВЧ вибрациях.
Подсистема регистрации производит запись последовательным ИКМ кодом данных на магнитную ленту. Максимальная скорость регистрации 5000 бит/с при плотности записи на магнитный носитель 330 бит/мм.
Дистанционное управление используется для изменения режимов работы и скорости регистрации. Аналогичные системы использовались в американских спутниках в 1970 годах.
4.2 Специализированные БССО
В состав специализированных БССО вводится БЦВМ. Задачи БЦВМ :
1. Техническая диагностика неисправностей.
2. Адаптивный опрос и сжатие измеряемой информации.
3. Определение спектральных характеристик.
4. Определение статистических характеристик.
5. Рациональное кодирование.
6. Определение летно – технических характеристик.
Применяются с 1963г. вместе с возникновением ЭВМ третьего поколения (на интегральных схемах). Впервые специализированные БССО использовались в военной авиации для решения сложных баллистических задач, связанных с применением ракет.
Фирма IBM впервые установила специализированные БССО с параметрами 500 тыс. операций в секунду и объемом памяти 32000 26-ти разрядных слов на космическом аппарате. Mariner – 4.
Примером специализированных БССО является система, установленная на самолете С-5А. Эта система может работать на ракетах и КЛА (рисунок 10).
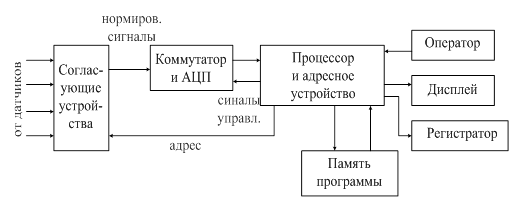
Рисунок 10
Данные от 20 блоков, включающие ![]() 1000 датчиков подаются на СУ. Сигналы нормируются по амплитуде и через коммутатор, а также АЦП проходят в БЭВМ, где кодируются, анализируются на наличие отказов и обрабатываются. Результаты анализа выводятся на дисплей и на панель управления и индикации. При нормальном полете используется одна частота опроса, при возникновении дефекта для детального анализа частота может регулироваться сигналом управления. Кроме того может регулироваться и порядок опроса (команда "адрес"). На экране дисплея можно вызвать сигналы любой подсистемы и сравнить с эталонами. Программа работа задана жестко и не обладает адаптивностью.
1000 датчиков подаются на СУ. Сигналы нормируются по амплитуде и через коммутатор, а также АЦП проходят в БЭВМ, где кодируются, анализируются на наличие отказов и обрабатываются. Результаты анализа выводятся на дисплей и на панель управления и индикации. При нормальном полете используется одна частота опроса, при возникновении дефекта для детального анализа частота может регулироваться сигналом управления. Кроме того может регулироваться и порядок опроса (команда "адрес"). На экране дисплея можно вызвать сигналы любой подсистемы и сравнить с эталонами. Программа работа задана жестко и не обладает адаптивностью.
4.3 Универсальные БССО
Появление универсальных БССО связано с тем, что:
1. Допустимое время для принятия решения уменьшается.
2. Стоимость расхода горючего увеличивается.
3. Любая ошибка дорого обходится.
Т.е. время на обработку и управление КЛА и ЛА резко сократилось. БЭВМ, установленные на универсальных БССО, решают задачи:
- диагностики;
- регистрации и обработки данных;
- управление режимом работы.
Для этой цели разработаны мультипроцессорные многофункциональные системы магистрального типа.
Во всех разработанных для КЛА универсальных БССО используется магистрально – модульный принцип построения (рисунок 11).
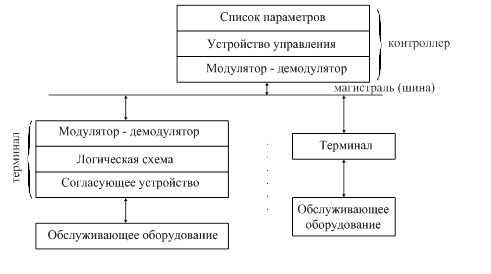
Рисунок 11
Терминал включает модем, логическое устройство, согласующее устройство. В модеме осуществляется модуляция и демодуляция сигналов. Логическое устройство производит предварительный анализ информации, а согласующее устройство – нормировку по амплитуде.
По сигналам программного устройства в соответствии со списком параметров производится обмен информацией между терминами и контроллером. Каждый терминал имеет свой адрес. Контроллер осуществляет обработку информации, поступившей от терминала, и задает порядок функционирования обслуживаемого оборудования. Формат данных, передаваемых между контроллером и терминалом изображен на рисунке 12.
От контроллера

Рисунок 12
Глава 5. Адресные РТМС
К числу недостатков многоканальных систем с ВРК следует отнести:
- высокие требования к синхронизации;
- возможность только поочередной и циклической передачи канальных сигналов.
Принцип адресного разделения каналов заключается в том, что элемент сигнала каждого канала наделяется дополнительным признаком, характерным только для этого канала (рисунок 1), где А, И – адресная и информационная части канала.

Рисунок 1
Наличие адреса позволяет:
- избавиться от обязательной очередности передачи данных в порядке номеров каналов;
- использовать принцип приоритета при передаче более важной информации;
- использовать систему синхронизации.
Передача многоканального сообщения при адресном разделении каналов может быть последовательной и параллельной во времени. Адресный метод позволяет создавать адаптивные РТМС. Практически используются адресные РТМС с ВРК. Недостатки адресных РТМС:
1. По сравнению с цифровыми РТМС адресные РТМС имеют меньшее число каналов за счет введения дополнительной адресной информации.
2. Несмотря на упрощение системы синхронизации, структура адресных РТМС сложнее структуры РТМС с ВРК. Это объясняется введением ряда дополнительных устройств в адресные РТМС.
Адресные телеметрические системы могут быть аналоговыми и цифровыми. В аналоговых системах канальный сигнал состоит из адресной и информационной части или же только из адресной части, параметры которого меняются в соответствии с изменением сигнала датчика (рисунок 2).
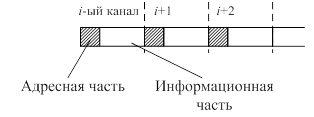
Рисунок 2
Упрощенные блок-схемы передающих частей адресных РТМС приведены на рисунках 3 и 4.
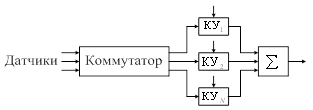
Рисунок 3
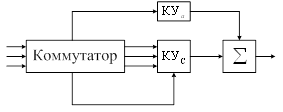
Рисунок 4
На первом рисунке для каждого канала имеется отдельное кодирующее устройство (КУ), которое вырабатывает как адресную, так и информационную часть кода. На втором рисунке для всех каналов имеются общие кодирующие устройства сигналов (КУс) и адресов (КУа).
В цифровых адресных РТМС как адрес, так и информационная часть канального сигнала представляется в кодовой форме.
В адресных РТМС всегда вводится дополнительная адресная информация, т.к. поток отсчетов на выходе устройства сокращения избыточности является в общем случае неравномерным. Роль преобразователя неравномерного потока в равномерный с постоянными интервалами между отсчетами обычно выполняет буферное запоминающее устройство (БЗУ).
В БЗУ часть отсчетов на какое-то время задерживается, при этом величина задержки меняется от отсчета к отсчету.
Изменение цикличности выдачи отсчетов требует введения дополнительной служебной информации о времени измерения и принадлежности отсчета (адреса). Каждый отсчет адаптивной системы состоит из трех частей (рисунок 5):
- кодовой группы адреса ![]() ;
;
- кодовой группы времени ![]() ;
;
- кодовой группы, несущей информацию о значении данного параметра![]() .
.
![]()
Рисунок 5
Заключение
Радиосвязь - одно из самых простых и надежных средств связи. Рации полезны и удобны, их можно использовать там, где недоступен ни один другой вид связи, системы радиосвязи недороги по цене, легко развертываются и нетребовательны к условиям окружающей.
Наиболее характерными для современных РСПИ являются три формы представления сообщений, которые формируются на борту и передаются по линиям связи:
1. Сообщения о наличии/отсутствии некоторого априорно известного сообщения (включения/выключения двигателей, удары метеорита).
2. Сообщения о величинах характеризуют значения параметров в определенный момент времени.
3. Сообщения о процессах должны с заданной точностью воспроизводить процессы на определенном отрезке времени, т.е. в этом случае также необходимо производить калибровку амплитуды и масштабирование по времени.
Список литературы
1. Радиотехнические методы передачи информации: Учебное пособие для вузов / В.А.Борисов, В.В.Калмыков, Я.М.Ковальчук и др.; Под ред. В.В.Калмыкова. М.: Радио и связь. 1990. 304с.
2. Системы радиосвязи: Учебник для вузов / Н.И.Калашников, Э.И.Крупицкий, И.Л.Дороднов, В.И.Носов; Под ред. Н.И.Калашникова. М.: Радио и связь. 1988. 352с.
3. Тепляков И.М., Рощин Б.В., Фомин А.И., Вейцель В.А. Радиосистемы передачи информации: Учебное пособие для вузов / М.: Радио и связь. 1982. 264с.
4. Кириллов С.Н., Стукалов Д.Н. Цифровые системы обработки речевых сигналов. Учебное пособие. Рязань. РГРТА, 1995. 80с.