Радиолокация как научно-техническое направление в радиотехнике
1. Измеряемые координаты
2. История исследования и разработки радиолокационных устройств
3. Радиолокационное обнаружение
4. Импульсная радиолокация
5. Измерение угловых координат цели
6. Измерение дальности в импульсной радиолокации
7. РЛС обнаружения и РЛС слежения
8. Как можно измерять дальность при непрерывном излучении
Заключение
Список литературы
Введение
Радиолокацией называется совокупность методов и технических средств, предназначенных для обнаружения различных объектов в пространстве, измерения их координат и параметров движения посредством приема и анализа электромагнитных волн, излучаемых или переизлучаемых объектами.
Радиолокация как научно-техническое направление в радиотехнике зародилась в 30-х годах. Достижения авиационной техники обусловили необходимость разработки новых средств обнаружения самолетов, обладающих высокими характеристиками (дальностью, точностью). Такими средствами оказались радиолокационные системы.
Выдающийся вклад в развитие радиолокации внесли советские ученые и инженеры П.К. Ощепков, М.М. Лобанов, Ю.К. Коровин, Б.К. Шембель. В Советском Союзе первые успешные эксперименты обнаружения самолетов с помощью радиолокационных устройств были проведены еще в 1934/36 гг. В 1939 г. на вооружении войск ПВО поступили первые серийные отечественные радиолокаторы. Существенным шагом в развитии радиолокации было создание в 1940/41 гг. под руководством Ю.Б. Кобзарева импульсного радиолокатора. В настоящее время радиолокация одна из наиболее прогрессирующих областей радиотехники.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС) или радиолокаторами; а наблюдаемые объекты — радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения и т. п.
В радиолокации наиболее часто измеряются дальность между целью и РЛС, угловые координаты (азимут, угол места) и радиальная, относительно радиолокатора, составляющая скорости движения. (Азимут - это угол между направлением на цель и северным направлением, измеренный в горизонтальной плоскости. Угол места измеряется между вектором наклонной дальности и его проекцией на горизонтальную плоскость.) В задачу радиолокационного наблюдения в некоторых случаях входит также идентификация (распознавание) целей.
Системы радиолокации практически всегда входит в состав более сложных суперсистем. Эти суперсистемы имеют важное военное и народнохозяйственное значение и находят разнообразное применение: для управления воздушным движением, в навигации самолетов, кораблей, в геофизических и астрофизических исследованиях и др.
Системы радиолокации составляют информационную часть таких суперсистем и функционируют совместно и во взаимной связи с другими подсистемами суперсистемы (радионавигации, радиоуправления, передачи информации).
1. Измеряемые координаты
Радиолокация обеспечивает определение координат объекта по отраженному от него радиосигналу. Координаты определяются относительно места расположения радиолокатора, и основными являются две угловых координаты: азимут и угол места, и наклонная дальность. Их определение поясняется следующим рисунком.
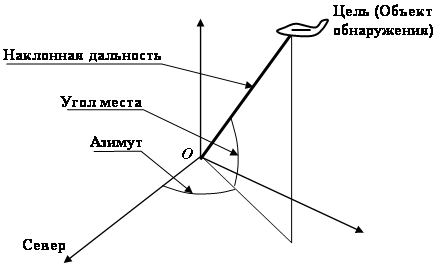
Радиолокатор располагается в точке О. Азимут измеряется в горизонтальной плоскости. Это угол между направлением на север и вертикальной плоскостью, проходящей через радиолокатор и цель. Угол места – это угол между касательной к земной поверхности и направлением на объект в вертикальной плоскости.
Уже в первом договоре на разработку радиолокационной аппаратуры, заключенном Управлением противовоздушной обороны Рабоче-крестьянской Красной Армии (УПВО РККА) и Ленинградским электрофизическим институтом (ЛЭФИ) в феврале 1934 г., были сформулированы следующие тактико-технические требования:
· Обнаружение самолетов и определение координат на высотах полета до 10 км и расстоянии до 50 км;
· Точность определения координат в пределах 2 – 5%;
· Определение количества самолетов (один, два, звено, эскадрилья и больше;
· Определение скорости самолета с точностью до 25 км/ч и курса с точностью 2 – 5%.
Ясно, что эти требования были скорее желаемыми, чем реально достижимыми, так как в то время сама возможность обнаружения самолетов по отраженному от них электромагнитному излучению была сомнительной, и выполнение одного единственного требования – обнаружение самолета на расстоянии 50 км было бы большим достижением.
Договор Главного артиллерийского управления (ГАУ) с ЛЭФИ (январь 1934 г.) предусматривал решение более скромной задачи: обнаружение самолета и его пеленгация с точностью, достаточной для управления зенитным прожектором.
2. История исследования и разработки радиолокационных устройств
Не преуменьшая роли всех исследователей и разработчиков радиолокационных устройств, отдадим должное двум людям, благодаря усилиям которых СССР к началу Великой Отечественной войны обладала радиолокационными станциями обнаружения достаточно высокого качества. Это Павел Кондратьевич Ощепков и Юрий Борисович Кобзарев.
Это были целеустремленные люди, что проявилось еще в годы их учебы. Ощепков за время обучения на первом курсе вуза выполнил программу двух курсов и был сразу переведен на третий. Кобзарев не учился в десятом классе школы, так как все экзамены за среднюю школу сдал после девятого класса. ВУЗ он закончил за четыре года вместо положенных пяти.
Идея обнаружения самолетов с помощью радиоволн для противовоздушной обороны возникла у инженера П.К. Ощепкова, когда он проходил одногодичную военную службу в артиллерийском полку ПВО в 1932 г. Он поделился своими мыслями с командиром полка В.М. Черновым, а тот, в свою очередь, с приехавшим в полк инспектором Управления ПВО И.Ф. Блажевичем. Увидев в инженере Ощепкове инициативного, изобретательного человека, командование УПВО, крайне заинтересованное в решении задачи надежного обнаружения самолетов, отозвало П.К. Ощепкова из артиллерийского полка, и он был назначен инженером в УПВО.
Так с конца 1932 г. П.К. Ощепков стал работать в центральном аппарате Наркомата обороны над вопросами радиообнаружения самолетов для службы ВНОС (воздушное наблюдение, обнаружение, связь) ПВО.
Во второй половине 1933г. П.К. Ощепков в докладе Народному комиссару обороны К.Е. Ворошилову изложил принцип использования в системе ПВО новых средств обнаружения самолетов с применением радиоволн. Работая над этой проблемой, он пришел к выводу о целесообразности применения импульсного, а не непрерывного излучения радиоволн, что и определило его дальнейшие усилия по разработке именно импульсных радиолокаторов.
К.Е. Ворошилов и М.Н. Тухачевский одобрительно отнеслись к инициативе УПВО и рекомендовали привлечь к обсуждению этого вопроса ученых Академии Наук СССР. Ощепков как представитель УПВО встретился с Президентом АН СССР А.П. Карпинским и по его совету с академиками А.Н. Крыловым, С.И. Вавиловым и А.Ф. Иоффе. В результате в Ленинградском физико-техническом институте (ЛФТИ) под председательством А.Ф. Иоффе было созвано совещание ведущих специалистов в области радиотехники, на котором с докладом выступил П.К. Ощепков. (Поразительна смелость этого молодого человека!). Единого мнения у присутствующих не было. В Постановлении было отмечено, что использование радиосредств может привести к созданию нужных приборов, но ввиду новизны проблемы необходима длительная научно-исследовательская работа, и пока следует продолжать работы по звукопеленгации и инфракрасной локации (по тепловому излучению работающих двигателей). Сомнения вызывала возможность обнаружения сигнала, отраженного от самолета, ввиду его малости. Только один человек согласился на проведение работ по радиолокации. Это был директор ЛЭФИ академик А.А. Чернышев, который за пять дней до этого совещания (!!!) заключил договор с Главным Артиллерийским управлением (ГАУ) на разработку станции радиообнаружения. Он знал об экспериментальных исследованиях по радиообнаружению самолетов, выполненных в 1933 г в Центральной радиолаборатории (ЦРЛ) под руководством инженера Ю.К. Коровина.
В ЛЭФИ было выбрано непрерывное излучение для построения аппаратуры радиообнаружения, а П.К. Ощепков оставался сторонником импульсного излучения. Поэтому работа УПВО с ЛЭФИ не была продолжена, и в начале 1935 г был заключен договор УПВО с ЛФТИ. Выполнение его было возложено на лабораторию проф. Д.А. Рожанского.
Д.А. Рожанский был видным специалистом по распространению радиоволн. В 1925 г. он приехал в Харьков, чтобы создать пункт для изучения распространения коротких волн. И надо же было там произойти одной случайной встрече. Ему в качестве помощника порекомендовали студента четвертого курса Харьковского института народного образования Ю. Кобзарева. Увлеченность и самоотдача этого студента так понравились Рожанскому, что он пригласил Кобзарева к себе на работу. Кобзарев досрочно заканчивает институт и двадцати лет от роду в феврале 1926 г. начинает работу в ЛФТИ в должности научного сотрудника в лаборатории Рожанского.
В марте 1935 г. лаборатория приступила к исследованию импульсного метода радиолокации и разработке узлов будущего радиолокатора, в первую очередь, генератора высокочастотных импульсов, усилителя широкополосных сигналов и индикатора, который бы позволял измерять координаты цели. После смерти Рожанского разработкой импульсной РЛС стал руководить Кобзарев. Эта работа дала начало созданию отечественной РЛС дальнего обнаружения РУС-2. За разработку импульсной РЛС Ю.Б. Кобзарев стал лауреатом Сталинской премии.
В первых РУС-2 использовались отдельные приемная и передающая антенны. Станция располагалась на двух автомашинах – соответственно, для приемника и передатчика. Антенны жестко закреплялись на кабинах. Обзор пространства обеспечивался синхронным вращением кабин. Было произведено 12 таких станций. А далее стали выпускаться станции РУС-2с, в которых использовалась одна антенна на прием и передачу. Обзор пространства производился вращением антенны, а кабина была неподвижной.
США и Англия к началу Второй мировой войны уже обладали развитым парком радиолокационных станций: наземных, корабельных, самолетных. Наиболее удачной наземной РЛС обнаружения была станция SCR 268, разработанная в США. В этой РЛС использовались три отдельные антенны для передатчика, приемника азимутального канала и приемника угломестного канала, размещенных на одной станине.
3. Радиолокационное обнаружение
В любую радиолокационную систему входят три обязательных узла: передатчик, приемник и индикаторное устройство.
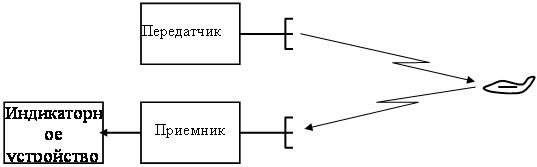
Передатчик формирует высокочастотное колебание, которое через передающую антенну излучается в пространство. Если на пути излученной электромагнитной волны окажется какой-либо объект (цель), то электромагнитная волна будет рассеиваться (отражаться) им по всем направлениям. Малая часть этой рассеянной волны попадет на приемную антенну и преобразуется приемником в электрический сигнал. В этом сигнале содержится информация об отражающем объекте. Задача индикатора – представить эту информацию в удобной форме.
Работа по радиообнаружению целей началась в начале 30-х годов практически одновременно в странах с развитой радиопромышленностью – США, СССР, Германии, Англии, Франции и Японии. Первые системы радиообнаружения использовали непрерывное излучение электромагнитного колебания. Во многом это определялось требованиями технической реализации. Все, что нужно для непрерывной системы радиообнаружения, уже было разработано для систем радиосвязи: передатчики непрерывных колебаний, высокочувствительные сверхрегенеративные приемники, стрелочные и звуковые индикаторы. А импульсные передатчики, так же как и усилители радиоимпульсов, требовалось еще разрабатывать.
Принцип построения системы напрашивался сам собой: использование интерференции прямого сигнала, излученного передатчиком, и сигнала, отраженного от цели.
 |  | ||||||||||||
| |||||||||||||