Динамические системы в плоской области
ТЕМА
ДИНАМИЧЕСКИЕ СИСТЕМЫ В ПЛОСКОЙ ОБЛАСТИ
1. Введение
Мы будем рассматривать системы дифференциальных уравнений вида
![]() (I)
(I)
где Р (х, у) и Q (х, у) — непрерывные функции, определенные в некоторой области G евклидовой плоскости (х, у — декартовы координаты) и имеющие в этой области непрерывные частные производные до порядка не ниже первого. Область может быть как ограниченной, так и неограниченной. В частности, область G может совпадать со всей плоскостью (х, у).
Системы вида (I) являются частным случаем систем двух дифференциальных уравнений с двумя неизвестными функциями: независимое переменное t в их правые части явно не входит. Системы дифференциальных уравнений, правые части которых не содержат явно независимое переменное, называются автономными. Автономные системы дифференциальных уравнений называются также динамическими системами.
Систему (I) мы будем называть динамической системой на плоскости или в плоской области. Мы будем также говорить, что динамическая система задана или определена в области G. В дальнейшем мы будем опускать слова «на плоскости» и «в плоской области».
Динамическая система (I), заданная в области G, называется системой класса Сn, если функции Р (х, у) и Q (я, у) являются функциями класса Сn, т. е. имеют в области G непрерывные частные производные до порядка n включительно.
Динамическая система (I) называется системой аналитического класса или аналитической системой, если функции Р и Q являются аналитическими функциями в области G.
Очевидно, всякая система класса Ck (к > 1) является одновременно системой класса Ck1, где к1 < к, в частности, системой класса C1. Аналитическая система является системой класса Ck для любого натурального к.
Все рассматриваемые в этой книге динамические системы являются системами класса ![]() . Поэтому всюду в дальнейшем под динамической системой мы будем во всяком случае всегда подразумевать систему класса
. Поэтому всюду в дальнейшем под динамической системой мы будем во всяком случае всегда подразумевать систему класса ![]() , не оговаривая этого явно.
, не оговаривая этого явно.
Изложим простейшие свойства динамических систем в плоской области. Свойства эти характерны для автономных систем дифференциальных уравнений. Неавтономные системы (т. е. системы, в правые части которых t входит явно), вообще говоря, ими не обладают .
2. Геометрическая интерпретация динамической системы (I) в пространстве -R3
Рассмотрим обычную для системы двух дифференциальных уравнений с двумя неизвестными функциями геометрическую интерпретацию, т. е. геометрическую интерпретацию в трехмерном пространстве с декартовыми координатами х, у, t.
Функции Р (х, у) и Q (х, у) нужно при этом рассматривать как функции трех переменных х, у и t. Но так как эти функции от t не зависят, то в трехмерном пространстве R3 областью определения правых частей системы (I) является бесконечная цилиндрическая область Н, образованная всеми прямыми, параллельными оси t, пересекающими плоскость (х, у) в точках области G .
Решения
![]()
системы (I) интерпретируются как кривые, расположенные в области Н. Эти кривые называются интегральными кривыми системы (I). Мы будем, здесь и всюду в дальнейшем, под решением системы дифференциальных уравнений подразумевать решение, продолженное на максимальный возможный интервал значений t.
Так как функции Р (х, у) и Q (х, у) во всяком случае являются функциями класса С1 то для системы (I) во всех точках области H выполняются условия теоремы существования и единственности, а следовательно и сама эта теорема. Мы сформулируем ее для системы (I) следующим образом:
Теорема 1. Для любой точки М0(х0,![]() )
)![]() G и для любого t0,
G и для любого t0, ![]() , существует одно и только одно решение
, существует одно и только одно решение
![]()
системы (I), удовлетворяющее начальным условиям
![]()
определенное для всех значений t в некотором определенном интервале (![]() , Т), содержащем t0.(В частности, решение может быть определено при всех значениях t, т. е. t может быть равно
, Т), содержащем t0.(В частности, решение может быть определено при всех значениях t, т. е. t может быть равно ![]() , а Т может быть равно
, а Т может быть равно ![]() ).
).
Геометрически теорема 1 означает, что через каждую точку области Н проходит интегральная кривая системы (I) и при этом только одна.
Для системы вида (I) справедлива также следующая теорема, которая существенно используется в дальнейшем:
Теорема 2. Пусть ![]() — замкнутая ограниченная область, содержащаяся в области G (
— замкнутая ограниченная область, содержащаяся в области G (![]()
![]() G),
G),
![]() (1)
(1)
— решение системы (I), определенное в интервале (![]() , Т) и такое, что при всех t на интервале (
, Т) и такое, что при всех t на интервале (![]() , Т) точка N (
, Т) точка N (![]() ,
,![]() ) все время остается в области
) все время остается в области ![]() . Тогда
. Тогда ![]() =
=![]() , T=+
, T=+![]() , т.е.решение (1) определено для всех значений t.
, т.е.решение (1) определено для всех значений t.
Доказательство. Предположим, что решение
![]()
определено при значении t - t0. Пусть ![]() — два произвольных числа, причем
— два произвольных числа, причем ![]() < t0,
< t0, ![]() > t0. Обозначим через
> t0. Обозначим через ![]() конечную цилиндрическую область пространства
конечную цилиндрическую область пространства ![]() , состоящую из всех точек М (t, x, у) таких, что
, состоящую из всех точек М (t, x, у) таких, что ![]() , а х, у таковы, что точка (х, у)
, а х, у таковы, что точка (х, у) ![]()
![]() (рис. 1). Интегральная кривая, соответствующая решению (1), проходит через точку М0 (t0,
(рис. 1). Интегральная кривая, соответствующая решению (1), проходит через точку М0 (t0,![]() ,
,![]() ), принадлежащую области H1. Но тогда, в силу теоремы (А') дополнения, эта интегральная кривая выходит из области
), принадлежащую области H1. Но тогда, в силу теоремы (А') дополнения, эта интегральная кривая выходит из области ![]() как при значении, большем t0, так и при значении, меньшем t0. Однако выйти из цилиндрической области
как при значении, большем t0, так и при значении, меньшем t0. Однако выйти из цилиндрической области ![]() через боковую поверхность этой области интегральная кривая не может, так как в этом случае, очевидно, нашлась бы точка N (
через боковую поверхность этой области интегральная кривая не может, так как в этом случае, очевидно, нашлась бы точка N (![]() ), лежащая вне замкнутой области
), лежащая вне замкнутой области ![]() , что противоречит условию теоремы.
, что противоречит условию теоремы.
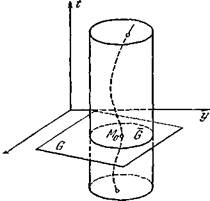
Рис. 1.
Следовательно, рассматриваемая интегральная кривая выходит из ![]() через нижнее и верхнее основания (рис. 1). Но это значит, что решение (1) определено при t =
через нижнее и верхнее основания (рис. 1). Но это значит, что решение (1) определено при t = ![]() и t =
и t =![]() . Так как
. Так как ![]() произвольны, то решение (1) определено при всех значениях t. Теорема доказана.
произвольны, то решение (1) определено при всех значениях t. Теорема доказана.
3. Простейшие свойства решений системы (I)
Мы установим некоторые cвойства решений системы (I), являющиеся следствием автономности этой системы.
Лемма 1. Если ![]()
есть решение системы (I), определенное на интервале (![]() , Т), то
, Т), то
![]() (2)
(2)
где С — любая постоянная, также есть решение системы (I) и это решение определено на интервале (![]() — С, Т — С).
— С, Т — С).
Доказательство. Так как (1) есть решение системы (I), то при всех t ![]() (
(![]() , Т) имеет место тождественное равенство
, Т) имеет место тождественное равенство
![]() (
(![]() ),
), ![]() .
.
Если заменить в этих равенствах t на t+C, то при всех t![]() (
(![]() —С,Т — С) мы будем иметь тождественное равенство
—С,Т — С) мы будем иметь тождественное равенство
![]()
![]() (3)
(3)
Но, очевидно
![]() ,
, ![]()
и, следовательно, равенства (3) могут быть записаны в виде
![]()
![]()
Последние равенства показывают, что функции (2) являются решением системы (I). Тот факт, что это решение определено на интервале (![]() — С, Т — С), устанавливается простым рассуждением, которое мы опускаем. Лемма доказана.
— С, Т — С), устанавливается простым рассуждением, которое мы опускаем. Лемма доказана.
С точки зрения геометрической интерпретации в трехмерном пространстве утверждение леммы 1 означает, что линия, получающаяся из любой интегральной кривой путем сдвига ее вдоль оси t на любой отрезок, также есть интегральная кривая. В самом деле, интегральная кривая
![]()
получается из интегральной кривой
![]()
сдвигом вдоль оси t на величину С.
Лемма 2.
а) Решения системы (I)
![]() (1)
(1)
и ![]() (2)
(2)
можно рассматривать как решения, удовлетворяющие начальным условиям с одинаковыми начальными значениями х0 и у0 и различными начальными значениями переменного t.
б) Два решения, удовлетворяющие начальным условиям с одинаковыми начальными значениями переменных х0, у0 и различными начальными значениями t,могут быть получены одно из другого заменой t на ![]() с надлежащим выбором постоянной С.
с надлежащим выбором постоянной С.
Доказательство. Если решение (1) соответствует начальным значениям t0, x0, у0 так, что
![]() (3)
(3)
то в силу очевидных равенств
![]() (t0—С + С) =
(t0—С + С) = ![]() (t0) = x0 ψ (t0—С + С) = ψ (t0) = y0
(t0) = x0 ψ (t0—С + С) = ψ (t0) = y0
решение (2) соответствует начальным значениям t0—С, х0, у0, что и доказывает утверждение а).
Далее, рассмотрим наряду с решением (1), соответствующим начальным значениям t0, x0, у0, решение
![]() (4)
(4)
соответствующее начальным значениям ![]() , x0, у0, где
, x0, у0, где ![]() t0. Если в решении
t0. Если в решении
(2) ![]()
величину С взять равной t0—![]() , то оно, очевидно, будет соответствовать тем же начальным значениям
, то оно, очевидно, будет соответствовать тем же начальным значениям ![]() , x0, у0, что и решение (4). В силу единственности решения, удовлетворяющего данным начальным условиям, отсюда следует
, x0, у0, что и решение (4). В силу единственности решения, удовлетворяющего данным начальным условиям, отсюда следует
![]() ,
, ![]()
что и доказывает утверждение б) леммы.
В дальнейшем, рассматривая наряду с решением (1) решение (2), мы будем часто говорить, что рассматриваются решения, отличающиеся выбором начального значения t. Решение всякой системы двух дифференциальных уравнении, соответствующее любым произвольным начальным значениям t0, х0, у0 , очевидно, является функцией t, t0, х0, у0 , т. е. записывается в виде
х = Ф(t, t0, х0, г/о), y= Ψ (t, t0, х0, у0) (5)
При этом по самому смыслу функций Ф (t, t0, х0, у0) и Ψ (t, t0, x0, у0), Ф(t0, t0, х0, у0) = х0, Ψ (t0, t0, х0, у0)= у0
Однако в случае системы (1), вследствие автономности этой системы, функции (5) являются по существу не функциями переменных t и t0, а функциями разности t—t0. Это устанавливается в следующей лемме:
Лемма 3. Решение системы (I) как функции от t и от начальных значений t0 , x0 , у0 ,может быть записано в виде
x = ![]() (t—t0 , х0 , у0), y = ψ(t —t0, х0, у0). (6)
(t—t0 , х0 , у0), y = ψ(t —t0, х0, у0). (6)
Доказательство. Рассмотрим наряду с решением (5) решение
х = Ф(t, 0, х0, у0), y =Ψ (t, 0, х0, у0),
удовлетворяющие начальным условиям: при t=0, х=х0, у=у0
В силу леммы 1 функции
x = Ф (t — t0, 0, х0, у0), y =Ψ (t— t0 ,0, х0 ,у0) (7)
также являются решением системы (I). Решения (5) и (7) соответствуют одним и тем же начальным значениям t0, x0, у0 . Но тогда эти решения совпадают, т. е.
Ф (t ,t0 , х0, у0)= Ф (t — t0, 0, х0, у0)
Ψ (t , t0, х0 ,у0)= Ψ (t— t0 ,0, х0 ,у0)
Введение обозначений
Ф (t — t0, 0, х0, у0)=![]() (t—t0 , х0 , у0),
(t—t0 , х0 , у0),
Ψ (t— t0 ,0, х0 ,у0)= ψ(t —t0, х0, у0)
устанавливает справедливость утверждения леммы.
В дальнейшем решение системы (I), соответствующее начальным значениям t0, х0, у0, мы всегда будем записывать в виде (6).
Лемма 4. Если решение
x = ![]() (t—t0 , х0 , у0), y = ψ(t —t0, х0, у0). (8)
(t—t0 , х0 , у0), y = ψ(t —t0, х0, у0). (8)
определено при значении t = t1 , и
 (9) то
(9) то
![]() (t—t0 , х0 , у0)
(t—t0 , х0 , у0) ![]() (t —t1, х0, у0)
(t —t1, х0, у0)
ψ(t—t0 , х0 , у0) ![]() (t —t1, х0, у0) (10)
(t —t1, х0, у0) (10)
Доказательство. Из соотношений (9), очевидно, следует, что решение (8) и решение
x =![]() (t —t1, х0, у0), y=
(t —t1, х0, у0), y= ![]() (t —t1, х0, у0)
(t —t1, х0, у0)
являются решениями, соответствующими одним и тем же начальным значениям t1 , х1 , y1. Но тогда эти решения совпадают, т. е. имеют место равенства (10).
Замечание. Полагая в тождествах (10) t = t0, мы получим
x0 = ![]() (t0
(t0![]() t1 , х1 , у1) , y0 = ψ(t0
t1 , х1 , у1) , y0 = ψ(t0![]() t1 , х1 , у1)
t1 , х1 , у1)
Это, очевидно, справедливо при любых t1 , х1 , у1 удовлетворяющих соотношениям (10). Опуская индексы, мы получаем
x0 =![]() (t0—t, х, у) , y0 = ψ(t0—t, х, у).
(t0—t, х, у) , y0 = ψ(t0—t, х, у).
Лемма 5. Если система (I) является системой класса Сn , тo функции
x0 =![]() (t—t0 , х0 , у0) , y0 = ψ (t—t0 , х0 , у0)
(t—t0 , х0 , у0) , y0 = ψ (t—t0 , х0 , у0)
при всех значениях, входящих в них переменных, при которых эти функции определены, имеют непрерывные (по совокупности всех переменных) частные производные:
1) по t (или t0) до порядка n+1 включительно,
2) по х0 и у0 до порядка n включительно
3). пo t (или t0) и по х0 и у0—содержащие по крайней мере одно дифференцирование по t (или t0)—до порядка n + 1
4. Геометрическая интерпретация динамической системы на фазовой плоскости (х, у)
Геометрическая интерпретация системы (I) в трехмерном пространстве (х, у, t) в настоящей книге является вспомогательной. Основная геометрическая интерпретация автономной системы (1)связана с рассмотрением плоскости (х, у). Эта плоскость называется фазовой плоскостью системы (I).
Будем в каждой точке М (х, у) области G плоскости (х, у) рассматривать вектор v с компонентами Р (х, у), Q (x, у). Динамическая система (I) определяет, таким образом, в области G векторное поле *).
В силу того, что Р (х, у) и Q (х, у) по предположению имеют непрерывные частные производные, векторное поле, определяемое системой (I), является так называемым непрерывно дифференцируемым векторным полем.
Пусть в точке М (х, у) хотя бы одна из величин Р (х, у), Q (х, у) не обращается в нуль. Тогда длина вектора в этой точке
![]()
отлична от нуля, а синус и косинус угла ![]() (x, у) между положительным направлением оси х и направлением вектора даются выражениями
(x, у) между положительным направлением оси х и направлением вектора даются выражениями
![]()
В тех точках, в которых одновременно Р (х, у), Q (x, у).
длина вектора обращается в нуль, а направление вектора становится неопределенным. Такие точки называются особыми точками векторного поля (или особыми точками системы (1)); точки, в которых хотя бы одна из величин Р (x, у), Q (х, у) не равна нулю,— обыкновенными или неособыми точками этого векторного поля. Во всякой неособой точке М векторного поля угол ![]() (x, у), непрерывен. В особой точке угол
(x, у), непрерывен. В особой точке угол ![]() (x, у) неопределен, и при стремлении
(x, у) неопределен, и при стремлении ![]() и
и ![]() к координатам особой точки lim
к координатам особой точки lim![]() может не существовать.
может не существовать.
Пусть
![]() (11)
(11)
— какое-нибудь решение системы (I). Множество точек М (![]() (t), ψ (t)), где t принимает все значения, при которых определено решение (11), называется траекторией, соответствующей данному решению, а также траекторией векторного поля, заданного динамической системой (І), или просто траекторией данной динамической системы (а также иногда фазовой траекторией).
(t), ψ (t)), где t принимает все значения, при которых определено решение (11), называется траекторией, соответствующей данному решению, а также траекторией векторного поля, заданного динамической системой (І), или просто траекторией данной динамической системы (а также иногда фазовой траекторией).
Уравнения (11), очевидно, являются параметрическими уравнениями траектории. Обратно, если дана какая-нибудь траектория, то решение, которому она соответствует, мы будем называть решением, соответствующим данной траектории.
В математической литературе весьма употребительно векторное обозначение для системы дифференциальных уравнений. Система (I) в этом обозначении запишется в виде векторного уравнения
![]() = F(x)
= F(x)
Векторное обозначение чрезвычайно удобно при рассмотрении систем, состоящих из большого числа уравнении. Однако в рассмотренном нами случае системы только двух дифференциальных уравнении в этом обозначении нет особой необходимости, п мы не будем пользоваться им для того, чтобы не загромождать изложение различными символиками.)
Если точка М (х, у) траектории не является особой точкой векторного поля, то вектор (Р (х, у), Q (х, у)) является касательным вектором к траектории (рис. 2). Действительно, в силу того, что
![]()
есть решение системы (I), имеют место тождества
![]() (12)
(12)
Но вектор с компонентами ![]() (t),
(t), ![]() (t), очевидно, является касательным вектором к траектории, и в силу равенств (12) он совпадает с вектором поля, заданного системой (I).
(t), очевидно, является касательным вектором к траектории, и в силу равенств (12) он совпадает с вектором поля, заданного системой (I).

Рассматривая параметр t как «время», можно дать следующую «кинематическую» интерпретацию системы (I): решение
![]()
можно рассматривать как закон движения точки по траектории на фазовой плоскости. В каждой точке фазовой плоскости вектор, заданный системой (I), т. е. вектор Р(х, у), Q (х, у), очевидно, равен скорости движущейся точки или «фазовой скорости». Решениям с одними и теми же начальными значениями х0 и у0 и различными начальными значениями t0 соответствуют движения, начинающиеся в одной и той же точке, но в различные начальные моменты «времени» (t0 и t*). Точка с координатами (![]() ) называется также «изображающей» или «представляющей» точкой.
) называется также «изображающей» или «представляющей» точкой.
Пусть М (a,b) — особая точка системы (I), так что
P(a,b)=Q(a,b) (13)
Тогда, очевидно, х = a, у = b есть решение системы (I), и, следовательно, особая точка векторного поля сама является отдельной траекторией. Такая траектория называется состоянием равновесия *). Очевидно, также обратно, если у системы (I) есть решение
х = а, y= b (14)
(а и b — некоторые постоянные), то точка a, b непременно является состоянием равновесия (особой точкой векторного поля), т. е. для нее выполняются равенства (13). Решение (14), очевидно, вследствие того, что t в него не входит, определено для всех t.
В дальнейшем для точек х, у области G, для которых Р (х, у) =0, Q (х, у) = 0, в основном будет использоваться термин «состояние равновесия» (а не особая точка).
Состояние равновесия М (а, Ь) системы (I) называется изолированным, если существует ![]() > 0 такое, что в
> 0 такое, что в ![]() -окрестности кроме М не лежит уже более ни одного состояния равновесия.
-окрестности кроме М не лежит уже более ни одного состояния равновесия.
5. Разбиение области в фазовой плоскости на траектории
Некоторые элементарные сведения о траекториях.
Лемма 6. Всяким двум решениям, отличающимся только выбором начального значения t0, соответствует одна и та же траектория.
В другой терминологии — «положением равновесия» или «точкой покоя».
Доказательство. В силу лемм 1 и 2 всякие два решения, отличающиеся выбором начальных значений t0 (но имеющие одни и те же Начальные значения ![]() ), могут быть получены одно из другого заменой t на t + С. Но если даны два решении
), могут быть получены одно из другого заменой t на t + С. Но если даны два решении
![]() (15)
(15)
![]() (16)
(16)
причем решение (15) определено на интервале (![]() , Т), а решение (16) — на интервале (
, Т), а решение (16) — на интервале (![]() — С, Т — С), то, очевидно, им соответствует одна и та же траектория (так как замена в (15) t через t +С является просто заменой обозначении переменного). Лемма доказана.
— С, Т — С), то, очевидно, им соответствует одна и та же траектория (так как замена в (15) t через t +С является просто заменой обозначении переменного). Лемма доказана.
Теорема 3. Через каждую точку области G проходит одна и только одна траектория динамической системы (1).
Доказательство. Пусть М0 (х0, у0) — произвольная точка области G.
Тогда в силу теоремы 1 (о существовании и единственности решения) при всяком t существует решение, соответствующее начальным значениям t0, x0, ![]()
![]()
Это, очевидно, и означает, что через точку х0, у0 проходит хотя бы одна траектория L.
Предположим теперь, что через одну и ту же точку М0 (х0, у0) области G проходят две различные траектории L и L*.
Пусть
![]()
— решение, соответствующее траектории L*. Это решение, очевидно, непременно должно быть таким, чтобы при некотором значении t = t* мы имели бы
![]()
но тогда в силу леммы 2 при надлежащем выборе С мы должны иметь
![]()
и, следовательно (см. лемму 6), траектории L и L* вопреки предположению не могут быть различны. Теорема доказана.
Замечание 1. Из проведенного в теореме рассуждения непосредственно вытекает, что всякие два различных решения, соответствующих одной и той же траектории, получаются друг из друга заменой t на t +С, т. е. отличаются друг от друга только выбором начального значения t0 (см. лемму 2).
Замечание 2. Пусть при каком-либо выборе решения, соответствующего траектории L, точке М0 этой траектории соответствует значение t0, а точке M1 — значение t0 +![]() . Тогда из замечания 1 следует, что если при некотором другом выборе решения, соответствующего траектории L, точке М0 соответствует значение t*, то значению t* +
. Тогда из замечания 1 следует, что если при некотором другом выборе решения, соответствующего траектории L, точке М0 соответствует значение t*, то значению t* +![]() соответствует точка
соответствует точка ![]() .
.
Замечание 3. Если траектория целиком лежит в ограниченной замкнутой области ![]() с G, то в силу теоремы 2 соответствующее ей решение определено при всех значениях
с G, то в силу теоремы 2 соответствующее ей решение определено при всех значениях
t (![]() < t <
< t <![]() )
)
В силу теоремы 3 динамическая система, заданная в области G, определяет некоторое семейство траекторий или, как мы будем говорить, некоторое разбиение области G на траектории.
Мы укажем здесь некоторые основные свойства траекторий. Выше мы уже останавливались на одном частном типе траекторий, именно, на состояниях равновесия.
Как мы видели, х = а, y=b тогда и только тогда является состоянием равновесия, когда выполняются условия Р(а, b) = Q(a, b) = 0.
Предположим теперь, что траектория L, соответствующая решению
![]()
не является состоянием равновесия. Во всех точках такой траектории, очевидно, выполняется неравенство
![]()
Действительно, если бы в какой-нибудь точке М*(х*, у*) траектории L, соответствующей значению t*, имело место равенство
![]()
т. е. одновременно
![]()
и это, очевидно, означало бы, что точка х*, у* является состоянием равновесия. Но состояние равновесия само является отдельной траекторией, и в силу теоремы 3 точка М* (х*, у*) не может принадлежать отличной от состояния равновесия траектории L.
Рассмотрим вопрос о том, могут ли быть у траектории, отличной от состояния равновесия, «самопересечения», т. е. возможно ли, чтобы существовали значения t1 и t2, t1![]() t2 такие, чтобы соответствующие им точки траектории совпадали.
t2 такие, чтобы соответствующие им точки траектории совпадали.
Ответ на этот вопрос дается следующей леммой:
Лемма 7. Пусть траектория L, соответствующая решению
![]() (
(![]() < t < T), (17)
< t < T), (17)
отлична от состояния равновесия, и пусть существуют значения t, t1 и t2 (![]() < t1 < t2 < T) такие, что
< t1 < t2 < T) такие, что
![]()
Тогда решение (17) определено при всех значениях
t (т. е. ![]() )
)
функции ![]() ,
, ![]() являются периодическими функциями t, а соответствующая траектория—простой гладкой замкнутой кривой.
являются периодическими функциями t, а соответствующая траектория—простой гладкой замкнутой кривой.
Доказательство. Пусть
![]() (18)
(18)
Рассмотрим наряду с решением (17) решение
![]() (19)
(19)
определенное на интервале
(![]() — С, Т — С)
— С, Т — С)
где С = t2 — t1 (см. лемму 1).
Из равенств (18) следует, что решения (17) и (19) удовлетворяют одним и тем же начальным условиям (при t = t1 , x = х0 , у =у0). Но тогда эти решения совпадают, а следовательно, совпадают интервалы значений t, на которых они определены. Но интервалы (![]() , Т) и (
, Т) и (![]() — С, Т — С) при С
— С, Т — С) при С![]() 0 могут совпадать лишь в том случае, когда
0 могут совпадать лишь в том случае, когда ![]() =-
=-![]() , Т =+
, Т =+![]() .
.
Таким образом, мы показали, что решения (17) и (19) определены для всех t (![]() < t <
< t < ![]() ). Далее, из совпадения решений (17) и (19) следует, что при всех t (—
). Далее, из совпадения решений (17) и (19) следует, что при всех t (—![]() < t <
< t < ![]() )
)
![]() (20)
(20)
где C = t2— t1 >0. Это, очевидно, означает, что функции ![]() (t) и
(t) и ![]() (t)— периодические функции с общим периодом 0 = t2 — t1. Пусть
(t)— периодические функции с общим периодом 0 = t2 — t1. Пусть
![]() ) (21)
) (21)
— наименьшее положительное число, при котором имеют место равенства
![]() (22)
(22)
Такое число непременно существует. Действительно, в противном случае можно было бы указать последовательность положительных чисел {![]() } таких, что
} таких, что
![]() и
и ![]()
Очевидно, тогда при любом n и любом целом |k|
![]()
или, зафиксировав какое-нибудь t0, можно написать
![]()
Таким образом, каждая из функции ![]() (t) и
(t) и ![]() (t) принимает одно и то же значение, равное соответственно
(t) принимает одно и то же значение, равное соответственно ![]() (
(![]() ) и
) и ![]() (
(![]() ) при всех следующих значениях t
) при всех следующих значениях t
![]()
где N может быть любым целым числом, а ![]() сколь угодно мало при достаточно большом n. Следовательно, какое бы значение t* мы ни взяли, либо t* =t
сколь угодно мало при достаточно большом n. Следовательно, какое бы значение t* мы ни взяли, либо t* =t![]() и тогда
и тогда ![]() , либо t* попадает в некоторый интервал (t0+(k-1)
, либо t* попадает в некоторый интервал (t0+(k-1)![]() , t0 +
, t0 +![]()
![]() ) или
) или
(t0—(k-1)![]() , t0 --
, t0 --![]()
![]() ) и в силу того, что Qn сколь угодно мало при достаточно большом n, существуют сколь угодно близкие к t* значения t', при которых
) и в силу того, что Qn сколь угодно мало при достаточно большом n, существуют сколь угодно близкие к t* значения t', при которых
![]()
Но тогда в силу непрерывности функций ![]() (t),
(t), ![]() (t) мы, очевидно, также имеем
(t) мы, очевидно, также имеем
![]()
Это означает, что функции ![]() (t),
(t), ![]() (t)— постоянные, т. е. траектория L состояние равновесия, что противоречит условию теоремы.
(t)— постоянные, т. е. траектория L состояние равновесия, что противоречит условию теоремы.
Очевидно, все точки траектории L могут быть получены при изменении t в уравнениях (17) от t0 до t0 + ![]() 0 (t0
0 (t0![]() t
t ![]() t0 -
t0 -![]() 0), где t0 — любое фиксированное число. Так как по самому определению
0), где t0 — любое фиксированное число. Так как по самому определению ![]() 0 есть наименьшее число,при котором выполняются равенства(22),то всяким двум значениям
0 есть наименьшее число,при котором выполняются равенства(22),то всяким двум значениям ![]() и t", t0
и t", t0![]() заведомо соответствуют различные точки траектории L. Это и означает, что траектория L является простой замкнутой кривой. В силу леммы 5 эта замкнутая кривая, очевидно, гладкая. Таким образом, лемма доказана.
заведомо соответствуют различные точки траектории L. Это и означает, что траектория L является простой замкнутой кривой. В силу леммы 5 эта замкнутая кривая, очевидно, гладкая. Таким образом, лемма доказана.
Решение, в котором функции ![]() (t) и
(t) и ![]() (t) — периодические функции t, называется периодическим решением. Наименьшее число
(t) — периодические функции t, называется периодическим решением. Наименьшее число ![]() 0 > 0, при котором выполняются равенства (22),— периодом этого решения.
0 > 0, при котором выполняются равенства (22),— периодом этого решения.
Траектория L, соответствующая периодическому решению, называется замкнутой траекторией. Очевидно, все решения, соответствующие данной замкнутой траектории, являются периодическими решениями с одним и тем же периодом. Всякая траектория, не являющаяся замкнутой траекторий или состоянием равновесия, называется незамкнутой траекторией.
Из леммы 7 следует, что у траекторий системы (I) не может быть «самопересечений», т. е. что всякая часть незамкнутой траектории, соответствующая значениям t в любом конечном сегменте, является простой гладкой дугой.
Таким образом, мы получили следующие основные элементарные сведения о траекториях. Траектория может быть: 1) состоянием равновесия, 2) замкнутой траекторией, 3) незамкнутой (несамопересекающейся) траекторией. Эти сведения являются предварительными, так как возможный характер незамкнутых траекторий остается невыясненным.
6. Сопоставление геометрической интерпретации в пространстве R3 и геометрической интерпретации на фазовой плоскости
Как мы уже указывали, каждому решению системы (I) соответствует в ![]() интегральная кривая.
интегральная кривая.
Траектория, очевидно, является проекцией этой интегральной кривой на плоскость (x, у). Из леммы 4 следует, что в траекторию проектируются те и только те интегральные кривые пространства ![]() , которые получаются из одной такой кривой (и, следовательно, друг из друга) сдвигом на произвольный отрезок вдоль оси t. Таким образом, устанавливается естественное соответствие между траекториями динамической системы на фазовой плоскости и интегральными кривыми в пространстве
, которые получаются из одной такой кривой (и, следовательно, друг из друга) сдвигом на произвольный отрезок вдоль оси t. Таким образом, устанавливается естественное соответствие между траекториями динамической системы на фазовой плоскости и интегральными кривыми в пространстве ![]() . При этом могут представиться следующие случаи в зависимости от характера траектории L:
. При этом могут представиться следующие случаи в зависимости от характера траектории L:
L есть состояние равновесия М (а, Ь). Соответствующая интегральная кривая в ![]() является прямой х = а, у = b, параллельной оси t и проходящей через точку М. При сдвиге вдоль оси t эта прямая переходит сама в себя.
является прямой х = а, у = b, параллельной оси t и проходящей через точку М. При сдвиге вдоль оси t эта прямая переходит сама в себя.
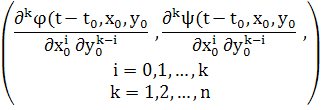
2) L есть замкнутая траектория, соответствующая решению с периодом ![]() 0. Соответствующие интегральные кривые имеют характер «винтовых линий» с шагом
0. Соответствующие интегральные кривые имеют характер «винтовых линий» с шагом ![]() 0 и проектируются в траекторию L. При сдвиге вдоль оси t на отрезок С каждая интегральная кривая переходит в другую кривую, если С не кратно
0 и проектируются в траекторию L. При сдвиге вдоль оси t на отрезок С каждая интегральная кривая переходит в другую кривую, если С не кратно ![]() 0, и сама в себя, если С кратно
0, и сама в себя, если С кратно ![]() 0 (рис. 3).
0 (рис. 3).
3) L — незамкнутая траектория. Каждая интегральная кривая, соответствующая траектории L, при любом сдвиге вдоль оси t, отличном от нулевого, переходит в другую интегральную кривую (рис. 4).
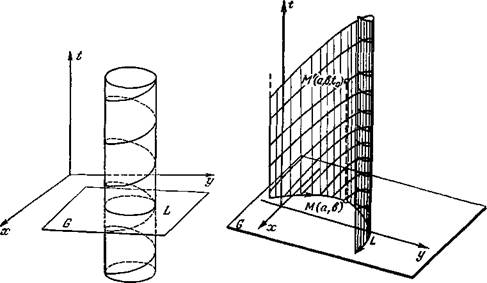
Рис. 3. Рис. 4.
Подчеркнем следующие элементарные факты. Точка, двигаясь по траектории, отличной от состояния равновесия (т. е. «изображающая точка» с координатами х = ![]() (t), y=
(t), y= ![]() (t) ), не может стремиться к точке какой-либо отличной от нее траектории при t, стремящемся к конечному значению. Действительно, в противном случае , интегральные кривые в пространстве (x, у, t) пересекались бы, что невозможно в силу теоремы 1. В частности, точка, двигаясь по траектории, отличной от состояния равновесия, может стремиться к состоянию равновесия либо при t
(t) ), не может стремиться к точке какой-либо отличной от нее траектории при t, стремящемся к конечному значению. Действительно, в противном случае , интегральные кривые в пространстве (x, у, t) пересекались бы, что невозможно в силу теоремы 1. В частности, точка, двигаясь по траектории, отличной от состояния равновесия, может стремиться к состоянию равновесия либо при t![]()
![]() , либо при
, либо при ![]()
7. Направление на траектории. Изменение параметризации
Пусть L — траектория системы (I) и
х = ![]() (t), y =
(t), y = ![]() (t)
(t)
— какое-нибудь соответствующее ей решение.
Мы введем на траектории L определенное направление в качестве положительного. Именно, будем считать положительным направлением на L направление в сторону возрастания t. При таком определении можно сказать, что положительное направление в каждой точке траектории L совпадает с направлением вектора, заданного в этой точке системой (I).
Пользуясь «кинематической» интерпретацией, можно сказать, что положительное направление на L есть то направление, в котором точка с координатами х = ![]() (t), y =
(t), y = ![]() (t) движется по траектории при возрастании t и при котором направление ее скорости в каждой точке совпадает с направлением фазовой скорости.
(t) движется по траектории при возрастании t и при котором направление ее скорости в каждой точке совпадает с направлением фазовой скорости.
Введенное таким образом положительное направление на L не зависит от того, какое из решений, соо