Цифровая радиолиния КИМ-ЧМ-ФМ
Министерство общего и профессионального образования
РГРТА
Кафедра РУС
Курсовая работа на тему:
Цифровая радиолиния КИМ-ЧМ-ФМ
Рязань 2004
Содержание
1) Общая характеристика системы управления
2) Расчет и выбор основных технических характеристик системы
2.1 Определение частоты опроса
2.2 Определение разрядности квантователя
2.3 Выбор группового сигнала и расчет его параметров
2.4 Выбор несущей частоты передатчика
2.5 Расчет энергетического потенциала
3)Контур управления и его анализ
4)Разработка функциональной схемы радиолинии
4.1 Спектр сигнала КИМ-ЧМ-ФМ
4.2 Описание функциональной схемы передатчика
4.3 Описание функциональной схемы приемника
5) Конструкция бортового приемника
6) Заключение
7) Литература
1. Общая характеристика системы управления
сигнал дискретизация квантование кодирование приемник
Командное радиоуправление применяется для широкого класса летательных аппаратов. В системах командного радиоуправления команды вырабатываются на пункте управления и передаются на Л.А. по командной радиолинии.
В системах управления снарядами с помощью радиокоманд обеспечивается наведение снаряда по заданной траектории и выполнение разовых операций (перевод снаряда в режим самонаведение, аварийный подрыв и т.п.). В комплексах космических аппаратов радиокоманды используются для корректирующего управления движением центра масс К.А. и управление работой различной бортовой аппаратуры.
При формировании команд управления траекторией полета Л.А. используются данные, полученные с помощью визиров (средств наблюдения за Л.А. и целями).
Различают следующие системы командного радиоуправления 1): КРУ-1, КРУ-2 и КРУ-3. В системах КРУ-1 визир цели размещается на пункте управления, в системах КРУ-2- на борту Л.А.
Средства визирования цели, которые применяются в системах КРУ-1 и КРУ-2, могут существенно отличаться друг от друга. В системах КРУ-1 основным типом визира цели является активная радиолокационная станция. В системах КРУ-2 в качестве визира можно использовать радиолокационные, телевизионные, оптические и тепловые (инфракрасные) устройства. Применение телевизионной камеры на борту Л.А. повышает эффективность участия оператора в решении задачи селекции целей.
В системах КРУ-1 и КРУ-2 средства визирования Л.А. размещаются на пункте управления. Эти средства работают, как правило, в диапазоне сверхвысоких частот с использованием сигналов активного ответа, что повышает дальность действия таких визиров и точность измерений координат Л.А.
В системах следящего управления снарядами находит применение радиовизир снаряда, который представляет собой радиолокационные станции с активным ответом. Для определения координат космического аппарата используются системы траекторных измерений.
Требования к дальности действия визиров, составу измеряемых величин и точности измерений зависят от назначения системы.
В системах корректирующего радиоуправления К.А. необходимо оценить с высокой точностью либо значения начальных условий для определенного момента времени, либо значения параметров орбиты. Результаты первичных радиотехнических измерений здесь обрабатываются (вторичная обработка) в течение достаточно длительных интервалов времени.
В системах управления снарядами визиры цели, как правило, должны обеспечивать непрерывное получение оценок параметров движения в реальном масштабе времени (следящие оценки). Поскольку дальности в таких системах относительно невелики, то получение требуемых оценок с необходимой точностью технических трудностей обычно не вызывает.
В состав системы командного радиоуправления входят также вычислительные средства, размещаемые на пункте управления. Эти средства предназначаются для выполнения различных математических и логических операций, связанных с управлением Л.А.
В данной работе разрабатывается космическая система связи с КИМ-ЧМ-ФМ. Характер спектра сигнала с многоступенчатой модуляцией в значительной степени определяется спектром сигнала КИМ. Кодово-импульсная модуляция является наиболее распространенным методом цифрового преобразования аналоговых сигналов. При КИМ осуществляется три вида преобразований: дискретизация по времени исходного сигнала, квантование амплитуд дискретных отчетов сигнала и кодирование. Сформированные при дискретизации отчеты преобразуются в группы кодовых символов.
2. Расчет и выбор основных технических характеристик системы
2.1 Определение частоты опроса
Суть дискретизации по времени состоит в том, что непрерывное сообщение заменяется последовательностью его мгновенных значений (отсчетов), взятых в дискретных точках времени. При такой замене из рассмотрения исключается все множество значений непрерывной функции времени, находящихся внутри интервалов времени Tд. Полученная при этом функция имеет вид последовательности отсчетов, взятых в дискретные моменты времени.
Если непрерывная функция времени U(t) имеет спектр, ограниченный полосой частот от нуля до Fв, то эта функция полностью определена последовательностью своих мгновенных значений, взятых в моменты времени, отсчитываемые через интервалы Tд=1/2Fв.

В этом случае интерполирующая функция:
X(t)=sin2pFм(t-кТд)/2pFм(t-кТд);
То есть функция является идеальной интерполирующей функцией для сигнала с прямоугольным спектром. В этом случае частота дискретизации Fд=2Fм. Но это соотношение не может быть использовано на практике, потому что:
1) Сигналов с идеальным прямоугольным спектром нет.
2) Число выборок не равно бесконечности.
На практике частота дискретизации выбирается, исходя из соотношения:
Fд=2cFв, где Fв определяется формой спектра сигнала, в которой сосредоточена основная доля энергии, обычно 0,99. Коэффициент c зависит от вида интерполирующих полиномов и требуемых значений показателя верности. Задаемся 4-ой моделью сигнала (сигнал с колоколообразным спектром), полиномом 2-го порядка и приведенным показателем верности g=0,2% и получим:
c= 5.5/Ög=5,5/0,447=12,3
Отсюда
Fд=12,3*2*6=147,6 (Гц);
2.2 Определение разрядности квантователя
Предположим, что в результате дискретизации получена последовательность непрерывных величин x(nTд). Для передачи по цифровому каналу связи каждый отсчет необходимо проквантовать до конечного множества значений.
1) Дискретизация
2) Квантование
3) Кодирование
Расчет ведется из условия достижения заданного отношения с/ш. Зададимся отношением с/ш: g = 50 дБ;
В литературе показано, что отношение с/ш и разрядность информационного слова связаны следующим соотношением:
g = 3* N2кв/К2пф,
где Кпф – пик фактор сигнала.
Если учесть, что для синусоиды Кпф =Ö3 и мя используем двоичную систему счисления, то:
g = 20*r*log2 = 6r
Тогда r = g /6 = 50/6 =8
2.3 Выбор группового сигнала и расчет его параметров
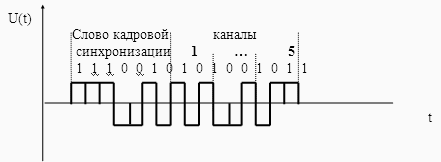
Рис .1
Рисунок соответствует временному уплотнению и синхронной передаче последовательности командных слов одинаковой длительности в течение интервала времени длительностью ТКИ . Этот интервал разбит на равные интервалы длительностью ТКС , каждый из которых закреплен за определенным каналом радиолинии. Число таких интервалов соответствует числу каналов NК в радиолинии. В данной работе Nк=5. Разделение каналов при приеме обеспечивается путем передачи синхронизирующего слова длительностью ТСК. В данной радиолинии в качестве синхрослова выбран код Баркера. Он является лучшим в своем канале. Для уменьшения ошибок, возникающих при обнаружении синхронизирующего сигнала и определении его временного положения, АКФ синхросигнала имеет узкий центральный пик и малый уровень боковых лепестков.
Совокупность командных и синхронизирующих слов, занимающая интервал времени длительностью Тå=ТКИ+ТSK, называют кадром. Синхронизирующее слово передается в начале кадра и называется словом кадровой синхронизации. Это слово отличается от командных слов своей структурой. Этим самым обеспечивается возможность выделения в приемном тракте сигналов кадровой синхронизации, которые используются затем для разделения каналов.
Длительность канального сигнала Тå=1/FД=1/147,6=0,00678 (сек )=6,78 (мс);
Имеем 5 каналов, количество элементарных передаваемых символов в каждом канале равно числу уровней квантования В=8. Таким образом, количество элементарных символов в информационном сигнале NИ=5*8=40. Длительность синхрослова составляет 50%-70% от информационного символа, отсюда Тå=1,5Тки. После чего получаем ТКИ=0,00678/1,5=0,00452 сек, а ТSK= Тå - ТКИ = 0.00226 сек Таким же образом посчитаем количество элементарных символов в кадре NК=NS+NИ .
NS=NИ/2=40/2=20 . Отсюда NК=20+40=60;
Длительность элементарного символа:
tО=TКИ/NК=0,00452/60= 75,3 (мкс);
Тактовая частота:
fТ=1/tО = 1/75,3=13,28 (кГц);
Вид группового сигнала:
| синхрослово | 1 канал | ……….. | 5 канал |
2.4. Выбор несущей частоты передатчика
Для радиолиний Земля – космос выделен диапазон 2025…2110 МГц. Низкие частоты этого диапазона целесообразно использовать для связи на небольшой высоте, т. к. при этом тропосферное и ионосферное ослабление сигнала минимально.
Выберем fнес = 2025 МГц.
Отсюда l= с/ fнес = 0,148 м.
2.5Расчет энергетического потенциала
Энергетическим потенциалом радиолинии называется отношение средней мощности сигнала РС к спектральной плотности шума GШ (мощности шума в полосе 1 Гц), пересчитанное ко входу приемника.
Расчет энергетического потенциала радиолинии позволяет определить ряд основных параметров системы: мощность передатчиков, геометрические размеры антенн, скорость передачи информации и др.
В радиолиниях ближнего космоса достаточно небольшое усиление. Здесь часто оказывается выгодным использовать всенаправленные бортовые антенны, обеспечивающие прием и передачу сигналов во всем пространственном угле.
В качестве наземной передающей антенны возьмем антенну параболического типа.
Мощность сигнала на входе приемника определяется выражением:
РС ВХ=РИЗЛgЕGSЭ/4pr2; (1)
где РИЗЛ=(103¸105)Вт- мощность сигнала, излучаемого передатчиком.
G- КНД антенны передатчика.
r = 250км- расстояние между передатчиком и приемником.
gЕ- коэффициент, учитывающий потери энергии сигнала в среде за счет поглощения.
gЕ=exp(-0.23ar); (2)
где a- коэффициент затухания.
Для l=5см a=0,02-0,2дБ/км
Итак, с учетом (2) выражение (1) принимает вид:
РС ВХ=РИЗЛ(GSэ/4pr2); (3)
Если основными помехами в линии связи являются внутренние флюктуационные шумы и другие случайные помехи шумового типа, то пересчитав все эти помехи ко входу приемника, можно определить результирующую спектральную плотность помех на входе в виде:
NОå(f)=åNОI(f) (4)
где NOI-- спектральная плотность случайной помехи i-го вида, пересчитанная ко входу приемника.
Мощность всех помех на входе приемника, определяемая в полосе частот fэ занимаемой спектром сигнала, равна:
f0+fэ/2
РШ ВХ=ò NОå(f)¶f ; (5)
f0-fэ/2
где f0- частота несущей.
Выражение (5) можно представить в виде:
РШ ВХ=NОå(f)fЭ=NОåfЭ ; (6)
В простейшем случае, когда основной помехой являются только внутренние флюктуационные шумы приемника с равномерной спектральной плотностью N0 , мощность помехи на входе (при согласованном входе) равна:
РШ ВХ=кТЭfЭ ; (7)
где к- постоянная Больцмана (к=1,38*10-23Дж/к).
Тэ- эквивалентная шумовая температура входа.
С учетом выражений (3) и (6) отношение средней мощности шума на входе приемника определяется формулой:
(PC/PШ)ВХ=(РИЗЛGSЭ/4pr2NОåfЭ)exp(-0.23ar); (8)
Это выражение определяет фактическое отношение сигнал / шум на входе приемника при известных параметрах линии связи. Пусть для того чтобы обеспечить требуемую вероятность ошибки при передаче одной двоичной единицы информации , необходимо иметь энергетическое отношение сигнал/ шум:
h2O.ТР=ЕО/NOå=(PC/PШ)ВХ*tО*fЭ; (9)
Тогда требуемое отношение сигнал / шум берут с некоторым запасом (системный запас), т.е.
(PC/PШ)ТР=gСИСТh2O.ТР/tО*fЭ; (10)
где gCИСТ- коэффициент запаса, выбирается от 2 до 10. Зададимся gCИСТ=4.
Для того чтобы линия связи обеспечивала передачу информации с помехоустойчивостью не ниже заданной, необходимо выполнить условие:
(РС/РШ)ВХ³(РС/РШ)ТР; (11)
Приняв во внимание (8), (10) и (11) имеем:
(РИЗЛGSЭ/4pr2NOå)exp(-0.23ar)³gСИСТ h2o ТР/tО; (12)
Шумовая температура: Тэ=1000 К;
Отношение с/ш: g=50Дб;
Длительность элементарного символа: tО=75,3 мкс;
Длина волны: l=14,8 см;
Коэффициент запаса: gСИСТ=4;
Коэффициент затухания: a=0,1 дБ/км;
Коэффициент, учитывающий уменьшение скорости передачи: gR=0,75
Расстояние между передатчиком и приемником: r=250 км;
Скорость передачи информации – R = gR * log2 n/ tО = 23000 бит/с;
Спектральная плотность флюктуационных шумов на входе приемника - NO= кТэ= 1,38 * 10-20
Диаметр бортовой антенны: d=0.5 м;
Диаметр антенны наземной станции: D=25 м;
Коэффициент использования поверхности антенны: hА=0,55;
Требуемая средняя мощность сигнала излучаемого передатчиком в нашем случае выразится формулой:
РИЗЛ³gСИСТ /gR * ln (1/2Рош ) * R * NO *(4lr/pdDhА)2 =1,74 * 10-6;
Берем РИЗЛ = 10 Вт, что позволяет скомпенсировать неучтенные факторы, снижающие качество канала связи, которые приведены ниже.
Ослабление сигнала в свободном пространстве, обусловленное рассеиванием энергии радиоволны, составляет основные потери в радиолиниях. Но есть и дополнительные потери, которые необходимо также учитывать.
LД=LАФУ+LНАВ+LАТМ+LПОЛ ,
где LАФУ - потери в передающих и приемных антенно-фидерных устройств;
LНАВ - потери из-за неточности наведения приемной и передающей антенн;
LАТМ - потери при распространении сигнала в атмосфере;
LПОЛ - потери при поляризации радиоволн;
3. Контур управления и его анализ
Радиотелемеханической системой называется совокупность устройств, предназначенных для управления состоянием и работой различных приборов и агрегатов. Такие системы находят широкое применение как в оборонной технике, так и в народном хозяйстве.
В комплексах летательных аппаратов радиотелемеханические системы используются для управления бортовыми приборами и агрегатами, а также состоянием летательных аппаратов в целом. Такое управление осуществляется подачей на исполнительные устройства приборов и агрегатов (объектов управления) соответствующих команд. Команды формируются на основе контроля (измерения) некоторой в общем случае многомерной величины g(t), которая непосредственно или косвенно характеризует либо условия, в которых находится объект управления, либо текущее состояние объекта.. Для осуществления такого контроля в состав радиотелемеханических систем включаются либо те или иные радиоизмерительные устройства, либо датчики-преобразователи неэлектрических величин в электрические. Формирование команд осуществляется в решающих устройствах, которые в простейших случаях представляют собой схемы сравнения и реле, а в более сложных - счетно-решающие приборы и системы обработки результатов измерений. Команда поступает на управляемый объект через исполнительное устройство. Исполнительные устройства могут быть самыми разнообразными как по принципу действия, так и по сложности.
Существуют автономные и неавтономные радиотелемеханические системы. В первых команды формируются на борту летательного аппарата, во вторых - на пункте управления и передаются на борт летательного аппарата по командной радиолинии.
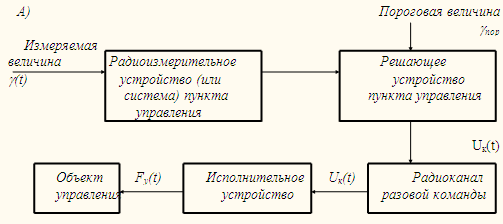
Автономные радиотелемеханические системы обычно осуществляются как системы, предназначенные для выполнения в комплексе летательного аппарата определенных разовых функций. Эти функции выполняются по разовым командам в реальном масштабе времени; они имеют разовый и необратимый характер, т.е. исполняются один раз, в результате чего управляемый объект переходит в такое состояние, из которого не может вернуться к исходному. Обратная связь в подобных радиотелемеханических системах обычно отсутствует. Функциональная схема автономной радиотелемеханической системы приведена на рисунке.

Рис. 2
Измеряемая, монотонно нарастающая (или убывающая) величина g(t) непрерывно воспринимается бортовым радиоизмерительным устройством. Результат измерения обрабатывается в бортовом решающем устройстве и сравнивается с некоторой пороговой величиной gпор. В момент совпадения этих величин (g(t)= gпор) выдается разовая команда в виде скачка напряжения или в виде импульса, поступающая на исполнительное устройство. С выхода исполнительного устройства осуществляется управляющее воздействие Fy(t) на объект управления.
Неавтономные радиотелемеханические системы осуществляются как без обратной связи, так и с обратной связью. В обоих случаях на пункте управления принимается решение о формировании команды и осуществляется ее формирование. Сформированная команда Uк’(t) в реальном масштабе времени или через программно- временное устройство поступает на вход радиоканала разовой команды или командной радиолинии, а затем передается на борт летательного аппарата.
Неавтономные радиотелемеханические системы без обратной связи по выполняемым функциям обычно аналогичны автономным радиотелемеханическим системам. Однако радиоизмерительное устройство, контролирующее величину g(t),находится здесь на пункте управления.
Примером неавтономной радиотелемеханической системы без обратной связи может служить радиосистема выключения двигателя баллистической ракеты при ее пуске на заданную дальность. Такая система включает в себя: радиосистему траекторных измерений на активном участке траектории, решающее устройство, радиоканал разовой команды, исполнительное устройство выключения двигателя и объект управления - ракетный двигатель.
А)Функциональная схема неавтономной радиотелемеханической системы.
Рис.3
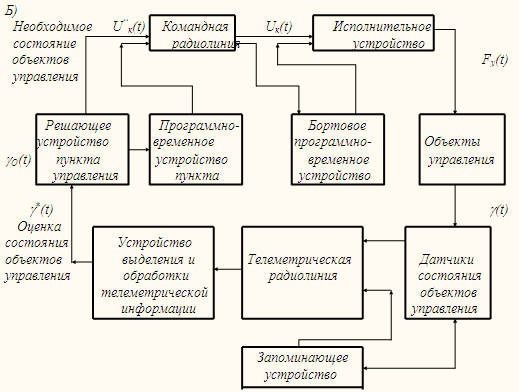
Б) Функциональная схема р/телемеханической системы с обратной связью.
Рис. 4
В радиотелемеханических системах с обратной связью информацию о состоянии и работе объектов управления - бортовых приборов и агрегатов- получают с помощью различного рода датчиков, устанавливаемых на борту летательного аппарата и связанных с контролируемыми величинами g(t). Полученные с датчиков и соответствующим образом обработанные величины поступают непосредственно или через запоминающее устройство на вход телеметрической радиолинии и передаются по ней на пункт управления. На пункте управления в устройстве выделения и обработки телеметрической информации получается оценка состояния объектов управления g*(t), необходимая для осуществления требуемого управления бортовыми приборами и агрегатами. Формирование команд осуществляется в результате сравнения оценки g*(t) c величиной gО(t), задающей необходимое состояние объектов управления. Сформированные команды по командной радиолинии передаются на борт летательного аппарата и поступают на исполнительное устройство, воздействующее на объекты управления. Контур радиотелемеханического управления оказывается замкнутым. В зависимости от решаемых задач, такое управление осуществляется либо как следящее, либо как корректирующее.
Применение радиотелемеханических систем с обратной связью наиболее характерно для управления бортовой аппаратурой космических аппаратов.
4. Разработка функциональной схемы радиолинии
4.1 Спектр сигнала КИМ-ЧМ-ФМ
Сигнал КИМ-ЧМ-ФМ является одним из наиболее часто применяемых сигналов при организации цифровой связи по радиоканалам большой длительности. Символы сигнала КИМ заполняются прямоугольными колебаниями (меандром) разной частоты для нулей и единиц. Сигналом КИМ-ЧМ модулируется по фазе несущее колебание.
Аналитическая запись сигнала КИМ-ЧМ-ФМ имеет вид:
![]()
где: 
-колебания прямоугольной формы (меандр) с частотами w1 и w2, используемыми на второй ступени модуляции сигнала; Пс(t) – последовательность положительных и отрицательных прямоугольных импульсов, т.е. сигнал КИМ.
Общий вид спектра сигнала изображён на рис.5.
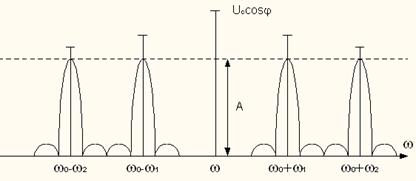
Интенсивность непрерывной части спектра на частотах w0±w1 и w0±w2, т.е. величина А равна:
![]()
где j - девиация фазы на последней ступени модуляции; Р(1) – вероятность появления единиц в сигнале КИМ; t0 – длительность элементарного символа.
Спектр сигнала изображён для случая, когда Р(1)=Р(0). В том случае, когда Р(1)¹Р(0), форма спектра на частотах w0±w1 и w0±w2.
4.2. Описание функциональной схемы передатчика.
В нашей разрабатываемой совмещённой командной радиолинии есть одна особенность: на борту летательного аппарата будет находиться не только приёмник, но и передатчик, который будет передавать информацию иного рода, чем мы ему посылаем: это может быть телеметрическая информация, фотографии (цифровые) местности и т.п.

Рис. 6. Структурная схема передающей части
В простейшем случае работу передатчика можно объяснить следующим образом. На вход коммутатора Ком1 поступают N передаваемых сообщений U1(t), U2(t). С помощью АЦП они преобразуются в цифровой код. Преобразователь кода ПК служит для преобразования кода в последовательный. Схема синхронизации (СС) управляет работой передающей части и вырабатывает следующие сигналы:
1. Сигналы управления коммутатором Ком 1. Эти сигналы имеют частоту повторения, определяемую верхней частотой спектра передаваемых сообщений;
2. Сигналы управления АЦП;
3. Сигналы управления преобразователем кода ПК;
4. Сигнал кадровой синхронизации. Как правило, в качестве сигнала синхронизации используется m-последовательность, длина которой больше или равна ½ длины информационной части.
С помощью сумматора (+) формируется сигнал на видеочастоте (рис.7.).
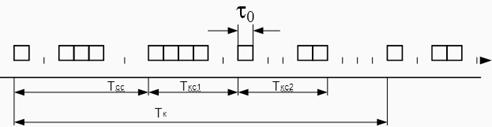
На рисунке: Тсс – длительность слова синхронизации, Ткс – длительность командного слова, t0 – длительность элементарного символа КИМ.
В групповом сигнале символы следуют с тактовой частотой fт, которая определяется задающим тактовым генератором системы синхронизации. С помощью коммутатора КОМ 2 символ "1" заполняется меандром с частотой f1, а символ "0" – меандром с частотой f2. В результате получается сигнал КИМ-ЧМ, который затем подаётся на фазовый модулятор (ФМ). Сигнал на поднесущей модулирует по фазе колебание на несущей частоте w0. Усилитель мощности усиливает полученный сигнал КИМ-ЧМ-ФМ для обеспечения необходимого коэффициента усиления всего передатчика. Антенно-фидерный тракт осуществляет согласование антенны с передатчиком.
4.3 Описание функциональной схемы приёмника
Структурная схема приёмной части радиолинии изображена на рис.8 .
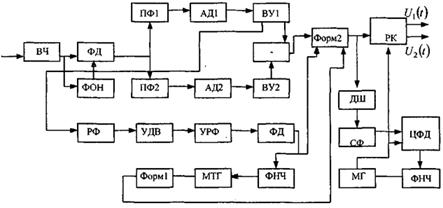
Рис. 8. Структурная схема приемной части
В высокочастотной части приёмной стороны происходит перенос несущей частоты на промежуточную. Формирователь опорного напряжения
|