Промерный эхолот
Состояние мореплавания к 2000 г. характеризуется высокими скоростями судов, значительной интенсивностью грузопассажирских перевозок на основных морских путях, увеличением количества крупнотоннажных судов транспортного и промыслового флотов, Очевидно, что в таких условиях обеспечение безопасности плавания усложняется. В связи с этим возрастают требования к составу судовых технических средств навигации и их техническим характеристикам.
Правила Регистра РФ по конвенционному оборудованию морских судов предусматривают обязательное включение в состав навигационного оборудования морских судов эхолотов.
Современные эхолоты по своему назначению делятся на следующие основные группы: навигационные, промерные и рыбопоисковые. Профессиональные гидрографические промерные эхолоты существенно отличаются от рыбопоисковых записью исходных данных на бумажный носитель или в память, более узкой диаграммой направленности излучателя, более высокой (и обязательно оговоренной производителем в технических характеристиках и подтвержденной сертификатом) точностью определения глубины, возможностью ввода поправок на параметры воды и наличием дополнительных сервисных функций.
Принцип работы эхолота основан на измерении промежутка времени от момента излучения ультразвукового импульса до момента его приема после отражения от грунта. Глубина, измеряемая эхолотом, определяется как:
![]()
Где H- измеряемая глубина м; с- скорость распространения ультразвука в воде, м/с; t – время прохождения сигнала от антенны до грунта и обратно.
Эхолот работает следующим образом. Электрические колебания ультразвуковой частоты, формируемые высокочастотным генератором при измерении малых глубин, преобразуются высокочастотной антенной в механические колебания, которые передаются водной среде. Колебания водной среды, отраженные от грунта, возвращаются к антенне через определенный промежуток времени, пропорциональный глубине. В антенне механические колебания преобразуются в электрические сигналы , которые передаются на индикаторы.
Временной интервал от момента излучения ультразвукового зондирующего импульса до момента его приема после отражения от дна в определенном масштабе отображается на самописце и цифровом указателе глубин.
В приборе сигнализации глубины осуществляется сравнение промежутка времени от момента излучения до приема отраженного от дна сигнала с заданным интервалом времени, соответствующим установленной глубине. При совпадении указанных интервалов включается сигнализация, свидетельствующая о выходе судна на заданную глубину.
Выбор рабочей частоты.
Значение дальности действия гидроакустических приборов определяется величинами, зависящими от частоты так, например, от частоты зависит уровень помех, полоса пропускания частот приемного тракта, коэффициент концентрации и.т.д.
Расчет рабочей частоты будем проводить по формуле
 для активной системы , r - глубина
для активной системы , r - глубина
![]()
При известной рабочей частоте можно вычислить длину волны в воде. Она определяется из соотношения:

где с – скорость звука в воде , f - рабочая частота.
![]()
![]()
Длина волны равна 8 мм. При рабочей частоте 180 кГц.
Эхолот работает как в пресной, так и в соленой воде. Как известно скорость распространения звука воде зависит от ее температуры и солености и может колебаться от 1450 до 1550 м/с. В таких условиях погрешность измерения глубины может достигать 3%
Определение длительности зондирующего импульса
Длительность зондирующего импульса определяет разрешающую способность аппаратуры и протяженность мертвой зоны по дальности. Чем больше длительность зондирующего импульса. Тем большее расстояние занимает импульс в пространстве и тем больше должно быть расстояние между объектами для их раздельной локации. Длительность импульса влияет на дальность обнаружения. Для повышения разрешающей способности и сокращения протяженности мертвой зоны желателен короткий импульс, а для повышения отношения сигнал /помеха необходим зондирующий импульс большей длительности. Величина импульсов гидролокаторов обычно лежит в пределах от 0,5-1,0 до 20-30 мс. Известно, что для гидролокатора длительность зондирующего импульса можно найти из соотношения:
Где ![]() - коэффициент, определяющий частоту заполнения импульса
- коэффициент, определяющий частоту заполнения импульса
![]() =80-100
=80-100
С- скорость звука в воде.
Подставим значения и получим:
![]()
Откуда 0,44 < J < 0,66
Целесообразнее выбрать длительность зондирующего импульса равной 0,5 мс.
Определение периода зондирующего импульса
Период следования импульсов определяется из следующих соображений.
-до получения эхо-сигнала с максимальной дистанции повторное излучение не производится.
![]()
Где ![]() - максимальная дистанция (100 метров)
- максимальная дистанция (100 метров)
С- скорость звука. С =1500 м/с
![]()
![]()
При проведении измерений данным эхолотом глубина района при отсутствии передвижения практически не меняется. В целях экономии энергии можно излучать импульс на порядок реже.
Для удобства счета выберем период 1с. T=1c.
Общая полоса частот приемного тракта
Из работы данного эхолота следует, что ограничения эффектом Доплера можно пренебречь, таким образом, на полосу пропускания частот влияет нестабильность частотно передающего устройства. Таким образом, для общей полосы частот приемного тракта можно написать:
![]()
Где ![]() - полоса частот, обусловленная приемом импульсов,
- полоса частот, обусловленная приемом импульсов,![]() - отклонение частоты из-за нестабильности рабочей частоты передающего тракта.
- отклонение частоты из-за нестабильности рабочей частоты передающего тракта.
Величину полосы пропускания, обусловленную нестабильностью передающего и приемного и приемного трактов гидролокатора, принимаем равной ![]() =100 Гц
=100 Гц
Тогда, подставив численные величины, получим:
![]()
Определение коэффициента пространственного затухания
Ослабление в воде амплитуды колебаний ультразвуковых волн происходит вследствие расширения фронта последних, а так же поглощения и рассеяния для плоской волны затухание обусловлено только поглощением и рассеянием и оценивается коэффициентом затухания B.
Экспериментально установлено, что коэффициент затухания B ультразвукового сигнала в воде зависит от его частоты f , температуры t , солености воды s и гидростатического давления p в зоне его распространения.
Коэффициент пространственного затухания B , ДБ/км. Определен по монограмме на следующем рисунке.
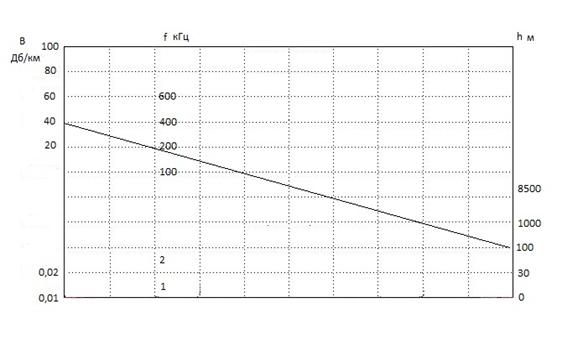
Исходя из монограммы , B=40 ДБ/км
Определение размеров преобразователя
Для данного эхолота необходима антенна с характеристикой направленности (ХН), имеющую круговую симметрию оси, проходящей через центр антенны перпендикулярно к ее поверхности. Все точки поверхности антенны должны колебаться с одинаковой амплитудой, синфазно такой антенной является плоская антенна круглой апертурой (круглый поршень).
Для уменьшения стоимости антенны целесообразно выбрать сплошной круглый поршень, т.е. диск.
Диаметр элемента ,d , получим из формулы
![]()
![]() =
=![]() , раствор главного лепестка
, раствор главного лепестка ![]()
Радиус 2.5 см.
При известном значении радиуса диска можно найти площадь приемно-излучающей поверхности по формуле ![]()
Подставив значения в это выражение, получим: ![]()
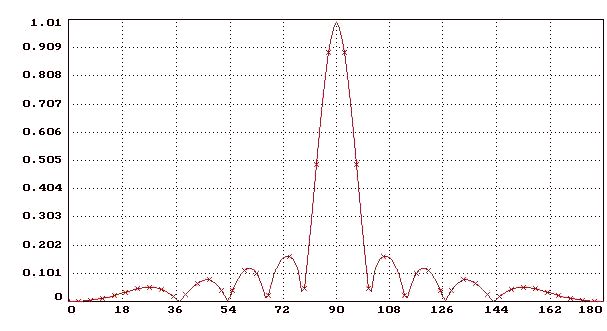
Для расчета характеристики направленности антенны будем использовать «Систему автоматизированного проектирования для формирования и расчета гидроакустических антенн»
Указав все исходные данные, получаем вид ХН:
Выбор активного материала
В современных ГАП, в качестве активных элементов, используют пьезокерамику различных составов промышленного производства. Достоинства пьезокерамических преобразователей, обусловившее широкое их использование в гидроакустических антеннах, - большая эффективность, возможность изготовления элементов любой формы возбуждение различных видов колебаний, широкий частотный диапазон. В зависимости от назначения пьезокерамические материалы делят на четыре класса. Материалы первого класса пригодны для производства пьезоэлементов приемников и излучателей малой и средней мощности. Удельная чувствительность, достаточно полно характеризующая эффективность преобразователя в режиме приема , на частоте электромеханического резонанса пропорциональна
![]()
Из представленных в литературе материалов удельная чувствительность на резонансе будет больше у приемников из ЦТСНВ-1.(цирконат- титанат свинца, натрия, висмута)
Основные характеристики пьезокерамики ЦТСНВ-1:
плотность ![]()
![]() ;
;
модули упругости ![]()
![]() ;
;
модули податливости ![]()
 ;
;
скорости звука ![]()
![]() ;
;
относительная диэлектрическая проницаемость ![]()
![]() ;
;
пьезоэлектрические ![]()
![]() ;
;
КЭМС ![]()
![]() ;
;
![]()
![]() .
.
![]()
![]()
Расчет параметров преобразователя
Проектируемая антенна должна обеспечивать полосу пропускания не менее
![]()
Для обеспечения этого требования механическая добротность антенны не должна превышать ![]() . Такую добротность могут обеспечить полуволновые (без накладок) стержневые преобразователи, при продольном пьезоэффекте.
. Такую добротность могут обеспечить полуволновые (без накладок) стержневые преобразователи, при продольном пьезоэффекте.
Находим резонансный размер ![]() , решая трансцендентное уравнение
, решая трансцендентное уравнение
![]()
![]()
![]()
Итак , толщина диска получилась равной 5 мм . Рассмотрим режим излучения .
Массу активного стержня можно найти из выражения:
![]() кг.
кг.
Эквивалентная масса может быть найдена по формуле
![]() кг.
кг.
Эквивалентная податливость преобразователя равна
![]()
Подставляя численные значения в выражение, получим:
![]() м/н
м/н
Механическая добротность преобразователя
![]()
Примем акустико-механический КПД ![]() тогда согласно выражению, получим:
тогда согласно выражению, получим:
![]()
Коэффициент электромеханической трансформации (КЭМТ) для сплошного преобразователя при продольном пьезоэффекте равен:
![]()
Подставим численные значения
![]() Н/В
Н/В
Акустическую мощность при резонансе можно найти из выражения:
Подставив численные значения, получим значение акустической мощности при максимально допустимом напряжении ![]() В.
В.
![]() Вт
Вт
Удельная акустическая мощность
![]()
![]()
Чувствительность излучателя. Чувствительность по напряжению ![]() определяем как отношение акустического давления создаваемого на оси на расстоянии 1 м, к подводимому напряжению. Из теории излучения известно выражение для амплитуды давления на оси излучателя
определяем как отношение акустического давления создаваемого на оси на расстоянии 1 м, к подводимому напряжению. Из теории излучения известно выражение для амплитуды давления на оси излучателя ![]() , где
, где ![]() - амплитуда колебательной скорости,
- амплитуда колебательной скорости, ![]() - площадь излучающей поверхности введем в выражение для
- площадь излучающей поверхности введем в выражение для ![]() силу
силу ![]() . При резонансе активное механическое сопротивление
. При резонансе активное механическое сопротивление ![]() Сила связана с электрическим напряжением через КЭМТ
Сила связана с электрическим напряжением через КЭМТ ![]() В результате
В результате
![]()
Подставляя численные значения ,получим:
![]() Па м/В
Па м/В
Итак , чувствительность в режиме излучения равна 507 Па м/В
Рассмотрим режим приема.
Известно , что чувствительность приемника максимальна при частоте электромеханического резонанса ![]() определяемой из выражения .
определяемой из выражения .
![]()
Где ![]() - рабочая частота.
- рабочая частота.
Подставим численные значения.
![]() кГц
кГц
Статическая электрическая емкость равна:
![]()
Где ![]() найдем из отношения:
найдем из отношения:
![]() Ф/м
Ф/м
Подставив численные значения, получим:
![]() Ф
Ф
Чувствительность приемника при электромеханическом резонансе можно найти , пользуясь формулой :
Подставляя численные значения, получим:
![]() В/Па
В/Па
Удельная чувствительность приемника при резонансе:
 В/Па
В/Па
Далее необходимо найти коэффициент полезного действия КПД
![]()
Вблизи резонанса электроакустический КПД, представленный через произведение электромеханического и акустико-механического коэффициентов полезного действия, определяется в значительной мере последним, поскольку электрические потери в пьезокерамике обычно невелики.
![]()
Сопротивление электрических потерь ![]() можно найти из выражения.
можно найти из выражения.
![]()
Подставим в формулу численные выражения:
![]() Ом
Ом
Механическое сопротивление, приведенное к электрической стороне электромеханической схемы равно:
![]()
Где ![]() - полное активное механическое сопротивление
- полное активное механическое сопротивление ![]()
Тогда выражение для механического сопротивления примет вид:
Подставим в формулу численные выражения:
Подставим полученные значения в выражение для электромеханического КПД.
![]()
Тогда согласно выражению полный КПД будет:
![]()
Найдем коэффициент концентрации:
Электромеханическую добротность найдем из выражения:
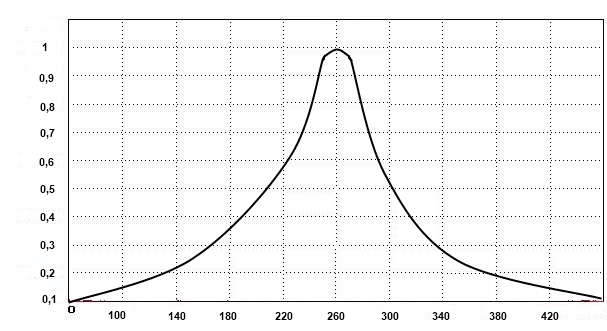
Частотную зависимость чувствительности рассчитаем по формуле:
Где ![]() - частота анти резонанса.
- частота анти резонанса.
Частотная зависимость чувствительности
Помехи при работе эхолота
Гидроакустические шумы наблюдаются в любом районе океана. Их природа весьма разнообразна и пока еще далеко не достаточно изучена. Существует следующая классификация шумов океана.
Динамические шумы, возникновение которых связано с биологической жизнью различных представителей морской фауны.
Сейсмические шумы, вызванные тектонической и вулканической деятельностью, а так же сопровождающие образование волн, цунами и.т.д.
Технические шумы, создаваемые деятельностью человека , в том числе шумы судоходных трасс или шумы технических сооружений в гаванях и.т.д.
К техническим помехам относятся так же электрические помехи, возникающие при работе различных источников и потребителей тока.
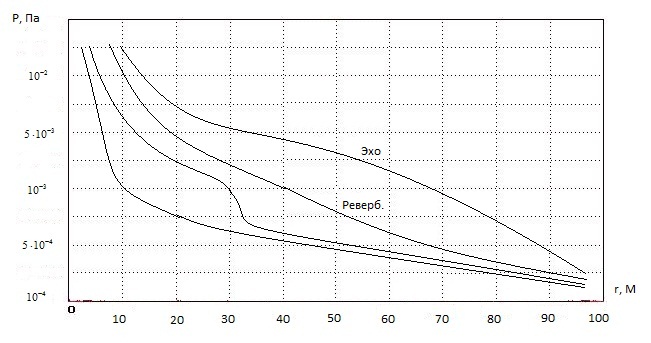
Определение интенсивности эхосигнала.
В задании акустические помехи равны ![]()
![]()
Превышение сигнала над помехой 6 дБ.
 где
где ![]()
Подставив численные значения, получим:
Интенсивность помехи найдем из выражения:
Подставив численные значения, получим: ![]()
![]()
![]()
Таким образом, интенсивность сигнала можно найти из выражения:
![]()
Расчет акустической мощности
Акустическая мощность – один из основных параметров, характеризующий гидролокационную аппаратуру, определяется выражением, вытекающим из основного уравнения гидролокации.
Где ![]() - интенсивность сигнала, r – дальность действия эхолота,
- интенсивность сигнала, r – дальность действия эхолота, ![]() - коэффициент концентрации антенны ,
- коэффициент концентрации антенны , ![]() - характеристика направленности антенны ,
- характеристика направленности антенны , ![]() - радиус эквивалентной сферы,
- радиус эквивалентной сферы, ![]() - коэффициент пространственного затухания.
- коэффициент пространственного затухания.
Для определения акустической мощности известны все величины, кроме радиуса эквивалентной сферы. Эквивалентным радиусом цели называется радиус такой зеркально отражающей неподвижной сферы, которая на расстоянии, равном расстоянию до отражающей цели, создаёт в точке приема эхосигнал, интенсивность которого совпадает с интенсивностью эхосигнала от цели. В данном случае в качестве цели выступает дно, а эквивалентный радиус дна не определен, т.е. его можно заменить коэффициентом отражения от дна. В условии
![]() .
.
При замене ![]() выражение принимает иной вид:
выражение принимает иной вид:
Подставив численные значения, получим:
![]() Вт. (Ил), 6Вт. (Песок), 2 Вт. (Гранит)
Вт. (Ил), 6Вт. (Песок), 2 Вт. (Гранит)
Далее для песка:
Электрическая мощность генераторного устройства определяется по формуле
![]()
Где ![]() - электроакустический коэффициент полезного действия
- электроакустический коэффициент полезного действия
![]()
Тогда:
![]() Вт
Вт
Напряжение возбуждения в преобразователе можно найти из выражения:
 В
В
Удельная акустическая мощность:
![]()
![]()
Реверберационные помехи
При работе на мелководье действуют реверберационные помехи, такие как объемные и донные.
Под объемной реверберацией подразумевается реверберация, обусловленная рассеянием звука малыми частицами, находящимися в слоях воды, - газовыми пузырьками , твердыми взвешенными частицами , термическими неоднородностями .и.т.д.
Давление помех, создаваемое реверберацией можно рассчитать для объемной реверберации:
Где ![]() - акустическая мощность,
- акустическая мощность, ![]() =
= ![]() Вт. (Ил), 6Вт. (Песок), 2 Вт. (Гранит).
Вт. (Ил), 6Вт. (Песок), 2 Вт. (Гранит). ![]() - протяженность зондирующего импульса (м),
- протяженность зондирующего импульса (м), ![]() - акустическое сопротивление воды (
- акустическое сопротивление воды (![]()
![]() ) ,
) , ![]() - коэффициент учитывающий направленные свойства излучателя и приемника , принимаем
- коэффициент учитывающий направленные свойства излучателя и приемника , принимаем ![]() = 0,7, величина безразмерная,
= 0,7, величина безразмерная, ![]() - коэффициент пространственного затухания , B=40 ДБ/км,
- коэффициент пространственного затухания , B=40 ДБ/км, ![]() - расстояние от излучателя до плоскости рассеяния звука r = 100 м.
- расстояние от излучателя до плоскости рассеяния звука r = 100 м. ![]() - коэффициент характеризующий рассеивающую способность моря число пузырьков в единице объема воды. По экспериментальным данным
- коэффициент характеризующий рассеивающую способность моря число пузырьков в единице объема воды. По экспериментальным данным
![]() =
=![]() , берем
, берем ![]()
![]() =
=![]()
![]() .
.
Подставляя численные значения, получим зависимость давления помех для объемной реверберации от дистанции.
Структурная схема
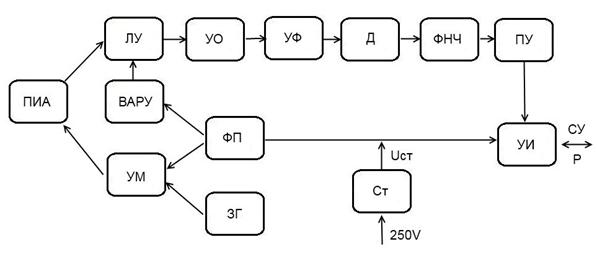
ЗГ - Задающий генератор, ФП - формирователь посылки, УМ - Усилитель мощности, ПИА – приемно-излучающая антенна, ЛУ – линейный усилитель, УО – усилитель ограничитель, УФ – усилитель фильтр, Д – детектор, ФНЧ – фильтр низкой частоты, ПУ – пороговое устройство, УИ – устройство измерения дистанции, ВАРУ – система временной автоматической регулировки усиления, СТ – стабилизатор, СУ – система управления, Р – регистратор.
Принцип действия эхолота
Сигнал тракта излучения состоящего из ФП, ЗГ и УМ, заданной длительности, частоты поступает в ПИА, которая излучает посылку в морскую среду. Отраженный от дна и ослабленный во много раз сигнал поступает на ПИА и далее вход приемного тракта, состоящего из ЛУ, УО, УФ, Д, ФНЧ, ПУ и УИ. Усиленный и приведенный к заданному виду сигнал поступает на УИ, где происходит считывание.
Последующим сигналом с ФП счетчик в УИ останавливается. Цифровой код, полученный после остановки счетчика, соответствует высоте плавания над грунтом НПА. Полученный цифровой код передается в систему управления НПА и регистратор.
Приемно-излучающее устройство
В эхолотах источниками и приемниками акустических волн служат акустические антенны, с помощью которых электрические колебания генератора преобразуются в акустические колебания и, наоборот, акустические колебания, отразившиеся от дна, преобразуются в электрические сигналы, поступающие на вход усилителя эхолота.
Основным элементом акустических антенн являются электроакустические преобразователи, действие которых основано на пьезоэлектрическом или магнитострикционном эффектах.
В качестве примера акустической антенны, в которой пьезопреобразователи размещаются на накладке (мембране), рассмотрим конструкцию антенны эхолота типа НЭЛ-М3Б.
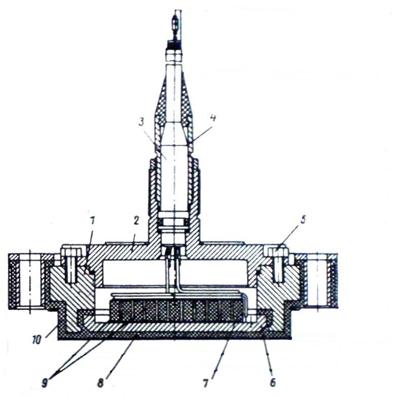
Антенна содержит блок 9 пьезоэлементов 7,корпус,1 крышку 2 и кабель 3. Соединение крышки с корпусом осуществляется с помощью болтов 5. Герметизация обеспечивается резиновой прокладкой 10.
Кабель завулканизирован в металлическую втулку и крепиться к крышке гайкой 4 кабельного ввода, которая одновременно защищает кабель от повреждения в месте крепления.
Блок пьезоэлементов состоит из мембраны 6, завулканизированной в корпус. На мембране наклеены пьезоэлементы 7. В корпусе имеются отверстия, в которые устанавливаются металлические втулки для крепления антенны на судне. С целью обеспечения акустической развязки антенны от вибрации корпуса судна и изоляции мембраны от внешней среды корпус и блок пьезоэлементов завулканизированы резиной. Для предохранения излучающей поверхности антенны от повреждений при транспортировке и хранении предусмотрен защитный щиток 8, который снимается после установки антенны на судно.
Пьезоэлектрический эффект заключается в том что, при сжатии или растяжении пластин, изготовленных из материалов, обладающих пьезоэлектрическими свойствами, на их гранях появляются электрические заряды, вызывающие электрическое поле, напряженность которого равна:
Где ![]() - напряженность электрического поля, возникающего вдоль оси I пьезоэлектрика;
- напряженность электрического поля, возникающего вдоль оси I пьезоэлектрика; ![]() - пьезоэлектрическая постоянная пьезоэлектрика;
- пьезоэлектрическая постоянная пьезоэлектрика; ![]() - диэлектрическая постоянная закрепленного пьезоэлектрика;
- диэлектрическая постоянная закрепленного пьезоэлектрика; ![]() - линейная деформация пьезоэлектрика в направлении оси I .Следует отметить, что все пьезоконстанты связаны между собой, так что при описании пьезоэлектрических свойств кристаллов можно ограничиться одной из них. При расчете акустических антенн наиболее часто пользуются значениями пьезоэлектрической постоянной
- линейная деформация пьезоэлектрика в направлении оси I .Следует отметить, что все пьезоконстанты связаны между собой, так что при описании пьезоэлектрических свойств кристаллов можно ограничиться одной из них. При расчете акустических антенн наиболее часто пользуются значениями пьезоэлектрической постоянной ![]() или пьезоэлектрического модуля
или пьезоэлектрического модуля ![]()
![]() , которые связаны между собой соотношением
, которые связаны между собой соотношением
![]()
где ![]() модуль Юнга пьезоэлектрика, определенный при отсутствии электрического поля.
модуль Юнга пьезоэлектрика, определенный при отсутствии электрического поля.
Заключение
В результате проделанной работы разработан промерный эхолот со следующими параметрами:
дальность действия 100м
рабочая частота 180 кГц
длительность зондирующего импульса равной 0,5 мс
раствор главного лепестка ![]()
полоса пропускания ![]()
акустическая мощность ![]() Вт
Вт
напряжение питания 250 В.
Разработана структурная схема и конструкция приемно-излучающего устройства.
Разработанный прибор удовлетворяет требованиям, указанным в задании.
Список литературы
1. Б.П. Белов. Проектирование информационно – управляющих систем подводной робототехники. ГМТУ,2008 г.
2. Г.М. Свердлин. Гидроакустические преобразователи и антенны, Л.,Судостроение,1988 г.
3. А.А. Хребтов. Судовые эхолоты. Л. Судостроение 1982.