Строение и функции биомеханической системы двигательного аппарата
Движения человека в значительной мере зависят от того, каково строение его тела и каковы его свойства. Чрезвычайная сложность строения и многообразие свойств тела человека, с одной стороны, делают очень сложными сами движения и управление ими. Но, с другой стороны, они обусловливают необычайное богатство, разнообразие движений, до сих пор недоступное в целом ни одной самой совершенной машине.
Биомеханика изучает в теле человека, в его опорно-двигательном аппарате, преимущественно те особенности строения и функций, которые имеют значение для совершенства движений. Отвлекаясь от деталей анатомического строения и физиологических механизмов двигательного аппарата, рассматривают упрощенную модель тела человека — биомеханическую систему. Она обладает основными свойствами, существенными для выполнения двигательной функции, но не включает в себя множество частных деталей.
Таким образом, биомеханическая система — это упрощенная копия, модель тела человека, на которой можно изучать закономерности движений.
Биомеханическая система тела человека состоит из биомеханических цепей. Множество частей тела, соединенных подвижно, образует биокинематические цепи. К ним приложены силы (нагрузки), которые вызывают деформации звеньев тела и изменение их движений.
Звенья биокинематических цепей
Биокинематические цепи опорно-двигательного аппарата состоят из подвижно соединенных звеньев (твердых, упругих и гибких) и отличаются их переменным составом, своей длиной и формой (составные рычаги и маятники).
Фиксирование суставов (блокада) и их освобождение (снятие динамических связей — тяги мышц) изменяют число движущихся звеньев в цепи. Она может превратиться как бы в одно звено или сохранять движение в части сочленений или во всех сочленениях.
Расстояние по прямой от проксимального сочленения до конца открытой цепи при ее сгибании-разгибании изменяется. Многозвенные маятники поэтому имеют переменную длину. Это влияет на величину инертного сопротивления (изменения момента инерции).
Биокинематические цепи, замыкаясь геометрически (связыванием между собой концевых звеньев), изменяют свои свойства (передача усилий, возможности управления). В частности, возникают составные рычаги со сложной передачей тяг многосуставных мышц. Твердые; Звенья (кости), упругие (мышцы) и гибкие (связки, сами мышцы; и их сухожилия), изменяя степень и характер своего участия в движениях, обеспечивают многообразные возможности движений.
Механизмы соединений
Механизмы соединений звеньев в биомеханических цепях и неодноосных сочленениях позволяют определять требуемое движение благодаря образованию биодинамически полносвязного механизма.
Биодинамически полносвязный механизм (биомеханизм) характеризуется выключением лишних в данном движении степеней свободы. Тяги групп мышц обеспечивают требуемое направление движений звеньев в биокинематических цепях и регулирование их скоростей. Кроме этого, мышцы при необходимости ограничивают и размах движений, затормаживая звенья раньше, чем наступает пассивное ограничение (костно-суставно-связочное).
Направление движений, скорости звеньев и размах движений в ряде суставов взаимосвязаны благодаря совместному действию многосуставных мышц.
Биокинематические пары и цепи
Соединенные два соседних звена тела образуют пару, а пары, в свою очередь, соединены в цепи.
Биокинематическая пара — это подвижное (кинематическое) соединение двух костных звеньев, в котором возможности движений определяются его строением и управляющим воздействием мышц.
В технических механизмах соединения двух звеньев — кинематические пары — устроены обычно так, что возможны лишь вполне определенные, заранее заданные движения. Одни возможности не огра-ничены (их характеризуют степени свободы движения), другие полностью ограничены (их характеризуют степени связи)
Различают связи: а) геометрические (постоянные препятствия перемещению в каком-либо направлении, например костное ограничение в суставе) и б) кинематические (ограничение скорости, например мышцей-антагонистом).
В биокинематических парах имеются постоянные степени связи которые определяют собой сколько как максимум и каких остается степеней свободы движения. Почти все биокинематические пары в основном вращательные (шарнирные); немногие допускают чисто поступательное скольжение звеньев относительно друг друга и лишь одна пара (голеностопный сустав) — винтовое движение.
Биокинематическая цепь — это последовательное либо незамкнутое (разветвленное), либо замкнутое соединение ряда биокинематических пар (рис. 1).
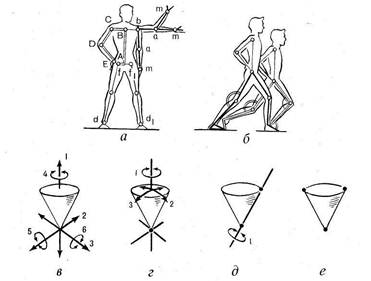
Рис. 1. Биокинематические цепи тела человека: а - виды цепей, ат - незамкнутая, ABCDEA-замкнутая на себя, dff1d1d- замкнутая через опору; б - взаимосвязь движений в замкнутой цени; в, г, д, е - степени свободы движений тела.
В незамкнутых цепях имеется свободное (конечное) звено, входящее лишь в одну пару. В замкнутых цепях нет свободного конечного звена, каждое звено входит в две пары.
В незамкнутой цепи, следовательно, возможны изолированные движения в каждом отдельно взятом суставе. В двигательных действиях движения в незамкнутых цепях происходят обычно одновременно во многих суставах, но возможность изолированного движения не исключена.
В замкнутой цепи изолированные движения в одном суставе невозможны: в движение неизбежно одновременно вовлекаются и другие соединения (рис. 1 (б)).
Значительная часть незамкнутых биокинематических цепей оснащена многосуставными мышцами. Поэтому движения в одних суставах через такие мышцы бывают связаны с движениями в соседних суставах. Однако при точном управлении движениями во многих случаях эту взаимную связь можно преодолеть, «выключить». В замкнутых же цепях связь непреодолима и действия мышц обязательно передаются на отдаленные суставы.
Незамкнутая цепь может стать замкнутой, если конечное свободное звено получит связь (опора, захват) с другим звеном цепи (непосредственно или через какое-либо тело).
Движения в биокинематических цепях
В биокинематических цепях тела человека движение может передаваться от звена к звену. Скорость, например, кисти при броске мяча может быть результатом движений ног и туловища, а также движений в суставах руки. Движение кисти в этом случае как бы составляется из движений других звеньев тела. Движение, обусловленное движениями ряда звеньев, в биомеханике называют составным
Составляющие составного Движения
Составное движение образуется из нескольких составляющих движений звеньев в сочленениях биокинематической цепи.
В простейших случаях в механике складываются два поступательных движения двух тел.
Когда в составном движений принимают участие два тела, то обычно составляющие движения называют переносными и относительными. Платформа как бы переносит на себе движение по ней груза; движение платформы переносное. Движение же груза по платформе относительно системы отсчета, связанной с самой платформой, относительное. Тогда движение груза в неподвижной системе отсчета (Земля) результирующее: это результат двух составляющих движений.
В теле человека таких движений не бывает, так как почти во всех суставах звенья движутся вокруг осей сочленений. В биокинематических цепях обычно движется много звеньев; одни «несут» на себе движения других (несущие и несомые движения). Несущее движение (например, мах бедром при выносе ноги в беге) изменяет несомое (сгибание голени).
При движениях в незамкнутой кинематической цепи угловые перемещения, скорости и ускорения, если они направлены в одну сторону, складываются. Разнонаправленные движения не складываются, а вычитаются (суммируются алгебраически).
Сложнее составные движения, в которых составляющие движения вращательные (по дуге окружности) и поступательные (вдоль радиуса)
В составном движении, образованном из вращательных составляющих движений (в биокинематической цепи), вследствие суммирования равнонаправленных и вычитания разнонаправленных движений в разных суставах всегда происходит прибавление движения и вдоль радиуса (поступательное). Значит, биокинематическая цепь (по прямой линии — от ее начала до конца) укорачивается или удлиняется (например, при махе рукой, ногой в прыжках). Вектор v груза повернулся в сторону вращения. Эти два изменения скорости обусловлены ускорением Кориолйса. Когда биокинематическая цепь укорачивается, кориолисово ускорение звеньев, приближающихся к оси вращения, направлено навстречу вращению, а когда удлиняется, — в сторону вращения. От кориолйсова ускорения зависит убыстрение и замедление углового поворота, что можно объяснить появлением кориолйсовых сил инерции.
В биокинематических цепях с большим числом степеней свободы движений кинематика очень сложна. Каждое движение в сочленениях незамкнутой цепи (например, свободной конечности) влияет на траектории, скорости и ускорения более отдаленных звеньев. В этих случаях характеристики составных движений проще регистрировать, чем рассчитывать. Чаще всего определить их заранее нельзя: слишком уж много возможных вариантов. В процессе тренировки происходит согласование движений звеньев, необходимое для достижения цели, обеспечивается необходимая плавность и рациональная форма траекторий, происходит согласование величины и направлений скоростей; регулируется быстрота нарастания и снижения ускорений. Последнее определяет резкость движений и зависит от быстроты увеличения и ослабления усилий. Одновременно ритмы движений звеньев и цепей согласуются в общий ритм действия. Происходит сложная интеграция движений биомеханической системы посредством процесса управления движениями.
В зависимости от направления скоростей движения звеньев тела человека могут быть возвратно-вращательными, возвратно-поступательными и круговыми.
Строение сочленений не позволяет совершать движения в суставах по «принципу колеса», т. е. делать неограниченный поворот вокруг оси сустава в одну сторону. Поэтому почти все движения имеют возвратный характер. Возвратно-вращательные движения напоминают движения маятника вокруг оси, расположенной поперек биокинематической цепи (сгибание-разгибание) или продольно (супинация-пронация).
Определенное согласование вращательных движений в различных суставах биокинематической цепи позволяет конечным звеньям двигаться поступательно (кисть боксера при вращательных движениях в плечевом и локтевом суставах; туловище бегуна при отталкивании ногой). Пример возвратно-поступательного движения — работа пилой, напильником. В этих случаях угловые скорости противоположно направленных движений одинаковы (пара скоростей).
Наконец, в шаровидных суставах возможно сложное круговое движение, когда продольная ось звена описывает коническую поверхность. При этом согласуются два движения: самой продольной оси и звена вокруг этой оси. Только такое конусообразное движение и может выполняться без обязательных возвратных движений.
В возвратных движениях имеется критическая точка, в которой происходит смена направления движения (амортизации на отталкивание — в беге, заноса весла на гребковое движение — в гребле, замаха ракеткой на ударное движение — в теннисе). В каждом суставе направления и размах движений ограничены. Значит, звено в суставе может занимать не любое, а лишь анатомически возможное положение. Однако из бесчисленного множества возможных движений только малая часть вызвана потребностями человека и отвечает энергетическим требованиям. Эти движения отобраны и закрепились в человеческой практике как наиболее рациональные, стали привычными к общеупотребительными.
Степени свободы и связи движений
Если у физического тела нет никаких ограничений (связей), оно может двигаться в пространстве во всех трех измерениях, т. е. относительно трех взаимно перпендикулярных осей (поступательно), а также вокруг них (вращательно). Следовательно, у такого тела шесть степеней свободы движения (рис. 1(в)).
Каждая связь уменьшает число степеней свободы. Зафиксировав одну точку свободного тела, сделав его звеном пары, сразу лишают его трех степеней свободы — возможных линейных перемещений вдоль трех основных осей координат. Примером может служить шаровидный сустав — тазобедренный, в котором три степени свободы из шести (возможно вращение относительно трех осей) (рис. 1 (г)). Закрепление двух точек звена говорит о наличии оси, проходящей через эти точки. В таком случае остается одна степень свободы. Пример подобного ограничения — одноосный сустав, например межфаланговый (рис. 1 (д)). Закрепление третьей точки, не лежащей на этой оси, полностью лишает звено свободы движений (рис. 10 (ё)). Такое соединение к суставам не относится. В анатомии выделяют также двуосные суставы; они имеют вторую степень свободы вследствие неконгруэнтности (неполного соответствия по форме) суставных поверхностей (суставы лучезапястный и пястнофаланговый 1-го пальца).
Почти во всех суставах (кроме межфаланговых, лучелоктевых и атлантоосевого) степеней свободы больше, чем одна. Поэтому устройство пассивного аппарата в них обусловливает неопределенность движений, множество возможностей движений («неполносвязный механизм»). Управляющие воздействия мышц вызывают дополнительные связи и оставляют для движения только одну степень свободы («полносвязный механизм»). Так обеспечивается одна-единственная возможность движений — именно та, которая требуется.
Каждая биомеханическая пара многоосного сустава заключает в себе возможности многих механизмов (А. А. Ухтомский). Из множества возможностей при помощи управляющих воздействий мышц выделяют заданное управляемое движение. Биокинематические соединения богаче возможностями, чем кинематические соединения в технических механизмах, но управление ими сложнее.
Следовательно, множество степеней свободы кинематической пары в многоосных суставах требует для выполнения каждого определенного движения:
а) выбора необходимой траектории,
б) управления движением по траектории (направлением и величиной скорости) и
в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории.
Звенья тела как рычаги и маятники
Разбиение тела человека на звенья позволяет представить эти звенья как механические рычаги и маятники, потому что все эти звенья имеют точки соединения, которые можно рассматривать либо как точки опоры (для рычага), либо как точки отвеса (для маятника).
Рычаг характеризуется расстоянием между точкой приложения силы и точкой вращения. Рычаги бывают первого и второго рода.
Рычаг первого рода или рычаг равновесия состоит только из одного звена. Пример – крепление черепа к позвоночнику.
Рычаг второго рода характеризуется наличием двух звеньев. Условно можно выделить рычаг скорости и рычаг силы в зависимости от того, что преобладает в их действиях. Рычаг скорости дает выигрыш в скорости при совершенствовании работы. Пример – локтевой сустав с грузом на ладони. Рычаг силы дает выигрыш в силе. Пример – стопа на пальцах.
Поскольку тело человека выполняет свои движения в трехмерном пространстве, то его звенья характеризуются степенями свободы, т.е. возможностью совершать поступательные и вращательные движения во всех измерениях. Если звено закреплено в одной точке, то оно способно совершать вращательные движения и мы можем сказать, что оно имеет три степени свободы.
Закрепление звена приводит к образованию связи, т.е. связанному движению закрепленного звена с точкой закрепления.
Поскольку руки и ноги человека могут совершать колебательные движения, то к механике их движения применимы те же формулы, что и для простых механических маятников. Основные вывод их них – собственная частота колебаний не зависит от массы качающегося тела, но зависит от его длины (при увеличении длины частота колебаний уменьшается).
Делая частоту шагов при ходьбе или беге или гребков при плавании или гребле резонансной (т.е. близкой к собственной частоте колебаний руки или ноги), удается минимизировать затраты энергии. При наиболее экономичном сочетании частоты и длины шагов или гребков человек демонстрирует существенный рост работоспособности. Простой пример: при беге высокий спортсмен имеет большую длину шага и меньшую частоту шагов, чем более низкорослый спортсмен, при равной с ним скорости передвижения.
Рычаги в биокинематических цепях
Костные рычаги — звенья тела, подвижно соединенные в суставах под действием приложенных сил, — могут либо сохранять свое положение, либо изменять его. Они служат для передачи движения и работы на расстояние.
Все силы, приложенные к звену как рычагу, можно объединить в две группы: а) силы или их составляющие, лежащие в плоскости оси рычага (они не могут повлиять на движение вокруг этой оси) и б) силы или их составляющие, лежащие в плоскости, перпендикулярной к оси рычага (они могут влиять на движение вокруг оси в двух противоположных направлениях). Рассматривая действие сил на рычаг, учитывают только силы, направленные по ходу движения (движущие) и против него (тормозящие).
Когда группы сил приложены по обе стороны от оси (точки опоры) рычага, его называют двуплечим или рычагом первого рода (рис. 2 (а)), а когда по одну сторону — одноплечим, или рычагом второго рода (рис. 2 (6)). Для разных мышц, прикрепленных в разных местах костного звена, рычаг может быть разного рода. Так, относительно своих сгибателей предплечье (при работе против веса груза) представляет собой одноплечий рычаг; относительно же мышц-разгибателей (при удержании груза над головой) — двуплечий рычаг.
При преодолевающих движениях сила сокращающихся мышц (их равнодействующая тяга) — движущая сила, при уступающих движениях сила растягиваемых мышц (их равнодействующая тяга) — тормозящая. Силы сопротивления направлены противоположно действию мышц.
Каждый рычаг имеет следующие элементы (рис. 2 (в)):
а) точку опоры (0),
б) точки приложения сил,
в) плечи рычага (расстояния от точки опоры до точек приложения сил — l),
г) плечи сил (расстояния от точки опоры до линий действия сил — опущенные на них перпендикуляры— d).
Мерой действия силы на рычаг служит ее момент относительно точки опоры (произведение силы на ее плечо).
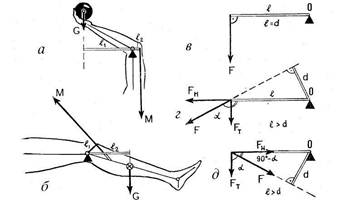
Рис. 2. Костные рычаги: а — двуплечий, 6 — одноплечий; вращающая составляющая (Ft) и укрепляющая (FH) силы при углах ее приложения: в — в прямом, г — тупом, д — остром
Механические свойства костей и суставов
Механические свойства костей определяются их разнообразными функциями; кроме двигательной, они выполняют защитную и опорную функции. Так кости черепа и грудной клетки защищают внутренние органы, а кости позвоночника и конечностей выполняют опорную функцию.
Выделяют 4 вида механического воздействия на кость: растяжение, сжатие, изгиб и кручение.
Установлено, что прочность кости на растяжение почти равна прочности чугуна. При сжатии прочность костей еще выше. Самая массивная кость – большеберцовая (основная кость бедра) выдерживает силу сжатия в 16-18 кН.
Менее прочны кости на изгиб и кручение. Однако регулярные тренировки приводят к гипертрофии костей. Так, у штангистов утолщаются кости ног и позвоночника, у теннисистов – кости предплечья и т.п.
Механические свойства суставов зависят от их строения. Суставная поверхность смачивается синовиальной жидкостью, которую хранит суставная сумка. Синовиальная жидкость обеспечивает уменьшение трения в суставе примерно в 20 раз. При этом при снижении нагрузки на сустав жидкость поглощается губчатыми образованиями сустава, а при увеличении нагрузки она выжимается для смачивания поверхности сустава и уменьшения коэффициента трения.
Прочность суставов, как и прочность костей, небеспредельна. Так, давление в суставном хряще не должно превышать 350 Н/см2. При более высоком давлении прекращается смазка суставного хряща и увеличивается опасность его механического стирания.
Биомеханические особенности костной системы
Двигательная деятельность человека требует согласованной работы организма в целом, но главная роль при этом принадлежит двигательному аппарату. С механической точки зрения двигательный аппарат человека представляет собой механизм, состоящий из сложной системы рычагов, приводимых в действие мышцами. Однако при изучении движений человека и причин, их вызывающих, было бы неправильно ограничиваться только представлениями механики. Для того, чтобы понять устройство двигательного аппарата и принцип его действия, необходимо иметь в виду биологическую природу "механизмов" человеческого тела. Анализ деятельности двигательного аппарата с биологической точки зрения позволяет вскрыть своеобразие устройства и принципа действия "живых механизмов". Таким образом, изучая движения человека, необходимо хорошо знать, как устроен его опорно-двигательный аппарат с точки зрения биомеханики. Это означает, что следует ясно представлять себе принципы строения его пассивной (кости и их соединения) и активной (мышечная система) частей. В отличие от анатомии, которая изучает все детали строения тела, для биомеханики важно выявить именно те особенности строения, от которых зависят свойства органов опоры и движения, а также их участие в выполнении двигательной функции.
В биомеханическом исследовании невозможно учесть строение и функции тела во всех их особенностях. Для изучения движений строят модель тела — биомеханическую систему. Она обладает основными свойствами, существенными для выполнения двигательной функции, и не включает в себя множество частных деталей. Таким образом, биомеханическая система — это упрощенная копия, модель тела человека, на которой можно изучать закономерности движений.
Двигательную часть человека составляют костная и мышечная системы.
Основным свойством, которым обладает костная система, является свойство упругости.
Упругость - способность противодействовать нагрузкам.
Нагрузками называются силы, приложенные к телу и в совокупности вызывающие его деформацию. Различают нагрузки, вызывающие растяжение, сжатие, изгиб и кручение.
Нагрузки, обуславливающие растяжение, возникают, например, при висах или во время удержания груза в опущенных руках.
Нагрузки, создающие сжатие костей, встречаются чаще всего при вертикальном положении тела на опоре. В этом случае на скелет действуют, с одной стороны, силы тяжести тела и вес внешних отягощений, а с другой - давление опоры.
Нагрузки, вызывающие изгиб, обычно встречаются, когда кости выполняют роль рычагов. В этих случаях приложенные к ним силы мышц и силы сопротивления направлены поперек костей и вызывают изгиб.
Нагрузки, обуславливающие кручение, чаще всего встречаются при вращательных движениях звена вокруг продольной оси.
Соединение звеньев. Соединения костных звеньев обусловливают многообразие возможностей движений. От способа соединения и участия мышц в движениях зависит их направление и размах (пространственная форма движений).
Степени свободы движения. Суставы, связывая в единое целое части тела, сохраняют возможности для их движений. Если часть тела может двигаться только по одной траектории, причем возможности движений по всем остальным траекториям ограничиваются связями, в механике говорят об одной степени свободы, или о степени подвижности.
Совершенно свободное тело имеет шесть степеней свободы. Оно может вращаться вокруг трех основных взаимно перпендикулярных осей, а также двигаться вдоль каждой из этих осей.
Если закрепить тело в одной точке, то у него остается только три степени свободы: оно может вращаться вокруг этой точки в трех основных направлениях (плоскостях). При закреплении тела еще в одной точке оно как бы насаживается на ось, соединяющую обе данные точки. В этом случае сохраняется лишь одна степень свободы: тело может вращаться лишь вокруг оси, проходящей через обе закрепленные точки.
Если же закрепить тело и в третьей точке, не лежащей на одной прямой с остальными двумя точками, то оно потеряет последнюю степень свободы: будет закреплено неподвижно.
Возможности движений отдельных точек тела при закреплении тела несколько иные. При одной закрепленной точке любая точка этого тела имеет только две степени свободы, т.е. она может двигаться только в двух направлениях по шаровой поверхности. При двух закрепленных точках тела у любой его точки будет лишь одна степень свободы, т.е. возможна одна траектория движения. Само собой разумеется, что у тела, закрепленного в трех точках, нет ни одной степени свободы. У совершенно свободного тела любая точка имеет всего три степени свободы, т.е. может двигаться в любом из трех направлений трехмерного пространства.
Понятие о степенях свободы поможет разобраться в вопросе о подвижности частей тела. Несколько подвижно соединенных звеньев составляет кинематические пары и цепи.
В каждом соединении незамкнутой цепи возможны изолированные движения. Они геометрически независимы от движений в других соединениях (если не учитывать взаимодействия мышц). Например, свободные конечности, когда их концевые звенья свободны, представляют незамкнутые цепи. Замкнутыми кинематическими цепями в теле человека являются, например, грудина, ребро, позвоночник, ребро и снова грудина.
Такие замкнутые цепи разомкнуть невозможно. Незамкнутые могут замыкаться, причем часто через опору. В сложной пирамиде, составленной несколькими акробатами, образуются даже своего рода "сети" (в плоскости) и "решетки" (в пространстве) с очень сложной взаимной зависимостью движений звеньев.
В замкнутой или замкнувшейся цепи невозможно изолированное движение, т.е. движение в одиночном сочленении. Так, сгибая и выпрямляя ноги в выпаде, можно убедиться в том, что движение в любом суставе непременно вызывает движения и в других.
Таким образом, движения в незамкнутых цепях характеризуются относительной независимостью звеньев. В замкнутых же, а также замкнувшихся цепях движения одних звеньев влияют на движения даже отдаленных звеньев (помогают или мешают).
В замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых.
В открытой кинематической цепи подвижность каждого следующего звена равна его собственной подвижности плюс подвижность предыдущих звеньев. Так, если у бедра три степени свободы, а у голени относительно бедра еще две степени, то голень относительно таза имеет пять степеней свободы. Наибольшие возможности движений - у конечных звеньев цепи. Но больше шести степеней свободы конечное звено цепи иметь не может. Если же при суммировании степеней свободы получается, что конечное звено имеет их больше шести, то это только значит, что при фиксировании этого звена промежуточные звенья сохраняют степени свободы на шесть степеней меньше. Так, кисть имеет относительно лопатки семь степеней свободы (плечевой сустав - 3, плюс локтевой - 2, плюс лучезапястный - 2) . Если положить кисть на стол, то плечо и предплечье сохраняют 7-6=1 степень свободы. Они смогут двигаться лишь по одной траектории, вокруг оси, соединяющей плечевой и лучезапястный суставы.
Кости, соединенные подвижно, образуют основу биокинематических цепей. Приложенные к ним силы (мышечные тяги и др.) действуют на звенья биокинематической цепи, как на рычаги. Это позволяет передавать действие силы по цепям, а также изменять эффект приложения сил. Таким образом, рычаг как простейший механизм служит для передачи движения и силы на расстояние.
Различают рычаги первого рода (двуплечий) и второго рода (одноплечий). Первый характеризуется тем, что две группы сил приложены по обе стороны от оси (точки опоры) рычага, а во втором случае - по одну сторону.
Вне зависимости от вида рычага в каждом из них выделяют:
1) точку опоры;
2) точку приложения сил;
3) плечи рычага (расстояние от точки опоры до места приложения сил);
4) плечи сил (длина перпендикуляра, опущенного из точки опоры на линию действия силы).
Мерой действия силы на рычаг служит ее момент относительно точки опоры. Поэтому для равновесия либо равномерного вращательного движения звена как рычага необходимо, чтобы противоположно направленные моменты сил относительно оси рычага были равны. Для ускорения (торможения) звена один момент силы должен быть больше другого. Так, момент движущих сил, преобладая над моментом тормозящих сил, придает звену положительное ускорение (в сторону движения). Если же большим оказывается момент тормозящих сил, то он вызывает торможение звена.
С помощью рычага можно выиграть в силе. Для этого нужно действовать мышечной силой на более длинное плечо. Согласно "золотому правилу механики", выигрывая в силе, одновременно проигрываем в пути и в скорости. Наоборот, если действовать мышечной силой на короткое плечо, то можно выиграть в пути и в скорости за счет проигрыша в силе.
В большинстве случаев мышцы прикрепляются недалеко от сустава и подходят к кости под острым углом. Поэтому плечо силы тяги мышцы, как правило, небольшое. Обычно плечо силы тяги мышц меньше плеча силы сопротивления, и, следовательно, при работе мышцы получается проигрыш в силе и выигрыш в пути и в скорости движения. Для некоторого увеличения плеча силы тяги мышц большое значение имеют костные выступы, бугры, сесамовидные косточки, к которым мышцы прикрепляются или через которые они переходят. Выступы, бугры, сесамовидные косточки увеличивают угол подхода мышцы к кости как к рычагу, тем самым увеличивают плечо силы тяги мышцы и момент вращения мышечной силы. Таким образом, можно выделить две причины проигрыша в силе. Первая - прикрепление мышцы вблизи сустава, вторая - тяга мышцы вдоль кости под очень острым (или тупым) углом.
Можно указать еще и на третью причину некоторых потерь в силе мышц. При больших нагрузках напрягаются все мышцы, окружающие сустав. Мышцы-антагонисты, создавая моменты сил, которые направлены противоположно, полезной работы не производят, а энергию затрачивают. Но в конечном счете в этом есть определенный смысл: хотя и возникают потери энергии, сустав во время больших нагрузок получает укрепление напряжением мышц, которые его окружают.
В связи с особенностями приложения мышечных тяг к костным рычагам необходимы весьма значительные напряжения мышц для выполнения не только силовых, но и скоростных движении. При этом следует помнить, что входящие в биокинематические цепи звенья тела образуют системы составных рычагов, в которых "золотое правило" механики проявляется намного сложнее, чем в простых одиночных рычагах.
Список использованной литературы
1. Донской Д.Д. Биомеханика: учебник для институтов физической культуры, - М., 1979
2. Ламаш Б.Е. Лекции по биомеханике, - М., 2005
3. Уткин В.Л. Биомеханика физических упражнений, - М., 2002
4. http://www.gled.myorel.ru/page/1/113.html