Радиоуправление летательными аппаратами
Работы по использованию средств радиотехники для управления на расстоянии, т.е. работы по радиоуправлению, начались еще до первой мировой войны. Однако до второй мировой войны радиоуправление практического применения, по существу, не получило. Положение резко изменилось, начиная с 40-х годов. Особенно большие успехи были достигнуты в области управления беспилотными летательными аппаратами. Причиной этого были два следующих обстоятельства:
1)Успешное использование созданного к этому времени реактивного оружия во многих случаях оказалось возможным только на базе широкого применения радиоуправления.
2)Создание к 40-м годам достаточно эффективных средств визирования (радиолокаторов) управляемых объектов и целей.
Следует отметить, что разработка беспилотных летательных аппаратов несколько опередила необходимых для управления средств радиолокации. Поэтому первые управляемые по радио беспилотные летательные аппараты, или наводились на неподвижную цель с неподвижного пункта управления, или управлялись с помощью оптических средств.
Применение радиоуправления связанно в общем случае с наличием радиотехнических средств визирования для определения параметров движения целей и снарядов, которые часто дополняются радиотехническими средствами передачи команд с пункта управления на снаряд и иногда различных данных со снаряда на пункт управления. Управление по радио может быть нарушено организацией искусственных радиопомех.
Общая характеристика систем управления
Радиоуправлением называется управление с помощью радиосредств любыми процессами и объектами. По количеству решаемых задач управление может быть одноцелевым или многоцелевым, т. е. обеспечивающим решение не одной, а двух или более задач. Например, система управления совокупностью искусственных спутников Земли (ИСЗ) может проектироваться одновременно для следующих двух целей:
1. Обеспечение движения совокупности ИСЗ по заданным траекториям (необходимым, например, для осуществления глобальной радиосвязи).
2. Осуществление различных переключений аппаратуры на борту ИСЗ, необходимых для выполнения этими ИСЗ определенных задач.
По количеству одновременно управляемых объектов управление может быть однообъектным или многообъектным. Упомянутая выше система управления совокупностью ИСЗ является многообъектной, так как должна осуществлять управление несколькими ИСЗ.
По количеству пунктов управления (командных пунктов), из которых может осуществляться управление данным объектом, это управление может быть однопунктным или многопунктным. Примером многопунктного (двухпунктного) управления является управление космическим кораблем, которое может осуществляться как космонавтом (т. е. с бортового пункта управления), так и с наземного пункта управления.
Следует также различать обычное (одноступенчатое) и иерархическое (многоступенчатое) управление. В иерархических (многоступенчатых) системах управления команды управления могут формироваться не одним, а несколькими людьми или управляющими устройствами и притом в иерархическом (по отношению к управляемому объекту) порядке. Примером иерархического (многоступенчатого) управления является управление движением пассажирского самолета. На первой (низшей) ступени управление движением самолета осуществляется пилотом, на второй (более высокой) ступени — командиром экипажа, на третьей ступени — диспетчером наземного пункта управления и т. п. Очевидно, иерархическое управление может быть как многопунктным, так и однопунктным. Например, если система управления межпланетным космическим кораблем будет предусматривать возможность управления этим кораблем только с борта этого корабля, но двумя лицами — космонавтом-пилотом и космонавтом-командиром корабля, то управление таким кораблем будет однопунктным, но иерархическим (двухступенчатым). Очевидно также, что многопунктное управление может быть как иерархическим, так и обычным. Например, если при старте автоматической межпланетной станции управление ее движением будет производиться из одного командного пункта, а при посадке — из другого, то такое управление будет многопунктным, но не иерархическим.
Общая функциональная схема одноцелевой системы управления
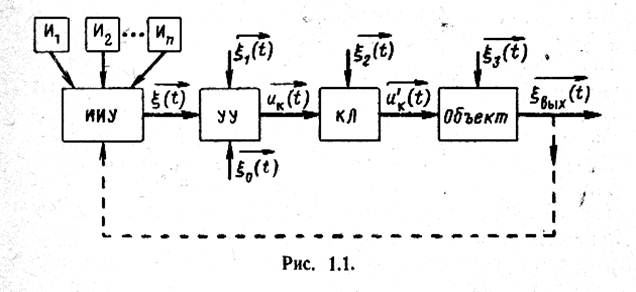
содержащая всего один командный пункт с обычным (неиерархическим) управлением приведена на рис. 1.1 и состоит из информационно-измерительного устройства (ИИУ), управляющего устройства (УУ), командной линии (КЛ) и управляемого объекта. Информационно-измерительное устройство
извлекает (собирает) информацию из внешних источников И1, И2, . . ., Иn и
информацию о состоянии управляемого объекта (при наличии канала
обратной связи). Управляющее устройство вырабатывает команды управления
![]()
uk (t) на основе поступающей на его входы текущей (рабочей) информации
![]()
![]() ξ(t) и начальной (априорной) информации ξ0(t) . Далее команды передаются по командной линии на управляемый объект. Вследствие возникающих при
ξ(t) и начальной (априорной) информации ξ0(t) . Далее команды передаются по командной линии на управляемый объект. Вследствие возникающих при
![]()
этом искажений, команды u’k (t) , поступающие на объект, могут несколько
![]() отличаться от переданных команд uk (t). В тех случаях, когда управляющее устройство расположено в непосредственной близости к объекту, командная
отличаться от переданных команд uk (t). В тех случаях, когда управляющее устройство расположено в непосредственной близости к объекту, командная
линия отсутствует.
![]()
![]()
![]()
![]() На рис 1.1 ξ1(t) , ξ2(t) , ξ3(t) ― мешающее воздействие (возмущение), появляющиеся соответственно в управляющем устройстве, командной линии и управляемом объекте. Информационно-измерительное устройство (ИИУ) в общем случае состоит из устройств извлечения и передачи информации. Устройства извлечения информации собирают всю текущую информацию, необходимую для обеспечения управления. Например, при наведении ракеты на цель они выдают информацию о текущем положении цели и ракеты (объекта) или об отклонении ракеты от требуемой траектории. Если устройства извлечения информации и управляющее устройство расположены на значительном удалении друг от друга, то информационно-измерительное устройство содержит также соответствующие линии передачи информации. В противном случае эти линии передачи отсутствуют, и информационно-измерительное устройство называется обычно измерительным устройством и представляет собой совокупность нескольких чувствительных элементов (датчиков).
На рис 1.1 ξ1(t) , ξ2(t) , ξ3(t) ― мешающее воздействие (возмущение), появляющиеся соответственно в управляющем устройстве, командной линии и управляемом объекте. Информационно-измерительное устройство (ИИУ) в общем случае состоит из устройств извлечения и передачи информации. Устройства извлечения информации собирают всю текущую информацию, необходимую для обеспечения управления. Например, при наведении ракеты на цель они выдают информацию о текущем положении цели и ракеты (объекта) или об отклонении ракеты от требуемой траектории. Если устройства извлечения информации и управляющее устройство расположены на значительном удалении друг от друга, то информационно-измерительное устройство содержит также соответствующие линии передачи информации. В противном случае эти линии передачи отсутствуют, и информационно-измерительное устройство называется обычно измерительным устройством и представляет собой совокупность нескольких чувствительных элементов (датчиков).
Если команды uk (t) вырабатываются с учетом текущей информации о состоянии управляемого объекта, т. е. существует обратная связь с выхода объекта на вход управляющего устройства (как это изображено пунктиром на рис. 1.1), то система управления называется, замкнутой. Если такая обратная связь отсутствует, то система управления называется разомкнутой. В дальнейшем речь будет идти в основном о замкнутых системах управления, так как они позволяют, как правило, получить более высокое качество управления и находят наибольшее применение. Кроме того, именно в замкнутых системах управления наиболее сильно проявляются особенности работы радиосредств, связанные с наличием взаимодействия как между отдельными радиосредствами, так и с остальными (нерадиотехническими) звеньями системы управления. В системах управления радиосредства находят широкое применение как в составе информационно-измерительных устройств, так и в качестве командных линий, называемых в этом случае командными радиолиниями (КРЛ).
В составе информационно-измерительных устройств радиосредства применяются как для извлечения информации (радиолокационные, телевизионные и другие устройства), так и для передачи информации, т. е. в качестве радиолиний передачи данных.
В зависимости от степени участия человека управление может быть автоматическим, неавтоматическим или универсальным. При автоматическом управлении человек не принимает непосредственного участия в процессе управления и его функции сводятся лишь к контролю за исправностью аппаратуры, и в случае необходимости, к замене неисправной аппаратуры или ее ремонту. При неавтоматическом (например, ручном) управлении человек принимает в процессе управления непосредственное участие и называется оператором. При универсальном управлении имеется возможность как автоматического, так и неавтоматического управления. При неавтоматическом управлении разнообразная информация, необходимая человеку-оператору для эффективного управления, обычно извлекается и предварительно обрабатывается в ряде информационно-измерительных автоматических устройств. При этом неавтоматическое управление часто называется автоматизированным управлением.
По степени приспосабливаемости к внешним условиям системы управления делят на обычные и адаптивные. В обычных системах приспособление (адаптация) отсутствует или имеется лишь в небольшой степени. В адаптивных системах приспособление играет существенную роль. Обычно к адаптивным системам относят самоприспосабливающиеся, самонастраивающиеся, самообучающиеся и самоорганизующиеся системы. Самонастраивающимися системы― системы в которых структура (принципы построения) системы в процессе управления не изменяется, а изменяются (приспосабливаются, настраиваются) лишь отдельные параметры этой структуры (коэффициенты усиления, полосы пропускания, частоты настройки и т. п.). Системы более высокого класса, в которых оптимизироваться (приспосабливаться) в процессе управления могут не только параметры системы, но и ее структура.
По характеру протекания процессов в контуре управления (рис. 1.1) управление может быть непрерывным, квазинепрерывным, импульсным и импульсно-корректирующим. При непрерывном управлении процессы во всех звеньях контура управления являются непрерывными функциями времени. При квазинепрерывном управлении процессы в некоторых звеньях (обычно в измерительных) имеют импульсный характер, но импульсы следуют столь
![]()
часто, что выходной вектор, ξвых(t) (рис. 1.1) изменяется во времени практически так же, как при непрерывном управлении.
Если импульсный характер процессов, протекающих в отдельных звеньях контура управления, необходимо учитывать яри рассмотрении действия не только отдельных звеньев, но и системы в целом, управление называется импульсным или импульсно-корректирующим. При этом отличие импульсного управления от импульсно-корректирующего состоит в том, что в первом случае импульсы в различных частях системы следуют синхронно и с постоянным периодом повторения (или несколькими, но кратными периодами повторения). Во втором случае (при импульсно-корректирующем управлении) управление сводится к выработке и исполнению сравнительно небольшого числа корректирующих импульсов, и синхронизация следования импульсов в различных звеньях системы может отсутствовать.
В состав системы радиоуправления кроме радиосредств может входить большое количество другой аппаратуры — управляемый объект (аппарат), управляющее устройство (включая исполнительные механизмы), различные нерадиотехиические датчики, программно-временные устройства и т. п. При этом в ряде случаев радиосредства по своему весу, габаритам и стоимости могут составлять лишь небольшую долю всей системы управления. Но даже в таких случаях радиоинженерам, разрабатывающим и эксплуатирующим радиосредства, обычно необходимо учитывать в той или иной степени связи между радиосредствами и остальными частями системы управления. Эти связи можно подразделить на функциональные, конструктивные и динамические.
Функциональные связи обусловлены тем, что все устройства, входящие в систему, предназначены для выполнения общей задачи. При этом обычно выполнение этой общей задачи может быть достигнуто при различных вариантах распределения требований между отдельными устройствами. Например, одна и та же вероятность поражения цели управляемым снарядом может быть достигнута при меньших требованиях точности наведения снаряда, если повысить требования к эффективности боевого заряда; в ряде случаев можно обеспечить ту же помехоустойчивость системы при меньшей мощности радиопередающего устройства, если повысить требования к радиоприемному устройству и т. д.
Конструктивные связи обусловлены тем, что обычно по условиям задачи система в целом или ее отдельные крупные части должны представлять в конструктивном отношении единое целое, например размещаться внутри корпуса управляемого снаряда.
Динамические связи проявляются в том, что процессы, протекающие в различных частях системы управления во время ее работы, взаимосвязаны. В разомкнутых системах управления эти связи проявляются в том, что выходная реакция каждого предыдущего блока является входным воздействием для последующего; кроме того, часто приходится учитывать входное сопротивление последующего блока. В замкнутых системах управления, кроме того, обязательно существует зависимость процессов на входе системы от процессов на ее выходе.
Общая характеристика радиоуправления летательными аппаратами
Из всего многообразия летательных аппаратов мы выделим лишь следующие их виды, наиболее характерные с точки зрения применяемых методов и средств управления:
1) Реактивные снаряды (ракеты) ближнего действия — ракеты «Земля — Воздух» (зенитные), «Воздух — Воздух», «Воздух — Земля» (или Воздух—Море) и «Земля — Земля».
2) Баллистические ракеты дальнего действия и ракеты-носители космических аппаратов.
3) Космические аппараты (КА) — искусственные спутники Земли (ИСЗ), космические корабли, межпланетные автоматические станции и т. д.
4) Самолеты и вертолеты.
Ракеты (реактивные снаряды) ближнего действия являются средствами поражения целей. При этом процесс радиоуправления состоит из трех основных этапов:
1. Управление пуском ракеты.
2. Управление полетом ракеты.
3. Управление подрывом боевого заряда ракеты.
Управление пуском должно обеспечить пуск ракеты в наивыгоднейший момент времени. Если пуск ракеты производится с поворотного наклонного лафета, то управление пуском должно обеспечить и необходимую ориентацию лафета. Управление пуском осуществляется на КП (командном пункте) с помощью радиолокационных устройств, расположенных на КП, и предварительных данных о координатах цели и параметрах ее движения, поступающих по линиям связи с центра обработки данных радиолокационного поля (т. е. совокупности радиолокационных средств некоторого района). Управление полетом обеспечивает наведение ракеты на цель с точностью, достаточной для надежного поражения цели. Оно осуществляется обычно с помощью радиосредств, расположенных как на КП, так и на борту ракеты, и включает радиолокационные устройства и радиолинии передачи информации с КП на ракету и (или) с ракеты на КП. Управление подрывом боевого заряда ракеты должно обеспечить подрыв в наивыгоднейший момент времени и осуществляется обычно радиовзрывателем, расположенным на борту ракеты.
Баллистические ракеты дальнего действия (БР) предназначены для поражения неподвижных целей, удаленных от КП на несколько тысяч или более километров. При управлении такими ракетами момент пуска обычно не играет существенного значения, но зато весьма важно обеспечить выключение двигателя ракеты в момент, обеспечивающий попадание в цель.
Ракеты-носители космических аппаратов предназначены для вывода на заданную орбиту искусственных спутников Земли, космических кораблей и других космических аппаратов. Ракеты-носители КА, как и баллистические ракеты дальнего действия, обычно делаются многоступенчатыми (обычно двух- или трехступенчатыми). Управление ракетами-носителями КА имеет много общего с управлением баллистическими ракетами дальнего действия, так как в обоих случаях основной задачей управления является выключение в наивыгоднейший момент времени двигателя последней ступени ракеты. В момент выключения двигателя соотношение между координатами и составляющими вектора скорости ракеты должно быть таким, чтобы обеспечить попадание ракеты в цель (в случае баллистической ракеты) или вывод космического аппарата на заданную орбиту (в случае запуска КА).
Космические аппараты в зависимости от степени удаления их от Земли делят на аппараты ближнего космоса (околоземные), «среднего космоса» (лунные) и дальнего космоса (межпланетные). Основными типами околоземных КА являются ИСЗ (связные, навигационные, исследовательские и др.) и околоземные космические корабля. При управлении некоторыми видами ИСЗ требуется весьма высокая точность вывода их на заданную орбиту и удержания на этой орбите в течение длительного времени. Кроме того, как уже отмечалось выше, часто требуется производить согласованное управление совокупностью из нескольких спутников. При управлении космическими кораблями необходимо производить не только вывод корабля на орбиту, но и его посадку на Землю. В ряде случаев требуется, кроме того, производить автоматическую или полуавтоматическую стыковку на орбите двух или более космических аппаратов и осуществлять различные их маневры.
Еще более сложны и разнообразны задачи управления лунными и межпланетными КА. Например, при осуществлении полета космического корабля на Луну и обратно может потребоваться последовательное выполнение следующих основных операций: запуск корабля с несколькими космонавтами на околоземную орбиту и корректировка этой орбиты; выход с околоземной орбиты на орбиту, обеспечивающую сближение с Луной; переход с этой орбиты на окололунную орбиту; разделение корабля на два отсека — лунный и основной; спуск лунного отсека на поверхность Луны; обратный старт лунного отсека с поверхности Луны и стыковка его с вращающимся на окололунной орбите основным отсеком; выход космического корабля с окололунной орбиты на орбиту, обеспечивающую сближение с Землей; переход с этой орбиты на околоземную орбиту; спуск с околоземной орбиты и посадка на поверхность Земли.
При управлении самолетами, особенно военного назначения, также приходится решать целый комплекс разнообразных задач — взлет, выведение в район цели, пуск против цели управляемого снаряда (ракеты) и управление этим снарядом, предотвращение столкновений с другими самолётами, возвращение на аэродром, посадку и другие. При управлении летательными аппаратами часто приходится, кроме того, решать задачи радиопротиводействия (создания помех радиосредствам противника) и огневого противодействия (например,
уничтожения радиолокаторов противника снарядами с пассивными головками самонаведения).
Из приведенного выше краткого обзора следует, что характер задач радиоуправления в большой мере зависит от вида управляемого аппарата и его назначения. Так, например, при управлении аппаратами невоенного назначения отпадают задачи радиопротиводействия и подрыва боевой части; при управлении снарядами отсутствует задача посадки летательного аппарата и т. п. Однако для большинства управляемых летательных аппаратов характерно наличие управления их движением. Это управление в общем случае заключается в управлении перемещениями центра масс аппарата и его поворотами вокруг центра масс, т. е. в управлении полетом и ориентацией. При этом управление ориентацией аппарата может требоваться как для обеспечения надлежащего управления его полетом, так и иметь самостоятельное значение (например, при необходимости обеспечить определенное положение корпуса летательного аппарата относительно Земли).
Радиоуправление движением летательных аппаратов и морских судов часто называют также радионавигацией.
Термин навигация возник впервые применительно к морским судам и под радионавигацией понималось вначале вождение с помощью радиосредств морских судов. С появлением самолетов термины «навигация» и «радионавигация» были распространены и на вождение самолетов. В связи с появлением космических кораблей эти термины были распространены и на вождение космических кораблей. Поэтому в настоящее время под радионавигацией понимают обычно вождение с помощью радиосредств морских, воздушных и космических кораблей. Для всех этих управляемых объектов характерно наличие на борту объекта человека (пилота), который может принимать непосредственное участие в управлении.
Термин радиоуправление, наоборот, начал впервые широко использоваться лишь применительно к управлению по радио беспилотными объектами — снарядами. В дальнейшем, в соответствии сразвитием техники управления и кибернетики, существенно расширившей понятие «управление», термин радиоуправление начал применяться не только к беспилотным, но и к пилотируемым аппаратам.
Следует отметить, что в последние годы развитие техники управления движением летательных аппаратов привело к тому, что оба термина — радиоуправление и радионавигация в значительной мере утратили свой четкий смысл. Действительно, еще сравнительно недавно все системы управления и навигации можно было достаточно четко разделить на два класса — такие, в которых радиосредства не применяются для управления, и такие, в которых эти средства применяются. При этом, как правило, в тех системах управления, в которых радиосредства применялись, они играли доминирующую роль.
Для повышения качества управления применяется комбинация (комплексирование) радиосредств с другими, например инерциальными приборами управления. При этом классы систем, в которых радиосредства совершенно не применяются или, наоборот, являются доминирующими, постепенно сужаются. Особенно это относится к управлению пилотируемыми аппаратами, т. е. к навигации. Поэтому в настоящее время более правильно говорить не о радионавигации, а просто о навигации и под радионавигационными приборами (средствами) понимать не приборы для радионавигации, а радиоприборы для навигации. Соответственно в общем случае следует говорить не о средствах радиоуправления, а о радиосредствах (и других средствах) управления.
Для управления ориентацией летательных аппаратов радиосредства применяются в значительно меньшей мере, чем для управления их полетом.
Краткая характеристика способов управления полетом
Принципы рулевого управления
Управление полетом аппарата осуществляется изменением его
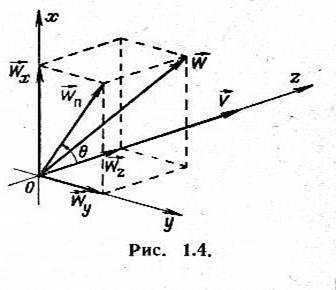
скорости Vт. е. сообщением аппарату ускорения W(рис. 1.4).
![]()
При этом изменение модуля скорости V осуществляется созданием
![]()
касательного ускорения Wz,а изменение направления вектора скорости
![]()
созданием поперечного ускорения Wп.Поперечное ускорение в декартовой
системе координат определяется своими составляющими Wxи Wy,ав полярной
![]()
системе координат модулем Wпи полярным углом θ. Управление величиной и
направлением ускорения Wосуществляется при помощи рулевых органов. Так
![]()
![]() как
как
W=F / m,
![]() где F— результирующая сила, приложенная к аппарату, имеющему массу m, то
где F— результирующая сила, приложенная к аппарату, имеющему массу m, то
управление ускорением Wдостигается изменением результирующей силы F.
Изменение силы Fосуществляется путем изменения силы тяги Т (создаваемой реактивным или каким-либо иным двигателем) и (или) результирующей
![]()
аэродинамической силы R(создаваемой воздушным потоком, обтекающим
![]() аппарат). Рулевые органы, управляющие силой R, называются воздушными рулями и позволяют получить эффективное управление лишь при полете с достаточной скоростью вдостаточно плотных слоях атмосферы.
аппарат). Рулевые органы, управляющие силой R, называются воздушными рулями и позволяют получить эффективное управление лишь при полете с достаточной скоростью вдостаточно плотных слоях атмосферы.
В некоторых случаях управление величиной скорости аппарата на основном участке его траектории не требуется и осуществляется управление лишь направлением полета. При этом достаточно иметь рулевые органы,
![]() управляющие лишь поперечным ускорением Wп.
управляющие лишь поперечным ускорением Wп.
Рулевое управление может быть декартовым, полярным или смешанным. При декартовом управлении рули высоты, поворота и "разгона — торможения"
управляют соответственно составляющими Wx,Wyи Wzполного ускорения Wв декартовой системе координат (рис. 1.4). При полярном рулевом управлении один из рулевых органов управляет модулем ускорения W(в некоторых системах этот рулевой орган может, кроме того, изменять направление вектора
![]()
Wна противоположное). Остальные рулевые органы обеспечивают требуемое
![]()
направление вектора W.
Примеры воздушного рулевого управления приведены на рис. 1.5 и 1.7.
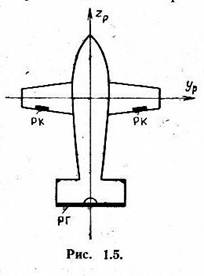
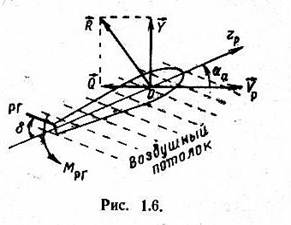
На рис. 1.5 приведена схема полярного рулевого управления. При отклонении руля глубины РГ вверх (на рис. 1.6 по часовой стрелке) набегающий на руль воздушный поток создает момент Мрг, поворачивающий корпус летательного аппарата вокруг оси yp против часовой стрелки (рис.1.6).
Поворот корпуса вокруг оси yp прекращается, когда вращающий момент, создаваемый воздушным потоком, обтекающим корпус (и действующий в данном случае по часовой стрелке), уравновешивает вращающий момент Мрг, создаваемый рулем глубины. При этом установившееся значение угла αa
![]()
между продольной осью ракеты и вектором ее скорости Vv(называемого углом атаки) оказывается примерно пропорциональным углу поворота руля δ (при небольших значениях углов).
![]()
Результирующая "аэродинамическая сила R, создаваемая набегающим на корпус летательного аппарата воздушным потоком, может быть разложена на
составляющие Y и Q. При этом величина нормальной составляющей Y, называемой подъемной силой, пропорциональна углу αa (при малых углах αa ).
Подъемная сила Yсоздает поперечное ускорение Wп, пропорциональное этой силе. Следовательно, отклонение руля глубины РГ на некоторый угол δ создает
![]()
в установившемся режиме поперечное ускорение Wп, модуль которого пропорционален углу отклонения руля. Если руль глубины повернется на такой же угол δ , но в противоположном направлении (т. е. против часовой стрелки), то корпус аппарата повернется также в противоположном направлении (по
![]()
![]() часовой стрелке), и подъемная сила Y, а следовательно, и ускорение Wпизменят свое направление на противоположное. При этом, если ось ур, жестко связанная
часовой стрелке), и подъемная сила Y, а следовательно, и ускорение Wпизменят свое направление на противоположное. При этом, если ось ур, жестко связанная
![]()
![]() с крылом аппарата, горизонтальна, то ускорение Wnвсегда будет расположено в вертикальной плоскости.
с крылом аппарата, горизонтальна, то ускорение Wnвсегда будет расположено в вертикальной плоскости.
Если требуется создать ускорение Wnв другой плоскости, то корпус аппарата поворачивается вокруг своей продольной оси zp на некоторый угол, называемый углом крена и создаваемый рулем крена РК. (При повороте руля крена набегающий на лопасти PK этого руля воздушный поток создает вращающий момент, поворачивающий корпус вокруг оси zР.)
Например, если с помощью рулей крена установится угол крена, равный 90°, то
![]()
отклонение руля глубины будет создавать ускорение Wпуже не в вертикальной, а в горизонтальной плоскости. Таким образом с помощью рулей глубины и крена может быть получено требуемое значение величины и направления
![]()
поперечного ускорения Wп аппарата.
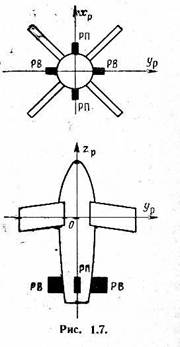
На рис. 1.7 приведена схема симметричного декартового рулевого управления. При этом составляющие поперечного ускорения в вертикальной и
горизонтальной плоскостях,Wxи Wy, создаются соответственно с помощью руля высоты РВ и руля поворота РП. Принцип действия каждого из этих рулей аналогичен описанному выше принципу действия руля глубины. При отклонении руля высоты корпус аппарата поворачивается вокруг оси yр и создается подъемная сила, а следовательно, и поперечное ускорение в вертикальной плоскости. Отклонение руля поворота РП вызывает поворот корпуса аппарата вокруг оси xРи создание подъемной силы и поперечного ускорения в горизонтальной плоскости.
При декартовом управлении руль крена выполняет лишь вспомогательную функцию—стабилизацию крена аппарата. При появлении какого-либо возмущающего момента, вызывающего крен аппарата (т. е. поворот его корпуса вокруг оси zР), руль крена создает противоположный момент, возвращающий корпус в исходное положение. Конструктивно руль крена может быть при этом совмещен с рулем высоты или рулем поворота.
При смешанном рулевом управлении, применяемом, например, в самолетах, в создании поперечного ускорения участвуют не два рулевых органа, а три — рули высоты, поворота и крена.
При отсутствии атмосферы или малой ее плотности (а также при малой скорости полета) управление полетом осуществляется изменением силы тяги двигателя (двигателей). Применяемые при этом схемы рулевого управления весьма разнообразны . Рассмотрим кратко наиболее типичную из них. В такой схеме модуль W требуемого ускорения создается одним двигателем, жестко связанным летательного аппарата и называемым главным или маршевым
![]() двигателем. Придание вектору Wтребуемого направления осуществляется путем соответствующей ориентации корпуса аппарата. При управлении баллистическими ракетами дальнего действия и ракетами-носителями космических аппаратов маршевый двигатель обычно работает в течение нескольких минут непрерывно, а затем выключается и сбрасывается. При этом в течение работы двигателя управление ориентацией может осуществляться с помощью газовых рулей. Эти рули изготавливаются из жаропрочных материалов и устанавливаются в струе газов, вытекающих из сопла маршевого двигателя (рис. 1.8).
двигателем. Придание вектору Wтребуемого направления осуществляется путем соответствующей ориентации корпуса аппарата. При управлении баллистическими ракетами дальнего действия и ракетами-носителями космических аппаратов маршевый двигатель обычно работает в течение нескольких минут непрерывно, а затем выключается и сбрасывается. При этом в течение работы двигателя управление ориентацией может осуществляться с помощью газовых рулей. Эти рули изготавливаются из жаропрочных материалов и устанавливаются в струе газов, вытекающих из сопла маршевого двигателя (рис. 1.8).
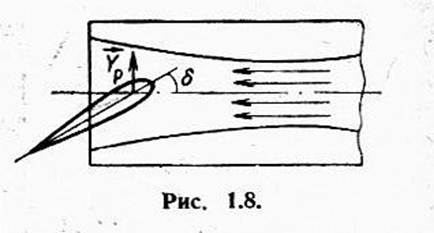
При повороте руля на некоторый угол δ , газовая струя создает
![]()
газодинамическую силу Yp, поворачивающую корпус ракеты вокруг ее центра масс.
При управлении космическими аппаратами с целью экономии топлива управление полетом осуществляется обычно путем всего нескольких сравнительно кратковременных включений маршевого двигателя. При этом для упрощения двигателя величина его силы тяги обычно не имеет плавной регулировки, т. е. двигатель может работать только в режиме «включено—выключено». В этом случае управление полетом осуществляется не путем
![]()
регулирования величины ускорения W, апутем (включения и выключения двигателя в соответствующие моменты времени, например, в следующей последовательности. На основании данных информационно-измерительного устройства ИИУ (см. рис. 1.1) управляющее устройство УУ
![]()
определяет требуемое изменение ∆Vтр вектора скорости аппарата. Затем корпус аппарата поворачивается вокруг центра масс таким образом, чтобы
![]() после включения маршевого двигателя сила его тяги Т совпадала по
после включения маршевого двигателя сила его тяги Т совпадала по
![]()
направлению с вектором ∆Vтр. Затем включается маршевый двигатель, создающий постоянное ускорение W, и происходит изменение вектора скорости аппарата по закону ∆V=W t .
Когда это изменение достигает требуемой величины ∆Vтр , маршевый двигатель выключается. Поскольку развороты корпуса происходят при выключенном маршевом двигателе, они осуществляются с помощью дополнительных малогабаритных двигателей, называемых двигателями ориентации. В качестве таких двигателей применяются малогабаритные реактивные двигатели, вектор тяги которых не проходит через центр масс аппарата, или маховики (вращающиеся массы).
Основные виды управления полетом
Различают следующие основные виды управления полетом:
1)автономное управление
2) самонаведение
3)телеуправление
Деление систем управления на автономные и неавтономные возможно по двум признакам — аппаратурному и информационному. При делении по аппаратурному признаку автономными считаются такие системы, в которых вся аппаратура, предназначенная для управления полетом летательного аппарата, расположена на борту этого аппарата. При делении по информационному признаку к автономным относятся такие системы, в которых после пуска (старта) летательного аппарата никакая дополнительная информация о положений или параметрах движения цели (пункта назначения) и КП не учитывается при образовании команд управления.
Автономное управление вследствие его информационной автономности непригодно для наведения на цели, расположение или параметры движения которых известны до пуска аппарата недостаточно точно или могут после пуска существенно измениться. Например, автономное управление не может обеспечить наведение снаряда на самолет противника, но пригодно для наведения баллистической ракеты на наземную цель, геоцентрические координаты которой до пуска снаряда известны
Автономное управление может быть программным или самонастраивающимся. При программном управлении летательный аппара