Курсовик по электротехнике
Устройство асинхронного двигателя трехфазного тока
Асинхронный двигатель трехфазного тока представляет собой электрическую машину, служащую для преобразования электрической энергии трехфазного тока в механическую. Благодаря простоте устройства, высокой надежности и эксплуатации и меньшей стоимостью по сравнению с другими двигателями асинхронные двигатели трехфазного тока нашли широкое применение в промышленности и сельском хозяйстве. С их помощью приводятся в движение металлорежущие и деревообрабатывающие станки, подъемные краны, лебедки, лифты, эскалаторы, насосы, вентиляторы и другие механизмы.
Двигатель имеет две основные части: неподвижную – статор и вращающуюся – ротор. Статор состоит из корпуса, представляющего собой основание всего двигателя. Он должен обладать достаточной механической прочностью и выполняется из стали, чугуна и алюминия. С помощью лап двигатель крепится к фундаменту или непосредственно к станине производственного механизма. Существуют и другие способы крепления двигателя к производственному механизму.
В корпус вмонтирован сердечник статора, представляющий собой полый цилиндр, на внутренней поверхности которого имеются пазы с обмоткой статора. Часть обмотки, находящейся вне пазов, называется лобовой; она отогнута к торцам сердечника статора. Так как в сердечнике статора действует переменный магнитный поток и на статор действует момент, развиваемый двигателем, сердечник должен изготовляться из ферромагнитного материала достаточной механической прочности. Для уменьшения потерь от вихревых токов сердечник статора собирают из отдельных листов (толщиной 0,35 – 0,5 мм) электротехнической стали и каждый лист изолируют лаком или другим изоляционным материалом.
Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминиевого провода. В качестве изоляции проводов друг от друга используют бумагу и хлопчатобумажную ткань, пропитанные различными лаками, слюда, стекловолокно и различные эмали. Для изоляции проводов обмотки от сердечника статора служат электроизоляционный картон, слюда, асбест, стекловолокно.
Обмотка статора состоит из трех отдельных частей, называемых фазами. Фазы могут быть соединены между собой звездой или треугольником. Как правило, начала обмоток на схемах обозначаются буквами А, В, С, концы – X, Y, Z. Обмотки двигателей малой и средней мощности изготовляют на напряжения 380/220 и 220/127 В. Напряжение, указанное в числителе, соответствует соединению обмоток звездой, в знаменателе – треугольником. Таким образом, один и тот же двигатель при соответствующей схеме соединения его обмоток может быть включен в сеть на любое указанное в паспорте напряжение. Существуют двигатели на 500, 660 и 1140 В. Двигатели высокого напряжения изготовляют на напряжения 3000 и 6000 В.
На корпусе двигателя имеется доска с зажимами, с помощью которых обмотка присоединяется к трехфазной сети. К каждому зажиму подключен соответствующий вывод обмотки. Для зажимов приняты следующие обозначения: зажимы, к которым подключены начала обмоток, обозначают буквами С1, С2 и С3, концы обмоток – соответственно С4, С5 и С6.
Сердечник ротора представляет собой цилиндр, собранный из отдельных листов электротехнической стали, в котором имеются пазы с обмоткой ротора.
Обмотки ротора бывают двух видов – короткозамкнутые и фазные. Соответственно этому различают асинхронные двигатели с короткозамкнутым и фазным ротором (с контактными кольцами). Короткозамкнутая обмотка состоит из стержней, расположенных в пазах, и замыкающих колец. Стержни присоединены к замыкающим кольцам, в результате чего обмотка оказывается короткозамкнутой. Стержни и замыкающие кольца в одних двигателях изготовляются из меди, в других из – алюминия, в третьих из бронзы и т.д. Алюминиевую обмотку получают путем заливки в пазы жидкого алюминия.
Фазную обмотку ротора выполняют так же, как и обмотку статора. Она всегда соединяется звездой. Начала фаз обмоток присоединяют к контактным кольцам, которые изготавливают из стали или латуни и располагают на валу двигателя. Кольца изолированы друг от друга, а также от вала двигателя. К кольцам прижимаются пружинами металлографитные щетки, расположенные в неподвижных щеткодержателях. С помощью контактных колец и щеток в цепь ротора включается дополнительный резистор, который является или пусковым (для увеличения пускового момента и одновременного уменьшения пускового тока) или регулировочным (для изменения частоты вращения ротора двигателя).
Вал ротора изготовлен из стали и вращается в шариковых или роликовых подшипниках. Подшипники укреплены в подшипниковых щитах, которые изготовлены из чугуна или стали и прикрепляются к корпусу болтами.
Тепловая энергия, возникающая в двигателе в результате потерь электрической энергии в его обмотках и магнитопроводе, нагревает двигатель. Для увеличения теплоотдачи ротор снабжен крыльчаткой, прикрепленной к замыкающим кольцам короткозамкнутой обмотки. Крыльчатка обеспечивает интенсивное движение воздуха внутри и снаружи двигателя.
Вращающееся магнитное поле.
Допустим в начале, что все проводники статора двухполюсного асинхронного двигателя размещены в двух диаметрально расположенных пазах и в обмотке действует постоянный ток.
Магнитная цепь двигателя содержит ферромагнитные участки: сердечник статора и ротора и воздушный зазор между ротором и статором.
Для любой линии магнитной индукции по закону полного тока можно записать
2H0l0 + Hстlст = Σ Iw,
где H0, Hст – напряженности магнитного поля соответственно в воздушном зазоре (l0 ) и в участках сердечников ротора и статора ( lст ); Iw – МДС одной фазы обмотки.
Следует отметить, что B и H в различных участках сердечника статора и ротора неодинаковые, например, в зубцах между пазами статора, а также ротора они имеют наибольшее значение, поскольку сечение магнитопровода в зубцах наименьшее.
Так как H = B/μa, а μa >> μ0 , то H0 >> Hсти, следовательно,
2H0l0 >> Hстlст.
Поэтому для упрощения анализа картины магнитного поля асинхронного двигателя можно полагать, что
2H0l0 ≈ Σ I w,
откуда
H0 = Σ I w/2l0,
и магнитная индукция в воздушном зазоре
B0 = μ0 Н0 .
Поскольку воздушный зазор одинаков по всей длине напряженность и магнитная индукция вдоль всего зазора будут иметь одинаковые значения.
Проводники второй и третьей фаз обмотки создают аналогичные магнитные поля, но сдвинутые в пространстве на угол 120о. Если одну фазу обмотки подключить к сети однофазного тока, где напряжение изменяется во времени синусоидально, то магнитное поле будет изменятся во времени синусоидально с частотой тока сети. Таким образом, магнитное поле, созданное синусоидальным током одной фазы, распределяется вдоль воздушного зазора примерно синусоидально, неподвижно в пространстве и изменяется во времени.
Обмотка статора асинхронного двигателя соединяется звездой или треугольником и подключается к сети трехфазного тока. Поскольку каждая фаза обмотки имеет одинаковое число витков и они симметрично расположены по окружности статора, их сопротивление и амплитуда тока будут одинаковыми, но токи в фазах обмотки будут сдвинуты по времени относительно друг друга на 120о. Токи каждой фазы обмотки создадут магнитные поля, которые, очевидно, будут сдвинуты во времени на тот же угол. В результате сложения двух магнитных полей всех фаз образуется общее магнитное поле двигателя. Магнитная индукция результирующего магнитного поля оказывается распределенной вдоль воздушного зазора также по синусоиде, ее амплитуда не изменится во времени и в 1,5 раза больше амплитуды магнитной индукции одной фазы. Результирующее поле вращается с постоянной частотой.
Принцип действия асинхронного двигателя
В обмотке статора, включенной в сеть трехфазного тока, под действием напряжения возникает переменный ток, который создает вращающееся магнитное поле. Магнитное поле пересекает проводники обмотки ротора и наводит в них переменную ЭДС, направление которой определяется по правилу правой руки. Поскольку обмотка ротора замкнута, ЭДС вызывает в ней ток того же направления.
В результате взаимодействия тока ротора с вращающимся магнитным полем возникает сила, действующая на проводники ротора, направление которой определяется по правилу левой руки. Сила создает момент, действующий в сторону.
Под действием момента ротор приводит в движение и после разбега вращается в том же направлении, что и магнитное поле, с несколько меньшей частотой вращения, чем поле:
n = (0,92 ÷ 0,98)n*0.
Все сказанное о принципе действия асинхронного двигателя справедливо, если обмотка ротора выполнена из ферромагнитного материала с теми же магнитными свойствами, что и сердечник ротора. В действительности обмотка ротора выполняется из неферромагнитного материала (меди или алюминия), поэтому магнитная индукция в пазу с проводниками намного меньше, чем в зубцах. Основная сила, вызывающая момент вращения, возникает в результате взаимодействия магнитного поля ротора с вращающимся магнитным полем статора и приложена к зубцам ротора. На проводник действует только небольшая сила. Однако для анализа работы двигателя и получения расчетных уравнений обычно считают, что в основе принципа действия асинхронного двигателя лежит закон Ампера – взаимодействие проводника с током и магнитного поля. Такая трактовка закономерна, поскольку результаты расчета при этом совпадают с полученными из принципа взаимодействия магнитных полей ротора и статора.
Схема замещения асинхронного двигателя
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмоткой статора) гальванически вместо магнитной связи, существующей в двигателе.
Основное отличие асинхронного двигателя от трансформатора в электрическом отношении состоит в следующем. Если в трансформаторе энергия, переданная переменным магнитным полем во вторичную цепь, поступает к потребителю в виде электрической энергии, то в асинхронном двигателе энергия, переданная вращающимся магнитным полем ротору, преобразуется в механическую и отдается валом двигателя потребителю в виде механической энергии.
Электромагнитные мощности, передаваемые магнитным полем во вторичную цепь трансформатора и ротору двигателя, имеют одинаковые выражения:
Рэм = Р1 – ΔР1.
В трансформаторе электромагнитная мощность за вычетом потерь во вторичной обмотке поступает потребителю:
Р2 = Рэм – 3I22 r2 = 3U2 I2 cosφ2 = 3I22 rП = 3I '22 r'П,
где rП– сопротивление потребителя.
В асинхронном двигателе электромагнитная мощность за вычетом потерь в обмотке ротора превращается в механическую мощность:
Р2 = Рмех = Рэм – 3I22r2 = Pэм – 3I'22r'2
Pмех = (3 I22 r2 (1–s))/s = 3I'22 r'2 (1–s))/s = 3I22 r'э = 3I'22 r'э ,
где r'э = (r'2 (1–s))/
Сравнивая выражения можно заключить, что r'П = r'э .
Таким образом, потери мощности в сопротивлении численно равны механической мощности, развиваемой двигателем.
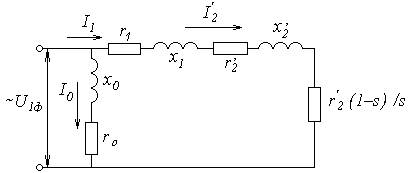
Схема замещения
Заменив в схеме замещения трансформатора сопротивление нагрузки r'П на r'э = (r'2 (1–s))/, получим схему замещения асинхронного двигателя. Все остальные элементы схемы аналогичны соответствующим элементам схемы замещения трансформатора: r1, x1 – активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки ротора.
Приведенные значения определяются так же, как и для трансформатора:
r'2 = r2k2 , x'2 = x2k2,
где k = E1 /E2k = U1ф /E2k– коэффициент трансформации двигателя.
Может возникнуть сомнение в возможности использования гальванической связи цепей статора и ротора в схеме замещения, поскольку частоты в этих цепях на первый не одинаковы. Первая часть схемы замещения представляет собой эквивалентную схему фазы обмотки ротора, которая приведена к частоте тока статора. В реальном же двигателе в отличие от схемы замещения частоты тока ротора и статора не одинаковы.
Механическая характеристика асинхронного двигателя
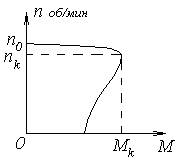
Механической характеристикойназывается зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы: n = f(M) или s = f(M).
Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы Мэм = (3I22r2)/ω0s и схемы замещения.
С помощью схемы замещения определяют приведенный ток фазы ротора:
______________________________________
I'2 = U1ф /√(r1 + r'2/s) + (x1 + x'2)2
где
r'2/s = r'2 + r'2(1– s)/s
Полученное значение тока I'2 подставляют в уравнение момента, в котором предварительно I2и r2 заменяют через их приведенные значения:
М = (3I22r2)/ω0s = (3I'22r'2)/ω0s
После подстановки получим
I'2 = 3U1ф2 r'2 / ω0s ((r1 + r'2/s) + (x1 + x'2)2) (1)
Это выражение представляет собой уравнение механической характеристики, поскольку оно связывает момент и скольжение двигателя. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя – постоянны и не зависят от и M. Располагая параметрами двигателя, можно рассчитать и построить его механическую характеристику, которая будет иметь вид:
 Однако необходимо отметить, что после включения двигателя в нем происходят сложные электромагнитные процессы. В тех случаях, когда время разбега оказывается соизмеримым с временем электромагнитных процессов, механическая характеристика двигателя будет существенно отличаться от статической.
Однако необходимо отметить, что после включения двигателя в нем происходят сложные электромагнитные процессы. В тех случаях, когда время разбега оказывается соизмеримым с временем электромагнитных процессов, механическая характеристика двигателя будет существенно отличаться от статической.
Одной из важнейших точек характеристики, представляющей интерес при анализе работы и выборе двигателя, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр,sкр,Mmax .
Значение критического скольжения sкр, при котором двигатель развивает максимальный (критический) момент Mmax , легко определить, если взять производную dM/ds выражения (1) и приравнять ее нулю.
После дифференцирования и последующих преобразований выражение sкрбудет иметь следующий вид:
________
sкр = ± r'2/√r12 + xк2(2)
где xк = x1 + x'2
Подставим sкрвместо в уравнение (1), получим выражение максимального момента
________
Мmax = 3U1ф2 / 2ω0s (r1 ± √r12 + xк2) (3)
Необходимо отметить, что из выражений (1) – (3) вытекает следующее.
Момент, развиваемый двигателем, при любом скольжении пропорционален квадрату напряжения. Максимальный момент пропорционален квадрату напряжения и не зависит от сопротивления цепи ротора. Критическое скольжение пропорционально сопротивлению цепи ротора и не зависит от напряжения сети.
Полученные выражения удобны для анализа, однако, из-за отсутствия в каталогах параметров r1, x1, x2 их использование для расчетов и построений характеристик затруднено.
В практике обычно пользуются уравнением механической характеристики, с помощью которой можно произвести необходимые расчеты и построения, используя только каталожные данные.
Активное сопротивление обмотки статора r1 значительно меньше остальных сопротивлений статора и ротора, и им обычно пренебрегают. Тогда выражения (1) – (3) будут иметь вид
М = 3U1ф2r'2 /ω0s (( r'2 /s)2 + xк2) (4)
sкр = ± r'2/ xк(5)
Мmax = 3U1ф2 /2ω0 xк(6)
Упрощенное уравнение механической характеристики получается из совместного решения уравнений (4) – (6)
M = 2Mmax/(s/sкр + sкр /s) (7)
Значение Mmax определяется из соотношения Mmax /Mном = λ, указанного в каталогах, а sкр – из уравнения (7), если решить его относительно sкр и вместо текущих значений и M подставить их номинальные значения, которые легко определить по паспортным данным:
_____
sкр = sном(λ ± √λ2 – 1) (8)
где sном = (n0 – nном )/n0 ; λ = Mmax /Mном .
Следует отметить, что в зоне от М = 0 до М ≈ 0,9Мmax механическая характеристика близка к прямой линии. Поэтому, например, при расчетах пусковых и регулировочных резисторов эту часть механической характеристики принимают за прямую линию, проходящую через точки M = 0, n = 0 и Mном, nном. Уравнение механической характеристики в этой части будет иметь вид
M = s Mном / sном
Пуск асинхронных двигателей
Для пуска двигателя его обмотку статора подключают к трехфазной сети с помощью выключателя. После включения выключателя происходит разгон двигателя. Двигатель разгоняется до устанавливающейся частоты вращения, при котором момент, развиваемый двигателем, равен моменту сил сопротивления на его валу.
В условиях нормальной работы момент на валу двигателя может изменяться в довольно широких пределах, однако, если момент окажется больше Mmax, двигатель остановится. Обычно считают, что допустимые изменения находятся в пределах от М = 0 до М = (0,8 ÷ 0,9) Mmax . Естественно, имеется в виду работа в зоне характеристики, где s < sкр .
Однако следует заметить, что длительная работа двигателя допустима при моментах на валу, не превышающих номинального значения.
Если оказалось, что двигатель вращается не в требуемом направлении, то для изменения направления вращения ротора необходимо изменить порядок подсоединения обмотки статора к сети: начало обмотки С1 соединить с линейным проводом В, начало обмотки С2 – с проводом А, начало обмотки С3 оставить соединенным с проводом С. При этом изменить порядок чередования фаз, что приведет к изменению направления вращения магнитного поля статора и, следовательно, ротора.
К недостаткам такого пуска относятся:
1) относительно малый пусковой момент: МП = (1,2 ÷ 1,6)Мном ;
2) относительно большой пусковой ток: IП = (5 ÷ 7)Iном .
Из-за первого недостатка иногда приходится выбирать двигатель большей мощности, чем это требуется по условиям работы при установившемся режиме, что экономически нецелесообразно.
Большой ток в периоды пуска двигателя может вызвать значительное падение напряжения в сети малой мощности, что неблагоприятно скажется на работе других потребителей, включенных в сеть, например, вызовет мигание осветительных приборов. Однако следует отметить, сто в настоящее время заводские сети имеют большое сечение, поэтому падение напряжения, возникающее при пуске двигателя, оказывается несущественным.
Большой пусковой ток ограничивает допустимое значение пусков (включений) двигателя в час. При большом числе включений в час даже мало загруженный в установившемся режиме двигатель из-за больших пусковых токов может перегреться и выйти из строя.
В маломощных сетях, сечение проводов которых невелико, а напряженность значительная, для ограничения пускового тока применяют пуск с активным или индуктивным сопротивлением, включенным в цепь обмотки статора, или пуск с переключением обмотки со звезды на треугольник.
Перед пуском выключатель В2 устанавливают в выключенное положение, Затем включают выключатель В1. После окончания разбега ротора двигателя включают выключатель В2, чем шунтируют добавочные пусковые резисторы. Соответствующим подбором сопротивления rД можно ограничить пусковой ток до любого необходимого значения. Однако не следует забывать, что одновременно уменьшаются пусковой и критический моменты из-за снижения напряжения на обмотке статора, вызванного падением напряжения на сопротивлении rД .
Пуск двигателя с переключением со звезды на треугольник возможен, когда обмотка статора может быть соединена звездой и треугольником и напряжение сети соответствует соединению обмотки статора треугольником.
Пуск двигателя с фазным ротором (контактными кольцами) осуществляется подключением обмотки статора к сети с предварительно введенными в цепь ротора добавочными резисторами rД. По мере разгона двигателя резисторы rД с помощью движка выводятся и по окончании пуска сопротивление резистора обращается в нуль, а обмотка ротора оказывается замкнутой накоротко, как и у двигателя с короткозамкнутым ротором. Введение добавочного сопротивления в цепь ротора при пуске асинхронного двигателя с контактными кольцами позволяет увеличить пусковой момент вплоть до максимального значения и одновременно значительно снизить пусковой ток. Это является одной из главных причин, почему вместо асинхронных двигателей с короткозамкнутым ротором применяют двигатели с фазным ротором.
Тормозные режимы работы
Работа многих производительных механизмов состоит из трех этапов: пуска в ход, технологической операции и торможения. После отключения двигателя торможение происходит под действием сил трения, при этом кинетическая энергия движущихся частей выделяется в виде теплоты в узлах трения механизма. В тех случаях, когда запас кинетической энергии велик, а силы трения малы, время торможения может составить десятки секунд и даже минут.
Сокращение время торможения, особенно когда время торможения технологической операции мало и исчисляется минутами или секундами, может значительно повысить производительность механизма, так как при торможении обычно полезной работы не совершается. Поэтому для сокращения времени торможения раньше применялись механические тормоза.
Транспортные устройства (электровозы, лебедки, мостовые краны, экскаваторы, эскалаторы) отличаются тем, что в них возникают условия, когда под действием сил тяжести они могут развивать недопустимо высокие скорости. Для поддержания скорости на заданном уровне в этих условиях раньше использовались рабочие механические тормоза, которые обычно состоят из неподвижных тормозных колодок, прижимающих силами пружины или другими способами к тормозному диску или барабану; в результате трения между колодками и диском возникает тормозной момент. Механические тормоза имеют ряд существенных недостатков, главными из которых являются быстрый износ трущихся поверхностей, трудность регулирования силы трения, значительное место, занимаемое тормозом. Оказывается, двигатель может выполнять функции механических тормозов, работая при этом в том или ином тормозном режиме.
В настоящее время широко используются тормозные свойства двигателя, что во многих случаях позволило отказаться от механических тормозов. Механические тормоза необходимы как запасные или аварийные, если откажет электрическое торможение, а также для удержания механизма в неподвижном состоянии.
Асинхронный двигатель может работать в следующих тормозных режимах:
1) генераторном с отдачей энергии в сеть;
2) противовключения;
3) динамического торможения;
Во всех тормозных режимах двигатель развивает момент, действующий в сторону, противоположную направлению вращения ротора, поэтому он называется тормозным моментом. Под действием этого момента в одних случаях происходит быстрое торможение, в других – поддержание заданной скорости.
Генераторным тормозным режимомназывается режим работы двигателя, когда под действием внешнего момента ротор двигателя вращается в том же направлении, что и магнитное поле, но с большей частотой вращения. Направление возникающей при этом ЭДС в обмотке ротора определяется по правилу правой руки. Поскольку обмотка ротора замкнута, в ней возникает ток того же направления. В результате взаимодействия тока ротора с вращающимся магнитным полем создаются сила и момент, направленные в сторону, противоположною вращению ротора, что легко определить с помощью правила левой руки.
Тормозной режим противовключения возникает в том случае, когда под действием внешнего момента, приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля.
Для анализа тормозных режимов воспользуемся уравнением механической характеристики двигателя
М = 2Мmax /(sкр /s + s/sкр )
В двигательном режиме скольжение изменяется в пределах от = 1 = 0 механические характеристики располагаются в квадранте I. Если в уравнения подставить значения больше единицы и меньше нуля, то механическая характеристика окажется соответственно в квадрантах IV и II. В квадранте II ротор вращается в сторону поля, но с большей частотой (n = n0), в квадранте – IV против поля. Таким образом, участок механической характеристики, расположенный в квадранте , соответствует генераторному тормозному режиму, в квадранте – тормозному режиму противовключением.
Энергетические показатели асинхронного двигателя
Важным в энергетическом отношении характеристиками двигателя являются зависимость КПД η и коэффициента мощности cos φ от нагрузки на его валу. КПД двигателя ревен отношению мощности, отдаваемой двигателем с вала, PBк мощности , потребляемой двигателем из сети, Р1:
η = РВ/Р1 = РВ/(РВ + ΔР)
где ΔР – потери мощности в двигателе.
ΔР = ΔРобм1 + ΔРобм2 + ΔРст1 + ΔРст2 + ΔРмех
Потери мощности в двигателе можно разделить на две части: часть
ΔРК = ΔРст1 + ΔРст2 + ΔРмех
почти не зависти от нагрузки и называется постоянными потерями, другая часть
ΔРv = ΔРобм1 + ΔРобм2
зависит от нагрузки и называется переменными потерями.
Коэффициент мощности двигателя равен отношению активной мощности, потребляемой двигателем из сите, к полной мощности:
________
cosφ = P1 /S1 = P1 /√P12 + Q12 (9)
Реактивная мощность Q складывается из мощности QГ,обусловленной главным магнитным потоком, и мощности Qр, обусловленной потоками рассеяния:
QГ = I02 x0, QР = I12 x1 + I12 x1
где x0 – индуктивное сопротивление, обусловленное главным магнитным потоком; x1, x2 – индуктивные сопротивления, обусловленные потоками рассеяния обмоток статора и ротора.
Поскольку главный магнитный поток намного больше потоков рассеяния и почти не зависит от нагрузки, реактивная мощность, потребляемая двигателем из сети, мало зависит от нагрузки и, как следует из выражения (9), cosφ существенно изменяется при изменении нагрузки на валу двигателя.
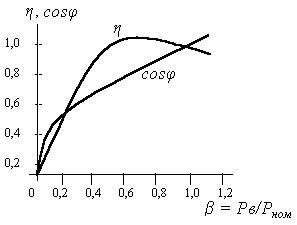
Из графика видно, что при малых нагрузках cosφ довольно низкий, что является в энергетическом отношении весьма невыгодным.