Радиолиния передачи цифровой командной информации с наземного пункта управления на борт ИСЗ
Московский ОРДЕНА ЛЕНИНА И ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ Авиационный Институт имени СЕРГО ОРДЖОНИКИДЗЕ
(технический университет)
Кафедра 402
“радиосистемы управления и передачи информации”
Курсовой проект
на тему
Радиолиния передачи цифровой командной информации |
с наземного пункта управления на борт ИСЗ |
Выполнил: | студент группы 04-519 Гуренков Дмитрий |
Проверил: | преподаватель Большов О. А. |
Москва 2004 год
Содержание
Задание 3
Цифровая радиолиния с сигналом КИМ-ФМ 3
Основной тракт радиолинии 4
Система фазовой автоподстройки частоты (ФАП) 5
Система посимвольной синхронизации 7
Определение параметров имитационной модели 9
Анализ результатов расчета и моделирования 10
Литература 10
ЗаданиеВыполнить системное проектирование командной радиолинии (КРЛ) «Земля - ИСЗ» на основе исходных данных об ожидаемых сеансах связи.
Выбрать параметры радиосигнала, способ кодирования, структуру и параметры передающих и приемных трактов радиолинии, обеспечивающих выполнение заданных технических условий. Задать требования на проектирование подсистемы символьной синхронизации и подсистемы захвата и выделения несущей частоты.
Подтвердить принятые решения имитационным моделированием.
Сравнить спроектированную радиолинию с радиолинией оптимальной для заданного сигнала.
Цифровая радиолиния с сигналом КИМ-ФМВ цифровой системе передачи информации с радиосигналом КИМ-ФМ необходимо оценить точность передачи сообщения и выбрать основные параметры радиолинии, определяющие точность. Известно, что в системе непрерывно последовательно передаются команды, либо ведется прием телеметрических данных ![]() . Начало и конец каждой команды (слова) отмечаются символом (импульсом). В приемном устройстве применяется посимвольный прием.
. Начало и конец каждой команды (слова) отмечаются символом (импульсом). В приемном устройстве применяется посимвольный прием.
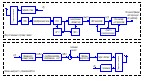
Рисунок 1. Функциональная схема радиолинии КИМ-ФМ
Необходимо знать - скорость передачи информации R (двоичных единиц в секунду), энергетический потенциал радиолинии, закон изменения несущей частоты из-за нестабильности передатчика и движения передающего и принимающего пунктов. Предполагается также, что символы в КИМ сигнале могут считаться независимыми, а априорная вероятность появления нуля и единицы одинакова.
Функциональная схема рассматриваемой радиолинии представлена как Рисунок 1. Сообщение ![]() поступает на временной коммутатор, где квантуется по времени, превращаясь в сигнал АИМ. Далее в преобразователе «напряжение — код» вырабатывается сигнал КИМ, в котором в двоичной форме закодирована амплитуда импульса АИМ и, следовательно, величина сообщения. Кодовое слово передается в течение времени
поступает на временной коммутатор, где квантуется по времени, превращаясь в сигнал АИМ. Далее в преобразователе «напряжение — код» вырабатывается сигнал КИМ, в котором в двоичной форме закодирована амплитуда импульса АИМ и, следовательно, величина сообщения. Кодовое слово передается в течение времени ![]() . Сформированный видеосигнал модулирует несущую по фазе, образуя сигнал КИМ-ФМ.
. Сформированный видеосигнал модулирует несущую по фазе, образуя сигнал КИМ-ФМ.
В приемном устройстве после преобразования и усиления происходит синхронное детектирование (перемножение). Опорное напряжение для синхронного детектора вырабатывает система ФАП. Продетектированный видеосигнал интегрируется.
После интегратора сигнал поступает по основному тракту на решающее устройство. Здесь в определенные моменты времени ![]() , соответствующие каждому разряду кодового слова, оценивается значение символа (0 или 1). Для этого напряжение сигнала
, соответствующие каждому разряду кодового слова, оценивается значение символа (0 или 1). Для этого напряжение сигнала ![]() сравнивается с порогом
сравнивается с порогом ![]() и принимается решение о наличии символа «1», если
и принимается решение о наличии символа «1», если ![]() и о наличии «0», если
и о наличии «0», если ![]() . Для оптимальной системы КИМ-ФМ пороговое напряжение берут равным
. Для оптимальной системы КИМ-ФМ пороговое напряжение берут равным ![]() 1. Моменты
1. Моменты ![]() определяются в тракте символьной синхронизации. Оценки символов из решающего устройства поступают на регистрацию и далее на систему вторичной обработки информации, где производится коррекция искаженных слов, выделение сообщения и оценка его параметров.
определяются в тракте символьной синхронизации. Оценки символов из решающего устройства поступают на регистрацию и далее на систему вторичной обработки информации, где производится коррекция искаженных слов, выделение сообщения и оценка его параметров.
В качестве показателя точности основного тракта принимается вероятность неправильной оценки символа (![]() ). Эта величина, в свою очередь, является исходной для проектирования системы вторичной обработки информации. В зависимости от применяемых здесь алгоритмов через
). Эта величина, в свою очередь, является исходной для проектирования системы вторичной обработки информации. В зависимости от применяемых здесь алгоритмов через ![]() могут быть получены и другие меры точности, как, например, вероятность ошибки в кодовом слове или среднеквадратическая ошибка восстановленного сообщения.
могут быть получены и другие меры точности, как, например, вероятность ошибки в кодовом слове или среднеквадратическая ошибка восстановленного сообщения.
В качестве внешнего воздействия на систему будем рассматривать собственный шум приемника, заданный энергетическим потенциалом ![]() .
.
Анализ основного тракта радиолинии целесообразно начать с выяснения принципиальной возможности получить приемлемые результаты в заданных условиях. Дело в том, что энергетический потенциал и скорость передачи информации, значения которые заданы, уже определяют минимально возможную вероятность искажения символа. Если вероятность искажения сигнала окажется слишком большой, то не имеет смысла рассчитывать реальную радиолинию, которая, разумеется, будет еще хуже.
Вероятность ошибки при оценке символа в сигнале КИМ-ФМ для оптимальной обработки равна
 , (1)
, (1)
![]() - мощность сигнала КИМ-ФМ,
- мощность сигнала КИМ-ФМ, ![]() - длительность одного символа,
- длительность одного символа, ![]() - спектральная плотность шума. После расчета ошибки по формуле (1) может оказаться необходимым потребовать изменить исходные условия — увеличить энергетический потенциал или уменьшить скорость передачи и только после этого приступить к расчету реальной радиолинии.
- спектральная плотность шума. После расчета ошибки по формуле (1) может оказаться необходимым потребовать изменить исходные условия — увеличить энергетический потенциал или уменьшить скорость передачи и только после этого приступить к расчету реальной радиолинии.
Рассмотрим прохождение сигнала через основной тракт приемного устройства (Рисунок 1), полагая, что вспомогательные системы (ФАП и тракт синхронизации) работают идеально. В этом случае сигнал детектируется в синхронном детекторе независимо от шума.
После прохождения интегратора сигнал искажается, как показано на Рисунок 2 (штриховой линией). На этом рисунке отмечены также моменты ![]() , которые взяты в середине каждого разряда.
, которые взяты в середине каждого разряда.
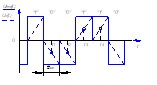
Рисунок 2. Сигнал на выходе линии КИМ-ФМ
Оптимальная система предполагает наличие интегратора со сбросом, который интегрирует напряжение с выхода синхронного детектора в течение времени, отведенного на передачу символа. Моменты, в которые производится оценка символа, следует при этом брать в конце каждого разряда. Однако это возможно только в том случае, когда в системе имеется точная посимвольная синхронизация (именно точную посимвольную синхронизацию мы и будем использовать). Иначе ошибки синхронизации приведут к тому, что почти в половине случаев оценка будет происходить не в конце данного разряда, а в начале следующего, что, в свою очередь, приведет к возрастанию вероятности ошибок в оценке символа. Чем ближе к середине будут взяты моменты ![]() , тем меньше требования к точности посимвольной синхронизации.
, тем меньше требования к точности посимвольной синхронизации.
Рассмотрим теперь условия, при которых обеспечивается нормальная работа вспомогательных трактов. Опорное напряжение для синхронного детектора вырабатывается с помощью системы фазовой автоподстройки частоты (ФАП).
Получение опорного напряжения предсавляет собой особую техническую задачу. Для этой цели невозможно использовать независимый гетеродин в приемном устройстве, так как его колебания практически не будут когерентными с несущей сигнала. Причиной является уходы частоты из-за нестабильности генератора, долеровское смещение частоты из-зи движения пункта передачи или приема и т. д. Для обеспечения когерентности гетеродина в приемнике необходимо синхронизировать приходящим сигналом.
Первый способ создания когерентного опорного напряжения – способ который мы и будем реализовывать. Когда в спектре сигнала имеется компонента на несущей частоте ![]() , ее используют для синхронизации гетеродина обычно с помощью системы ФАП либо непосредственно выделяют с помощью узкополосного фильтра и после соответствующей обработки (усиления, ограничения, поворота фазы) берут в качестве опорного напряжения. Поворот фазы, который надо сделать в опорном канале, зависит от фазы компоненты на несущей частоте, т. е. при КИМ-ФМ от параметров сигнала
, ее используют для синхронизации гетеродина обычно с помощью системы ФАП либо непосредственно выделяют с помощью узкополосного фильтра и после соответствующей обработки (усиления, ограничения, поворота фазы) берут в качестве опорного напряжения. Поворот фазы, который надо сделать в опорном канале, зависит от фазы компоненты на несущей частоте, т. е. при КИМ-ФМ от параметров сигнала ![]() и
и ![]() (где
(где ![]() - коэффициент передачи фазовой модуляции (рад/В),
- коэффициент передачи фазовой модуляции (рад/В), ![]() - «1» в среднем занимают столько же времени, сколько «0»). Так, например, если принято
- «1» в среднем занимают столько же времени, сколько «0»). Так, например, если принято ![]() и, следовательно, гармоника на несущей частоте определяется как
и, следовательно, гармоника на несущей частоте определяется как
![]() , (2)
, (2)
фаза опорного сигнала должна совпадать с фазой несущей.
Чаще, однако, имеет место случай, когда специально делают ![]() , чтобы сохранить в спектре компоненту на несущей частоте. При этом фаза опорного напряжения должна отличаться на
, чтобы сохранить в спектре компоненту на несущей частоте. При этом фаза опорного напряжения должна отличаться на ![]() от фазы несущей сигнала. Нетрудно видеть, что, уменьшая индекс фазовой модуляции (
от фазы несущей сигнала. Нетрудно видеть, что, уменьшая индекс фазовой модуляции (![]() ) для сохранения несущей, мы тем самым снижаем амплитуду полезноых компонент. Следовательно, выбор величины
) для сохранения несущей, мы тем самым снижаем амплитуду полезноых компонент. Следовательно, выбор величины ![]() приходится проводить исходя из противоречивых требований. Практически можно взять, например,
приходится проводить исходя из противоречивых требований. Практически можно взять, например, ![]() равной
равной ![]() . При этом мощность на несущей составляет около четверти всей мощности сигнала.
. При этом мощность на несущей составляет около четверти всей мощности сигнала.
Таким образом, часть энергии передатчика расходуется для работы канала синхронизации. Это, естественно, ухудшает условия выделения полезного сообщения по сравнению с идеальным случаем. Другая трудность, связанная с выделением компоненты на несущей частоте из сигнала ИМ-ФМ, возникает из-за того, что вблизи частоты ![]() располагаются составляющие передаваемого сообщения, которые могут попасть в опорный канал и внести помехи в работу синхронного детектора. Тогда шумовая полоса ФАП
располагаются составляющие передаваемого сообщения, которые могут попасть в опорный канал и внести помехи в работу синхронного детектора. Тогда шумовая полоса ФАП ![]() должна быть выбрана так, чтобы удовлетворялось условие
должна быть выбрана так, чтобы удовлетворялось условие
![]() . (3)
. (3)
Другой способ создания когерентного опорного напряжения основан на выделении нужного колебания из сигнала после предварительного снятия модуляции. Пусть в спектре сигнала ИМ-ФМ не содержится несущая, т. е. ![]() и
и ![]() . Нужное колебание частоты
. Нужное колебание частоты ![]() можно создать в результате определенных нелинейных преобразований сигнала в опорном канале. Эти преобразования сводятся к последовательносму умножению и делению частоты входного сигнала на два.
можно создать в результате определенных нелинейных преобразований сигнала в опорном канале. Эти преобразования сводятся к последовательносму умножению и делению частоты входного сигнала на два.
Технически применение последовательного умножения и деления частоты оказывается неудобным. Разработан рад практически более удобных схем, позволяющих реализовать тот же принцип. Имеются и другие достаточно простые схемы. Однако всем им присущ общий недостаток: они не исключают перехода синхронного детектора в обратный режим работы. Действительно, фаза опорного напржения, полученного в результате деления частоты, всегда будет иметь неопределенность на ![]() . Практически фаза будет зависеть от начальных условий на делителе и может случайно измениться на
. Практически фаза будет зависеть от начальных условий на делителе и может случайно измениться на ![]() при всякого рода внешних воздействиях, перерывах в связи и т. д. Неожиданный переход к обратному режиму является недопустимым искажением. Поэтому в сигнале приходится предусматривать специальные контрольные посылки, которые обнаруживают обратную работу. Естественно, что на создание таких контрольных посылок затрачивается часть энергии передатчика, что соответственно сказвается на выделении полезного сообщения.
при всякого рода внешних воздействиях, перерывах в связи и т. д. Неожиданный переход к обратному режиму является недопустимым искажением. Поэтому в сигнале приходится предусматривать специальные контрольные посылки, которые обнаруживают обратную работу. Естественно, что на создание таких контрольных посылок затрачивается часть энергии передатчика, что соответственно сказвается на выделении полезного сообщения.
И так, при рассмотрении основного тракта выделения сообщений предполагается, что фазовые ошибки в канале опорного напряжения достаточно малы.
Теперь рассмотрим один из главных параметров - полосу захвата ![]() . Выбор этой величины при проектировании определяется рядом факторов, многие из которых являются противоречивыми. Так, очевидно, что для уменьшения шумовых флюктуации фазы опорного гетеродина надо уменьшить
. Выбор этой величины при проектировании определяется рядом факторов, многие из которых являются противоречивыми. Так, очевидно, что для уменьшения шумовых флюктуации фазы опорного гетеродина надо уменьшить ![]() . Однако при этом увеличится постоянная ошибка слежения согласно
. Однако при этом увеличится постоянная ошибка слежения согласно
 . (4)
. (4)
Если частота несущей сигнала заранее известна с большой ошибкой, то приходится в систему ФАП дополнительно вводить устройство поиска, перестраивающее гетеродин до тех пор, пока частота сигнала не окажется в полосе захвата. Однако в нашем случае мы будем считать, что несущая частота нам заранее известна с малой ошибкой. Время поиска ![]() обычно ограничено. Поэтому скорость перестройки
обычно ограничено. Поэтому скорость перестройки ![]() нельзя выбирать очень малой. С другой стороны, при большой скорости и узкой полосе захвата можно пропустить сигнал. Это обстоятельство также ограничивает возможность сужения полосы
нельзя выбирать очень малой. С другой стороны, при большой скорости и узкой полосе захвата можно пропустить сигнал. Это обстоятельство также ограничивает возможность сужения полосы ![]() . Таким образом, возникает задача оптимального выбора полосы захвата при наличии ограничении. Поскольку система ФАП предназначена для выработки опорного напряжения в синхронном детекторе, в качестве основного критерия можно принять максимум полезного напряжения сигнала на его выходе.
. Таким образом, возникает задача оптимального выбора полосы захвата при наличии ограничении. Поскольку система ФАП предназначена для выработки опорного напряжения в синхронном детекторе, в качестве основного критерия можно принять максимум полезного напряжения сигнала на его выходе.
Посимвольная синхронизация используется при посимвольном приеме кодовых слов и обеспечивает разделение элементарных сигналов, соответствующих различным позициям кодового слова. Требования к точности посимвольной синхронизации зависят от используемого способа обработки элементарных информационных сигналов в приемнике. При обработке, близкой к оптимальной, а она в нашем случае именно такая, необходимо достаточно точное определение границ этих сигналов. Требования к точности синхронизации возрастают с уменьшением длительности элементарных сигналов.

Рисунок 3. Функциональная схема инерционной системы посимвольной синхронизации
Для выделения сигналов посимвольной синхронизации непосредственно используется последовательность принимаемых информационных символов. На Рисунок 3 показана функциональная схема инерционной системы посимвольной синхронизации. В результате дифференцирования сигнала ![]() , образуется последовательность импульсов, временное положение которых соответствует границам между соседними символами «1» и «0». Эта последовательность поступает на временной дискриминатор, который вырабатывает управляющее напряжение, пропорциональное временнóму рассогласованию между входной и опорной последовательностью импульсов. Последняя и используется в качестве сигналов посимвольной (тактовой) синхронизации. Опорная последовательность вырабатывается генератором синхронизирующих сигналов. С помощью управляющего напряжения изменяется частота следования импульсов опорной последовательности, тем самым обеспечивается автоматическая подстройка генератора синхронизирующих сигналов.
, образуется последовательность импульсов, временное положение которых соответствует границам между соседними символами «1» и «0». Эта последовательность поступает на временной дискриминатор, который вырабатывает управляющее напряжение, пропорциональное временнóму рассогласованию между входной и опорной последовательностью импульсов. Последняя и используется в качестве сигналов посимвольной (тактовой) синхронизации. Опорная последовательность вырабатывается генератором синхронизирующих сигналов. С помощью управляющего напряжения изменяется частота следования импульсов опорной последовательности, тем самым обеспечивается автоматическая подстройка генератора синхронизирующих сигналов.
Анализ таких систем имеет целью определить флюктуации моментов временных меток относительно положения, соответствующих идеальной работе. В качестве показателя точности можно взять среднеквадратическую ошибку, которая для нормальной работы должна быть много меньше длительности одного символа.
Определение параметров имитационной модели- Источник дискретных сообщений:
- дискретные независимые сообщения с заданными вероятностями появления в источнике V(1) = 4;
- количество различных сообщений JU = 32;
- вероятность появления различных значений сообщения A(1...18) = 0.055;
- Кодирующее устройство:
- двоичный безызбыточный код V(2) = 1;
- количество символов NS = 5;
- Радиоканал:
- радиоканал, использующий сигнал КИМ-ФМ и приемный тракт с линейным усилением, синхронным детектором и интегратором V(7) = 1, V(9) = 1;
- девиация фазы равна
 , что соответствует A(172) = 0.577;
, что соответствует A(172) = 0.577; - длительность интегрирования, отнесенная к длительности символа A(171) = 0.8, т. е. время интегрирования равно длительности символа;
- Аддитивные помехи:
- широкополосная шумовая помеха. На входе радиоканала такая помеха представляет собой “белый” шум.
- параметром модели помехи является дисперсия
 . Таким образом, A(151) = 0.295;
. Таким образом, A(151) = 0.295; - Замирание амплитуды сигнала (фединг):
- замирания амплитуды отсутствует V(6) = 1;
- Временное положение меток системы символьной синхронизации:
- флюктуация временного положения меток отсутствуют (символьная синхронизация идеальная) V(3) = 1;
- номинальное положение метки
 , соответственно A(131) = 0.1;
, соответственно A(131) = 0.1; - Флюктуация фазы опорного напряжения синхронного детектора:
- идеальный синхронный детектор V(4) = 0;
- Декодирующее устройство:
- однопороговое распознание двоичных символов и декодирование кодовых слов с помощью метрики Хэмминга V(8) = 1;
- порог A(191) = 0;
- Продолжительность эксперимента:
- продолжительность машинного эксперимента определяется объемом исследуемой выборки сообщений (кодовых слов). Возьмем количество слов равное количеству команд переданных за сеанс связи M = 3000;
- Дополнительные параметры:
- IX = 7.
Расчеты, проведенные при выборе базового варианта радиолинии, дали следующие показатели достоверности приема информации:
- вероятность ошибки символа –
 ;
; - вероятность отказа от декодирования –
 ;
; - вероятность ошибки кодового слова –
 ;
;
В результате моделирования получены следующие оценки достоверности:
- вероятность ошибки символа –
 ;
; - вероятность отказа от декодирования –
 ;
; - вероятность ошибки кодового слова –
 ;
;
При моделировании была взята выборка ![]() командных слов, что соответствует длительности сеанса 8 минут.
командных слов, что соответствует длительности сеанса 8 минут.
Заметим, что результаты расчета и моделирования более чем близки по своим значениям, при этом показатели в обоих случаях удовлетворяют ТЗ.
Оценим точность статического эксперимента при моделировании, учитывая количество независимых испытаний в данном эксперименте их 3000.
- вероятность ошибки символа равна
 ;
; - вероятность отказа от декодирования равна
 ;
; - вероятность ошибки кодового слова равна
 ;
;
Подведем итог. Все получившиеся различия в результатах расчета и моделирования, являются неизбежными, так как всего в нашей с вами жизни не учтешь.
Литература- “Теория и проектирование радиосистем”, Л. В. Березин, В. А. Вейцель. – М.: Сов. радио, 1977.
- “Основы радиоуправления”, под ред. В. А. Вейцеля и В. Н. Типугина. – М.: Сов. радио, 1973.
- “Радиотехнические системы передачи информации”, П. И. Пеннин, Л. И. Филиппов. – М.: Радио и связь, 1984.
- “Автоматизированная модель радиолинии с цифровой передачей информации”, уч. пособие, В. А. Вейцель, С. С. Нужнов. – М.: МАИ, 1985.
- “Методические указания к курсовому проекту «Радиолинии с цифровой передачей информации»”, авт.-сост. В. А. Вейцель, А. И. Куприянов, М. И. Жодзишский. – М.: МАИ, 1987.
1 см. “Теория и проектирование радиосистем”, Л. В. Березин, В. А. Вейцель. – М.: Сов. радио, 1977. стр. 202