Проектирование командно-измерительной радиолинии системы управления летательным аппаратом
московский государственный ордена ленина И ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИавиационный институт имени СЕРГО ОРДЖОНИКИДЗЕ
(технический университет)
факультет радиоэлектроники ла
Кафедра 402
Отчет по практическим занятиям по курсу«Радиосистемы управления и передачи информации»
на тему
«Проектированиекомандно-измерительной радиолиниисистемы управления летательным аппаратом»
Выполнил: О. А. Левин и др.,
гр. 04-517
Преподаватель: В. В. Заикин
москва
1997
Техническое заданиеСпроектировать командно-измерительную линию, взяв в качестве основы функциональную схему, изображенную на рис. 1 при следующих исходных данных:
- Время сеанса связи не более 10 минут.
- За сеанс требуется передать по информационному каналу не менее 105 символов при вероятности ошибки на символ не больше 10-3.
- В сеансе требуется измерить дальность с ошибкой не более 20 м при точности прогноза 50 км.
- Энергетический потенциал (отношение мощности сигнала к спектральной плотности шума) на входе приемника — 104 Гц.
- Несущая частота радиолинии — 103 МГц.
- Занимаемый радиолинией диапазон частот не более 0,5 МГц.
- Априорная неизвестность частот в сигнале до 10-5 от номинала.
- Точность и достоверность измерений и передачи информации определяются в основном шумом.
- Шумовые ошибки в запросной и ответной линии дальномера можно считать одинаковыми.
- Дальномер должен выдавать независимые отсчеты дальности с интервалом в 1 секунду.
В результате расчета должны быть выбраны следующие основные параметры подсистем передающего и приемного трактов:
- частота задающего генератора в передающем тракте;
- скорость передачи информационных символов;
- параметры фазового модулятора передатчика;
- число каскадов в генераторах ПС-кода;
- параметры системы ФАПЧ в приемнике;
- полоса пропускания ВЧ-преобразователя в приемнике;
- полосы пропускания полосового ограничителя и ФНЧ в аппаратуре разделения каналов;
- параметры системы тактовой синхронизации в аппаратуре декодирования.
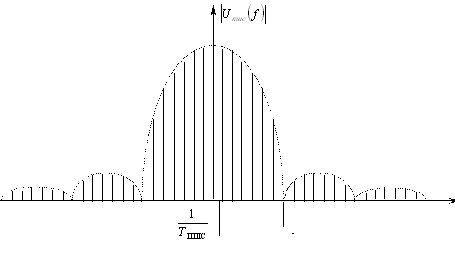
Рис. 1. Спектр ПШС
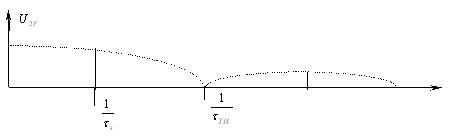
Рис. 2. Спектр сигнала тактовой синхронизации
UПШСх2F(f)
Рис. 3. Правая половина спектра сигнала в радиолинии
Рис. 4. Спектр сигнала на несущей
Выбор параметров системыШумовая полоса ФАПЧПоложим, что на режим захвата можно выделить 10% времени сеанса (1 мин.). Диапазон неизвестности частоты задан, как 10-5 от номинала 1 ГГц, т. е. поиск надо вести в полосе ![]() . Для надежности этот диапазон надо пройти 5-6 раз, поэтому один проход будет совершаться за время Тп=10 с. Отсюда получим требуемую скорость перестройки частоты:
. Для надежности этот диапазон надо пройти 5-6 раз, поэтому один проход будет совершаться за время Тп=10 с. Отсюда получим требуемую скорость перестройки частоты:![]() . Для надежного захвата сигнала при такой скорости требуется ФАПЧ с достаточно малой инерционностью (широкой шумовой полосой). Шумовая полоса будет определяться по формуле:
. Для надежного захвата сигнала при такой скорости требуется ФАПЧ с достаточно малой инерционностью (широкой шумовой полосой). Шумовая полоса будет определяться по формуле:
![]()
Дисперсия шумовой ошибки определяется по формуле:
![]()
где: GШ — спектральная плотность шума на входе ФАПЧ (Вт/Гц), РСН — мощность гармоники на несущей частоте. Положим ![]() , тогда необходимо иметь:
, тогда необходимо иметь:
![]()
В техническом задании указан полный энергетический потенциал радиолинии — 104 Гц. Следовательно, на гармонику с несущей частотой следует выделить ![]() от полной мощности сигнала. Мощность гармоники на несущей:
от полной мощности сигнала. Мощность гармоники на несущей: ![]() . Учитывая, что полная мощность сигнала КИМ-ФМн-ФМ будет
. Учитывая, что полная мощность сигнала КИМ-ФМн-ФМ будет ![]() , имеем
, имеем ![]() .
.
На режим приема в сеансе остается 9 минут. За это время надо передать 105 символов. Значит длительность одного символа ТПС<540·10-5 с. Информация передается третьим членом в спектре сигнала. Соответствующая мощность:
![]()
где ηи — часть мощности, затрачиваемая на передачу информации. Вероятность ошибки не должна превышать 10-3, поэтому (из интеграла вероятности): РСИ/GШИ>890 Гц.
![]()
Из предыдущих расчетов имеем:
![]()
![]()
Решив эти трансцендентные уравнения, получим: mC=1,085 рад., mИ=1 рад.
Распределение мощности между компонентами сигналаВыше было найдено, что на несущую приходится 0,13, а на информацию — 0,089 полной мощности сигнала. Мощность сигнала синхронизации будет определяться по формуле:

Дальность измеряется по сигналу символьной синхронизации, имеющему остроугольную сигнальную функцию. Максимальная ошибка по дальности будет определяться по формуле:
![]()
где с — скорость распространения радиоволн; k2=10 — коэффициент запаса; β=3/τИ – крутизна наклона главного пика сигнальной функции; Q0=РссТизм — энергия сигнала (время измерения — 1 с). Общая ошибка по дальности (20 м) поровну распределена между запросной и ответной радиолинией, следовательно, ΔRmax=10 м. Зная это, найдем, что τИ<4,4·10-5 с. Следовательно, тактовая частота 2Fт должна быть меньше величины 1/τИ=22,7 кГц
Выбор параметров задающего генератора и генератора ПШСВыберем необходимое число символов в ПШС (nпс):
![]()
Ближайшее целое число, удовлетворяющее этому условию — 127. Пересчитанное значение длительности импульса составит 42,5 мкс и тактовая частота 2Fт=23,53 кГц.
Проверка надежности работы ФАПЧ в режиме захвата и выделения несущейПроверим, не будут ли мешать гармоники сигнала, лежащие рядом с несущей частотой. Полоса ФАПЧ выбрана шириной 80 Гц и в процессе поиска просматривается диапазон ±10 кГц около несущей.
- Полоса частот, связанная с модуляцией несущей сигналом КИМ-ФМн, отстоит на частоту 4Fт=±47,06 кГц и в полосу поиска не попадает.
- В режиме слежения за несущей сигнал выделяется полосой ФАПЧ ±40 кГц. Ближайшая гармоника синхросигнала отстоит на частоту 1/Тпс=185 Гц и в полосу ФАП не попадает.
- Проверим, не может ли произойти ложный захват ФАПЧ гармоникой, связанной с модуляцией несущей синхросигналом. Они находятся в полосе ФАПЧ и могут селектироваться только по амплитуде. Амплитуда Аmax наибольшей из гармоник синхросигнала, попадающей в полосу поиска:
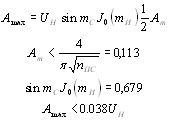
где Аm — амплитуда максимальной гармоники в синхросигнале. Полезная гармоника имеет амплитуду 0,362UН, т. е. почти в 100 раз больше по мощности, что обеспечивает легкую селекцию.
Определение необходимых полос пропускания фильтров в приемном тракте- Полосовой ограничитель должен пропускать сигнал КИМ-ФМн. В спектре сигнала UД(t) после синхронного детектора сигнал расположен вблизи частоты 47,06 кГц и занимает полосу примерно (4… 5)/ТПС=1 кГц. При нестабильности частоты 10-5 от номинала частотный сдвиг не превысит 500 Гц. Следовательно, полосовой ограничитель должен быть настроен на частоту 47,06 кГц и иметь полосу пропускания около 1 кГц.
- ФНЧ канала синхронизации выделяет синхросигнал. Считая, что полоса занимаемых частот соответствует примерно 12FТ, находим необходимую полосу фильтра в 142 кГц.
- Высокочастотный преобразователь приемного тракта должен пропустить достаточное число полезных компонент сигнала, т.е. иметь полосу не менее ±12FТ, к этому надо добавить нестабильность несущей (±10 кГц). Следовательно, полоса должна быть порядка 2(142+±10) кГц= =300 кГц. Эта же величина определяет занимаемый радиолинией диапазон частот.
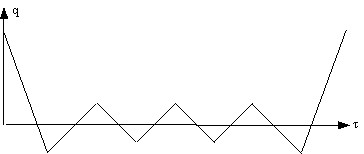
Рис. 5. Сигнальная функция синхросигнал
В задании указана точность прогноза дальности 50 км. Это обеспечивает прогноз по задержке ±0,333·10-3 с. Поскольку Тпс=5,4·10-3 с, а τи=4,25·10-5 с, в диапазон исследуемых задержек может попасть только один большой пик сигнальной функции и большое число малых пиков высотой 1/nпс. Надежные измерения обеспечиваются только при условии:
Зная, что в данном случае
![]() видим, что это условие выполняется с большим запасом. Таким образом, заданная точность прогноза при выбранных параметрах сигнала надежно обеспечивает однозначное определение дальности.
видим, что это условие выполняется с большим запасом. Таким образом, заданная точность прогноза при выбранных параметрах сигнала надежно обеспечивает однозначное определение дальности.